无人战车控制系统冗余构架总线
文献发布时间:2023-06-19 13:29:16
所属技术领域
本技术发明涉及信息总线技术领域,具体为一种无人战车控制系统冗余构架总线。
背景技术
目前,世界主要国家无人战车技术发展迅猛,已具有快速机动、远程侦察、情报处理、排雷破障和火力打击等支援与作战能力。无人战车控制系统是无人战车重要组成部分,其采用的数据总线架构直接决定着无人战车的性能,特别是当前的无人战车控制系统采用分布式综合模块化电子系统,传统的控制系统构架总线无法满足对总线时间确定性、多冗余高容错、可组合、可继承性、高带宽等指标要求,制约了炮塔以及武器站火控系统性能的发挥,进而降低了战场生存率。特别是未来无人战车总线必须具有更多的功能、更好的适应性、更高的可靠性和更强的生存能力。
发明内容
本发明的目的在于克服现有的技术的不足,提供一种无人战车控制系统冗余构架总线本技术发明通过如下技术方案予以实现:
提供一种无人战车控制系统冗余构架总线,其特征在于采用CAN总线和时间触发总线组成的异构冗余构架主干路总线,无人战车控制系统根据功能划分为若干个功能块,每个功能块内部的系统架构由功能控制器搭建功能支路总线,功能支路总线也采用CAN总线和时间触发总线组成的异构冗余构架,功能块支路总线通过CAN总线和时间触发总线接口与主干路总线连接,对于总线数据及指令任务分为优先级任务和一般任务,在正常工作中对于优先级任务由时间触发总线承担,一般任务由CAN总线承担,关键信息和指令自动双总线备份或下达,当其中1条总线出现故障,正常工作的总线承担所有的总线数据及指令,直至故障总线回复正常。无人战车控制系统冗余构架总线保证系统在单条支路出现故障的情况下,自动屏蔽故障支路的数据,保证系统仍能正常运行,以满足高安全性、高可靠性的要求。
所述异构冗余构架主干路总线由CAN总线和时间触发总线组成,其特征是对于总线数据及指令任务分为优先级任务和一般任务,在正常工作中对于优先级任务由时间触发总线承担,一般任务由CAN总线承担,关键信息自动双总线备份;总线诊断器双总线进行监听判断,当监听到其中1条总线出现故障,通过正常总线下达汇报主控制器,同时向车控单元、炮控单元、自主单元、辅助单元下达任务切换指令,正常工作的总线承担所有的总线数据及指令,直至故障总线回复正常。
所述功能块内部的支路总线由CAN总线和时间触发总线组成,其特征是功能控制器将支路总线传递的数据分为优先级任务和一般任务,在正常工作中对于优先级任务由时间触发总线承担,一般任务由CAN总线承担,关键信息自动双总线备份;同时将主干路下达的总线指令任务分为优先级任务和一般任务,在正常工作中对于优先级任务由时间触发总线承担,一般任务由CAN总线承担,关键指令自动双总线下达。功能控制器收到总线诊断器下达任务切换指令,将正常的主干路总线数据及指令与支路总线交互,直至故障总线回复正常。
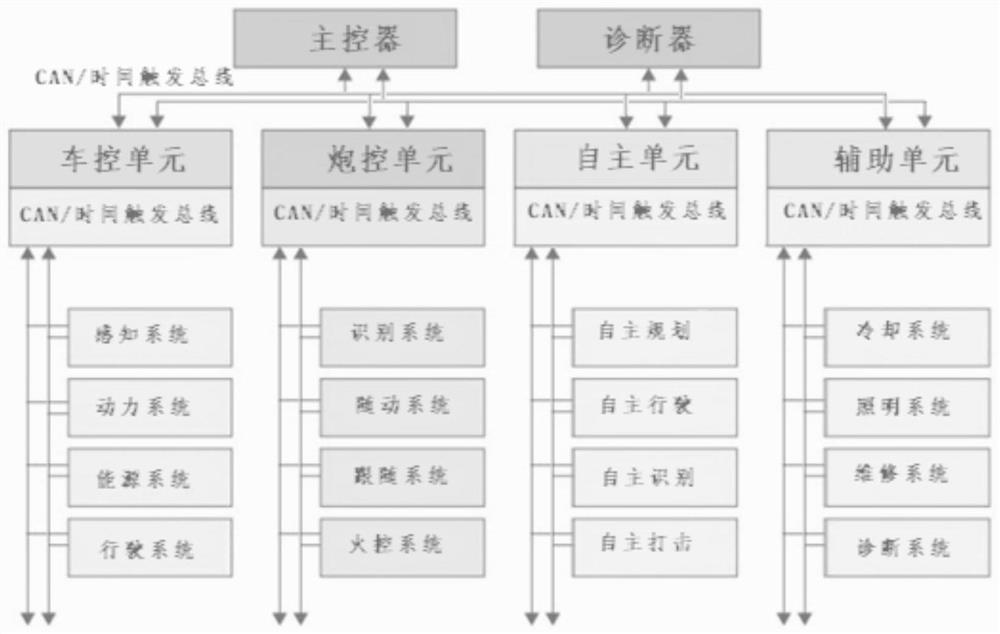
所述支路总线功能块包括车控单元、炮控单元、自主单元、辅助单元,其特征是车控单元主要由感知系统、动力系统、能源系统、行驶系统组成,其功能是通过传感器完成环境感知,发动机提供动力或发电,对电池储能或供电,控制轮毂电机行驶;炮控单元主要由识别系统、随动系统、跟随系统、火控系统组成,其功能是通过光电识别目标物,方位电机和高低电机控制炮塔随动,光电锁定目标实现打击跟随,最终火控系统实现打击;自主单元主要由自主规划、自主行驶、自主识别、自主打击组成,其功能是根据地图信息自主规划,根据雷达、视觉、红外传感器信息以及导航和惯导组件自主行驶避障,根据光电提供图像识别目标,根据打击指令自动跟随目标实现自主打击;辅助单元主要由冷却系统、照明系统、维修系统、诊断系统组成,其功能是辅助无人战车实现冷却、照明、维修及故障诊断。
本发明与现有技术相比具有如下优点:
(1)本发明的无人战车控制系统冗余构架总线,采用CAN总线和时间触发总线组成的异构冗余构架主干路总线和功能支路总线,对不同等级的任务节点进行了时间、空间和网络上的划分,通过时间、空间及网络上的合理划分,保证了数据的处理及传输不会发生冲突及拥塞,并且通过硬件层面进行标准化使得整个控制系统的复杂度得到降低,联调测试时间也大大缩短。
(2)本发明对控制系统的输入、输出、处理器、总线系统等硬件模块都进行冗余设计,支持在多个节点上实施冗余节点和冗余功能,单个节点的故障不会传播到整个系统。诊断其进行总线监听,具有故障的检测、识别、隔离、评估和约束功能,保证系统在单条总线出现故障的情况下,自动分配故障总线的数据,保证系统仍能正常运行,以满足高安全性、高可靠性的要求。
附图说明
下面结合附图和实施例对本技术发明进一步说明。
图1是无人战车控制系统冗余构架总线组成框图。
图2是无人战车控制系统冗余构架总线拓扑结构。
图3是无人战车的能源控制系统。
图4是无人战车控制系统冗余构架总线软件结构。
具体实施方式
下面采用附图和实施例对本技术发明做进一步说明,此处所说明的附图用来提供对本技术发明的进一步理解,构成本申请的一部分,并不构成对本技术发明的限定。
无人战车控制系统是复杂的分布式系统,结合了视觉,雷达,激光雷达,接近传感器,北斗,地图,导航,规划和控制等组件,这些不同的模块必须组合成可靠、安全、牢固的系统,要求系统具有开放性,互可操作性与互用性,功能模块的智能化与功能自治性,系统结构的高度分散性以及对环境的适应性等。如图1所示,无人战车控制系统采用CAN总线和时间触发总线组成的异构冗余构架。
CAN通信是一套高性能、高可靠性的通信机制,目前已广泛应用在汽车电子领域。时间触发总线一种可容错的基于时间触发的协议,支持在多个节点上实施冗余节点和冗余功能,通信控制芯片的操作基于其内部的容错高精度全局时钟来建立的时间基准。无人战车控制系统有大量的代码量和软件包,运行和存储这些代码就需要更大的存储空间和更强的运算能力,为了不让车载网络架构更加复杂,无人战车控制系统根据功能划分为若干个功能块,每个功能块内部的系统架构由功能控制器搭建功能支路总线,如图2所示,无人战车控制系统冗余构架总线包括车控单元、炮控单元、自主单元、辅助单元,利用一个全局时钟将所有消息同步起来,所有节点的时钟是通过高精度专用时钟完成的同步。其中车控单元主要通过传感器完成环境感知,发动机提供动力或发电,对电池储能或供电,控制轮毂电机行驶;炮控单元主要是通过光电识别目标物,方位电机和高低电机控制炮塔随动,光电锁定目标实现打击跟随,最终火控系统实现打击;自主单元主要是根据地图信息自主规划,根据雷达、视觉、红外传感器信息以及导航和惯导组件自主行驶避障,根据光电提供图像识别目标,根据打击指令自动跟随目标实现自主打击;辅助单元主要是辅助无人战车实现冷却、照明、维修及故障诊断。
对更好本技术发明做进一步说明,无人战车的能源系统如图3所示,将其数据和指令在 CAN总线和时间触发总线组成的异构冗余架构上实现,无人战车的电池除了给动力电机供电以外,还要给电动附件供电,为了获得最大的续驶里程和工作效率,车控单元将负责整车的能量管理,以提高能量的利用率,同时对车辆的状态以及总线状态进行实时检测,通过由CAN 总线和时间触发总线组成支路总线读取各个子系统的信息,车控单元连续监视整车电控系统,进行故障诊断,根据故障内容,及时进行相应安全保护处理,同时检测车辆状态及其各子系统状态信息与总线状态,将状态信息和故障诊断信息经过车控单元传送到主干路总线并接受相关的指令,当其中1条总线出现故障,正常工作的总线承担所有的总线数据及指令,直至故障总线回复正常。无人战车控制系统冗余构架总线保证系统在单条支路出现故障的情况下,自动屏蔽故障支路的数据,保证系统仍能正常运行,以满足高安全性、高可靠性的要求。
在无人战车控制系统冗余构架总线软件系统运行过程中,不同功能函数被事先定义好的排序文件依次调用、逐个运行。静态驱动系统的优点是资源分配问题被事先一次性解决,每个函数的具体运行区间亦被提前锁定,确保了对于无人战车控制系统有苛刻要求的功能函数运行需求。结合多核处理器,对于那些对运行时间没有很高要求的功能函数来说,动态驱动系统就拥有许多优点,为在线优化函数运行顺序提供可能。从图4中可以看到,整套架构以 Linux为内核的POSIX-OS作为基石,可以在多核处理器系统中直接运行,也可以在额外的虚拟硬件核环境中独立运行。总线处理软件包分别构成了诊断服务、安全措施、通信服务等功能块,不仅在控制器核诊断器中应用,并集成在功能单元总线软件中,无人战车控制系统扩展灵活、安全可靠性高、安装调试简单以及具有良好的性能价格比。
综上所述,无人战车控制系统冗余构架总线,其特征在于包括采用CAN总线和时间触发总线组成的异构冗余构架主干路总线,无人战车控制系统根据功能划分为若干个功能块,每个功能块内部的系统架构由功能控制器搭建功能支路总线,功能支路总线也采用CAN总线和时间触发总线组成的异构冗余构架,功能块支路总线通过CAN总线和时间触发总线接口与主干路总线连接,对于总线数据及指令任务分为优先级任务和一般任务,在正常工作中对于优先级任务由时间触发总线承担,一般任务由CAN总线承担,关键信息和指令自动双总线备份或下达,当其中1条总线出现故障,正常工作的总线承担所有的总线数据及指令,直至故障总线回复正常。无人战车控制系统冗余构架总线保证系统在单条支路出现故障的情况下,自动屏蔽故障支路的数据,保证系统仍能正常运行,以满足高安全性、高可靠性的要求。
以上所述的具体实施方法,对本技术发明的目的、技术方案和有益效果进行了详细说明,所应理解的是,以上所述仅为本技术发明的具体实施方式而已,并不用于限定本技术发明的保护范围,凡在本技术发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本技术发明的保护范围之内。
- 无人战车控制系统冗余构架总线
- PAS100控制系统的总线冗余构架