一种用于颈部康复训练的康复机器人
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及康复训练机器人设备技术领域,更具体地说,涉及一种用于颈部康复训练的康复机器人。
背景技术
康复训练机器人能够对在老人或肢体伤残患者进行主动或者被动的康复训练,对提高患者最终康复程度有极其重要的作用。机器人技术的发展及其与临床康复医学的结合为康复机器人研究提供了一个很好的契机。利用机器人及其相关技术对训练过程进行客观的监测与评价,提高偏瘫康复训练的针对性及科学性,同时将治疗医师从繁重的体力劳动中解脱出来,为患者制定更好的康复方案,进一步提高康复的效率。中国从21世纪初期开始逐渐重视康复机器人的发展。
针对于一种用于颈部康复训练的康复机器人,人们在使用的过程中,需要平躺至机器人的上方,通过牵引布将颈部包裹,从而对颈部起到牵引和按摩的作用。
然而,现有的颈部康复机器人体积庞大,在使用的过程中,患者需要在固定的地点才能够对颈部进行康复训练,因此训练麻烦,耗时长,对患者造成诸多不便。
发明内容
1.要解决的技术问题
针对现有技术中存在的问题,本发明的目的在于提供一种用于颈部康复训练的康复机器人,它可以实现将本装置套设至患者颈部,通过收卷盘的正反转动来往复拉动驱动电机,使驱动电机同时拉动两根驱动箱,在力的作用下,两根驱动箱分别拉动与其固定连接的拉块,使得围成圆形的弹性驱动杆直径逐渐缩小,并在缩小的同时拉动多个限位套,使多个弯曲的限位套分别顶动多个顶杆上升,利用托板对患者的颈部上方进行支撑,从而起到一定的牵引作用,相较于现有的颈部康复训练机器人,本装置操作简单,避免患者需要去固定的地点才能够进行康复训练,同时结构小巧,随时随地可对颈部进行康复训练,制造成本低。
2.技术方案
为解决上述问题,本发明采用如下的技术方案。
一种用于颈部康复训练的康复机器人,包括第一C型连接套,所述第一C型连接套上插接有多个均匀分布的顶杆,多个所述顶杆上端固定连接有同一个托板,所述第一C型连接套下侧壁固定连接有连接固定板,所述连接固定板下端固定连接有第二C型连接套,多个所述顶杆下端与第二C型连接套侧壁上均固定连接有多个铰接块,每组铰接块之间均铰接有弹性C形杆,多个所述弹性C形杆内壁上均固定连接有限位套,多个所述限位套内插接有同一个弹性驱动杆,所述弹性驱动杆两端均固定连接有拉块,且两个拉块分别上下排列,两个所述拉块上均安装有滑动机构,所述第一C型连接套和第二C型连接套侧壁之间固定连接有外围固定壳,所述外围固定壳上安装有驱动机构,所述驱动机构上固定安装有传动机构。它可以实现将本装置套设至患者颈部,通过收卷盘的正反转动来往复拉动驱动电机,使驱动电机同时拉动两根驱动箱,在力的作用下,两根驱动箱分别拉动与其固定连接的拉块,使得围成圆形的弹性驱动杆直径逐渐缩小,并在缩小的同时拉动多个限位套,使多个弯曲的限位套分别顶动多个顶杆上升,利用托板对患者的颈部上方进行支撑,从而起到一定的牵引作用,相较于现有的颈部康复训练机器人,本装置操作简单,避免患者需要去固定的地点才能够进行康复训练,同时结构小巧,制造成本低,可随时随地对颈部进行康复训练。
进一步的,所述滑动机构包括均与两个拉块固定连接的滑动条,所述外围固定壳左右两侧内壁均固定连接有与滑动条相匹配的滑动槽,且滑动条位于滑动槽内部,能够有效避免在拉动拉块的过程中拉块发生偏移。
进一步的,所述驱动机构包括与外围固定壳固定连接的驱动箱,所述驱动箱右侧壁固定连接有驱动电机,所述驱动电机输出端固定连接有转动轴,所述转动轴贯穿驱动箱右侧壁与驱动箱左侧内壁转动连接,所述转动轴位于驱动箱中心处固定连接有收卷盘,能够通过驱动电机作为驱动力自动对颈部起到牵引的作用。
进一步的,所述传动机构包括与收卷盘绕接的第一拉绳,所述第一拉绳另一端固定连接有两个第二拉绳,两个所述第二拉绳分别与拉块固定连接,能够同时拉动两个拉块,使得两个拉块同步移动。
进一步的,所述外围固定壳左右两侧内壁均固定连接有限位半球,两个所述限位半球上均开凿有穿孔,且第二拉绳贯穿穿孔设置,能够对第二拉绳起到限位的作用,避免在使用过程中,第二拉绳与限位套或弹性驱动杆发生缠绕。
进一步的,所述弹性驱动杆采用弹性金属制成,弹性金属材质具有回复作用,使得在牵引颈部结束后自动复原。
进一步的,所述连接固定板内壁固定连接有棉垫,且棉垫内壁中心处向内凸起,增强患者在使用时的舒适度。
进一步的,多个所述顶杆位于第一C型连接套上侧均套设有防护伸缩套,且防护伸缩套上下两端分别与第一C型连接套和托板固定连接,避免在托板上下移动的过程中,托板与第一C型连接套夹伤患者的颈部。
进一步的,所述第一C型连接套和第二C型连接套的两端距离设置为8~10cm,且第一C型连接套与第二C型连接套均为弹性塑料制成,便于患者进行穿戴。
进一步的,所述滑动槽开凿至外围固定壳两端,能够将两个拉块进行拆卸,扩大了穿戴时可拉伸的尺寸,进一步便于患者进行穿戴。
3.有益效果
相比于现有技术,本发明的优点在于
(1)本方案可以实现将本装置套设至患者颈部,通过收卷盘的正反转动来往复拉动驱动电机,使驱动电机同时拉动两根驱动箱,在力的作用下,两根驱动箱分别拉动与其固定连接的拉块,使得围成圆形的弹性驱动杆直径逐渐缩小,并在缩小的同时拉动多个限位套,使多个弯曲的限位套分别顶动多个顶杆上升,利用托板对患者的颈部上方进行支撑,从而起到一定的牵引作用,相较于现有的颈部康复训练机器人,本装置操作简单,避免患者需要去固定的地点才能够进行康复训练,同时结构小巧,制造成本低,可随时随地对颈部进行康复训练。
(2)滑动机构包括均与两个拉块固定连接的滑动条,外围固定壳左右两侧内壁均固定连接有与滑动条相匹配的滑动槽,且滑动条位于滑动槽内部,能够有效避免在拉动拉块的过程中拉块发生偏移。
(3)驱动机构包括与外围固定壳固定连接的驱动箱,驱动箱右侧壁固定连接有驱动电机,驱动电机输出端固定连接有转动轴,转动轴贯穿驱动箱右侧壁与驱动箱左侧内壁转动连接,转动轴位于驱动箱中心处固定连接有收卷盘,能够通过驱动电机作为驱动力自动对颈部起到牵引的作用。
(4)传动机构包括与收卷盘绕接的第一拉绳,第一拉绳另一端固定连接有两个第二拉绳,两个第二拉绳分别与拉块固定连接,能够同时拉动两个拉块,使得两个拉块同步移动。
(5)外围固定壳左右两侧内壁均固定连接有限位半球,两个限位半球上均开凿有穿孔,且第二拉绳贯穿穿孔设置,能够对第二拉绳起到限位的作用,避免在使用过程中,第二拉绳与限位套或弹性驱动杆发生缠绕。
(6)弹性驱动杆采用弹性金属制成,弹性金属材质具有回复作用,使得在牵引颈部结束后自动复原。
(7)连接固定板内壁固定连接有棉垫,且棉垫内壁中心处向内凸起,增强患者在使用时的舒适度。
(8)多个顶杆位于第一C型连接套上侧均套设有防护伸缩套,且防护伸缩套上下两端分别与第一C型连接套和托板固定连接,避免在托板上下移动的过程中,托板与第一C型连接套夹伤患者的颈部。
(9)第一C型连接套和第二C型连接套的两端距离设置为8~10cm,且第一C型连接套与第二C型连接套均为弹性塑料制成,便于患者进行穿戴。
(10)滑动槽开凿至外围固定壳两端,能够将两个拉块进行拆卸,扩大了穿戴时可拉伸的尺寸,进一步便于患者进行穿戴。
附图说明
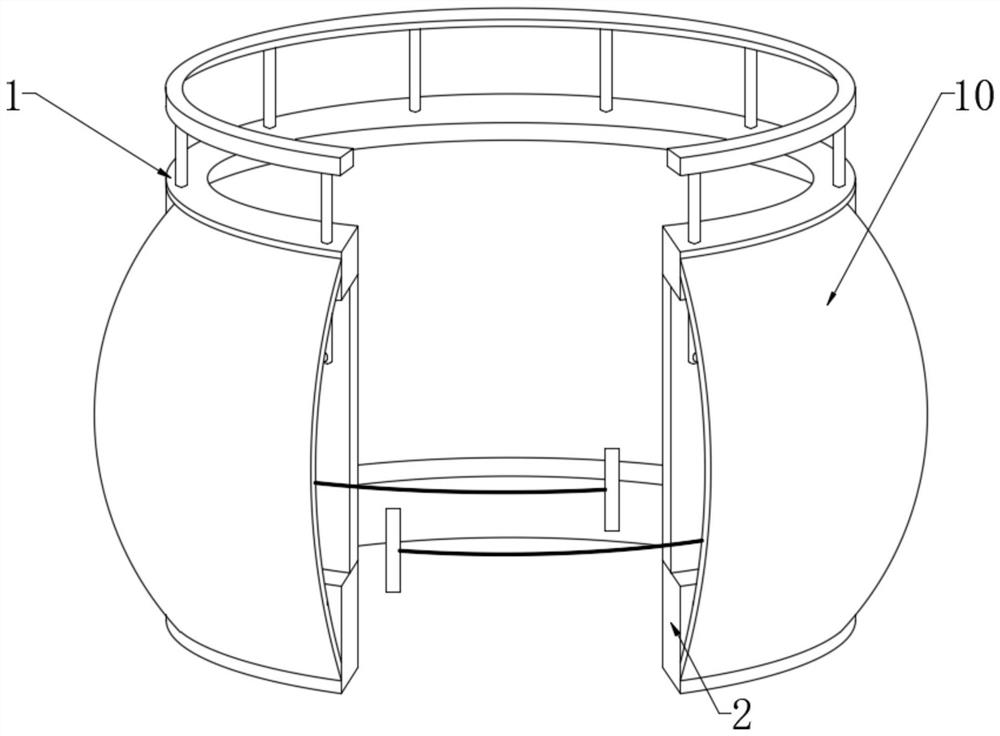
图1为本发明外观图;
图2为本发明主视剖视图;
图3为本发明限位套处的结构示意图;
图4为本发明外围固定壳处的主视剖视图;
图5为本发明外围固定壳处的俯视剖视图;
图6为图5中A处的放大图;
图7为图6中B处的放大图。
图中标号说明:
1第一C型连接套、2第二C型连接套、3顶杆、31铰接块、4托板、5连接固定板、6弹性C形杆、7限位套、8弹性驱动杆、9拉块、91滑动条、92滑动槽、10外围固定壳、11驱动机构、111驱动箱、112驱动电机、113转动轴、114收卷盘、12传动机构、121第一拉绳、122第二拉绳、123限位半球、124穿孔、13棉垫、14防护伸缩套。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例1:
请参阅图1-6,一种用于颈部康复训练的康复机器人,包括第一C型连接套1,第一C型连接套1上插接有多个均匀分布的顶杆3,多个顶杆3上端固定连接有同一个托板4,第一C型连接套1下侧壁固定连接有连接固定板5,连接固定板5下端固定连接有第二C型连接套2,多个顶杆3下端与第二C型连接套2侧壁上均固定连接有多个铰接块31,每组铰接块31之间均铰接有弹性C形杆6,多个弹性C形杆6内壁上均固定连接有限位套7,多个限位套7内插接有同一个弹性驱动杆8,弹性驱动杆8两端均固定连接有拉块9,且两个拉块9分别上下排列,两个拉块9上均安装有滑动机构,第一C型连接套1和第二C型连接套2侧壁之间固定连接有外围固定壳10,外围固定壳10上安装有驱动机构11,驱动机构11包括与外围固定壳10固定连接的驱动箱111,驱动箱111右侧壁固定连接有驱动电机112,驱动电机112输出端固定连接有转动轴113,转动轴113贯穿驱动箱111右侧壁与驱动箱111左侧内壁转动连接,转动轴113位于驱动箱111中心处固定连接有收卷盘114,能够通过驱动电机112作为驱动力自动对颈部起到牵引的作用,在使用时,使用者需启动驱动电机112,驱动电机112通过转动轴113带动收卷盘114正反转,,驱动机构11上固定安装有传动机构12,传动机构12包括与收卷盘114绕接的第一拉绳121,第一拉绳121另一端固定连接有两个第二拉绳122,两个第二拉绳122分别与拉块9固定连接,能够同时拉动两个拉块9,使得两个拉块9同步移动,在收卷盘114正反转时,使其反复拉动第一拉绳121,它可以实现将本装置套设至患者颈部,通过收卷盘114的正反转动来往复拉动驱动电机112,使驱动电机112同时拉动两根驱动箱111,在力的作用下,两根驱动箱111分别拉动与其固定连接的拉块9,使得围成圆形的弹性驱动杆8直径逐渐缩小,并在缩小的同时拉动多个限位套7,使多个弯曲的限位套7分别顶动多个顶杆3上升,利用托板4对患者的颈部上方进行支撑,从而起到一定的牵引作用,相较于现有的颈部康复训练机器人,本装置操作简单,避免患者需要去固定的地点才能够进行康复训练,同时结构小巧,制造成本低,可随时随地对颈部进行康复训练。
请参阅图5,滑动机构包括均与两个拉块9固定连接的滑动条91,外围固定壳10左右两侧内壁均固定连接有与滑动条91相匹配的滑动槽92,且滑动条91位于滑动槽92内部,能够有效避免在拉动拉块9的过程中拉块9发生偏移,在第一拉绳121被反复拉动时,同时第一拉绳121也在拉动拉块9,使围成圆形的弹性驱动杆8直径被反复伸长和缩短,在直径缩短时拉动多个限位套7的内弯处,使多个弯曲的限位套7分别顶动多个顶杆3上升,利用托板4对患者的颈部上方进行支撑,弹性驱动杆8采用弹性金属制成,弹性金属材质具有回复作用,使得在牵引颈部结束后自动复原,在直径伸长时,能够通过弹性驱动杆8材质自动回复,对患者的颈部有一定程度的康复训练作用。
请参阅图6-7,外围固定壳10左右两侧内壁均固定连接有限位半球123,两个限位半球123上均开凿有穿孔124,且第二拉绳122贯穿穿孔124设置,能够对第二拉绳122起到限位的作用,避免在使用过程中,第二拉绳122与限位套7或弹性驱动杆8发生缠绕。
请参阅图2,连接固定板5内壁固定连接有棉垫13,且棉垫13内壁中心处向内凸起,增强患者在使用时的舒适度。
请参阅图2,多个顶杆3位于第一C型连接套1上侧均套设有防护伸缩套14,且防护伸缩套14上下两端分别与第一C型连接套1和托板4固定连接,避免在托板4上下移动的过程中,托板4与第一C型连接套1夹伤患者的颈部。
请参阅图1,第一C型连接套1和第二C型连接套2的两端距离设置为8~10cm,且第一C型连接套1与第二C型连接套2均为弹性塑料制成,便于患者进行穿戴。
请参阅图5,滑动槽92开凿至外围固定壳10两端,能够将两个拉块9进行拆卸,扩大了穿戴时可拉伸的尺寸,进一步便于患者进行穿戴。
以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
- 一种用于颈部康复训练的康复机器人
- 一种适用于多个关节的进阶式康复机器人及其康复训练方法