一种USV路径跟踪控制方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及无人艇(USV)运动控制领域,涉及一种USV路径跟踪控制方法,特别是一种基于离散滑模的USV路径跟踪控制方法。
背景技术
无人艇(USV)作为一种水面高速船,相对于常规船舶其水动阻力小、受风浪干扰的影响大,同时由于横向欠驱动,因此其高精度路径跟踪控制难度大。目前提高其路径跟踪精度的方法主要从改进导引算法、快速估计环境扰动和提高控制精度等方面入手。但是大部分路径跟踪算法都是基于连续系统设计的,而实际工程中无人艇的控制律都是通过数字控制器实现的,基于连续系统设计的控制律直接作用于数字控制器会引入未知的动态,甚至导致系统不稳定。
虽然现阶段已经出现针对离散系统设计的离散滑模控制算法,能够直接作用于USV数字控制器,但需要系统的采样周期尽可能小才能保证系统的稳定性。但是在实际工程中,系统的采样周期受硬件和成本的约束,不可无限小,导致该方法使用具有局限性。因此,研究不受采样时间约束的高精度路径跟踪控制算法具有十分重要的理论价值和实践意义。
发明内容
针对上述现有技术,本发明要解决的技术问题是提供一种不受采样时间约束的USV路径跟踪控制方法,将系统稳定性与采样周期进行解耦,使得系统在任意采样周期情况下都可以保证稳定、可靠运行,提高路径跟踪控制精确度。
为解决上述技术问题,本发明的一种USV路径跟踪控制方法,包括以下步骤:
步骤1:建立SF坐标系位置跟踪误差系统,设计有限时间侧滑角观测器得到侧滑角估计值
步骤2.采用FLOS导引算法,利用侧滑角估计值
步骤3:建立USV艏向动态误差离散控制模型和纵向速度跟踪误差离散控制模型;
步骤4:通过构造离散滑模面和离散自适应快速幂次趋近律设计艏向离散控制器和纵向速度离散控制器,并采用离散干扰估计器对外界环境力进行补偿,完成对期望艏向和期望速度在扰动下的跟踪。
进一步的,步骤1中设计有限时间侧滑角观测器得到侧滑角估计值
设计未知时变侧滑角观测器:
其中,λ
其中,p=[x,y]
则侧滑角估计值为:
进一步的,步骤2中利用侧滑角估计值
其中,ψ
其中,k>0为待设计参数,Δ
其中,p=[x,y]
进一步的,步骤3中建立USV艏向动态误差离散控制模型和纵向速度跟踪误差控制模型具体为:
定义艏向角误差ψ
其中,m
定义纵向速度跟踪误差为:u
其中,d
进一步的,步骤4中通过构造离散滑模面和离散自适应快速幂次趋近律设计艏向离散控制器具体为:
选取艏向动态误差系统的离散滑模面:
其中,α
设计艏向离散自适应快速幂次趋近律:
其中,c
自适应因子
其中,
采用时延估计法估计作用在USV艏向动态误差模型上当前时刻的扰动d
其中,m
设计艏向离散控制器τ
式中,χ
其中,τ
进一步的,步骤4中通过构造离散滑模面和离散自适应快速幂次趋近律设计纵向速度离散控制器具体为:
选取纵向速度跟踪误差模型的离散积分滑模面为:
其中,α
设计纵向速度离散自适应快速幂次趋近律:
其中,c
采用时延估计法估计纵向环境扰动d
其中,u
设计纵速度离散控制器τ
与现有技术相比,本发明的有益效果是:
1.本发明采用FLOS导引算法取代ELOS导引算法,使得控制系统的路径跟踪误差能够渐进收敛到零,具有了全局渐进稳定性。
2.本发明对连续快速趋近律进行离散化并将其改进,使得控制系统的稳定性与采样周期解耦,使得系统稳定性不受采样周期的限制,保证了无人艇运行过程中的可靠性与稳定性。
附图说明
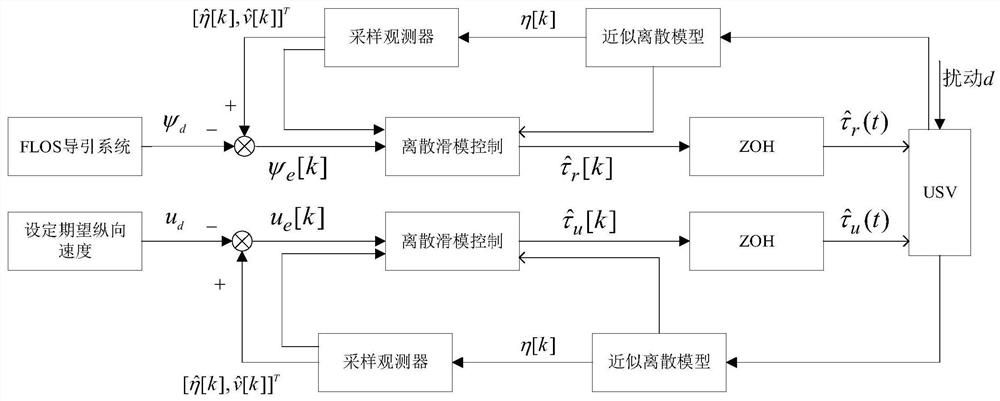
图1是本发明离散采样系统路径跟踪离散滑模控制原理框图;
图2是本发明连续系统USV正弦路径跟踪航迹曲线;
图3是本发明SF坐标系下纵向、横向位置误差曲线;
图4是本发明侧滑角实际值和侧滑角观测器观测误差曲线;
图5是本发明连续系统USV艏向角和艏向角跟踪误差曲线;
图6是本发明连续系统USV纵向速度和纵向速度跟踪误差曲线;
图7是本发明连续系统实际干扰及其干扰估计曲线;
图8是本发明连续系统USV控制输入曲线。
具体实施方式
下面结合说明书附图和具体实施方式对本发明做进一步说明。
结合图1,本发明包括以下步骤:
步骤1.建立SF坐标系位置跟踪误差系统,在此坐标系基础上设计有限时间侧滑角观测器,构造
步骤1.1假设期望路径在水平面上以θ为路径参数,且一阶、二阶导数存在且有界,在北东坐标系中,期望路径曲线上任意路径目标跟踪点的坐标记为p(θ)=[x(θ),y(θ)]
ψ
考虑北东坐标系下的位置误差为:η=[x-x(θ),y-y(θ),ψ-ψ(θ)]
步骤1.2设计有限时间侧滑角观测器:
对上式中的纵向位置误差求导可得:
其中,β=arctan 2(v,u)代表侧滑角,g(u,ψ,ψ
其中,λ
则侧滑角估计值为:
证明有限时间侧滑角观测器式的观测误差能在有限时间内收敛至0过程如下:
定义观测误差如下:
对上式观测误差求导可得:
观测误差e
故当g的估计值
步骤2.基于侧滑角观测器设计FLOS导引算法,结合侧滑角估计值,给出期望的艏向、期望速度以及路径参数的更新率。设计时变动态前视距离参数,减小横向跟踪位置误差,通过改进导引算法实现环境干扰下的精确路径跟踪;
设计如下期望艏向:
为减小横向位置跟踪误差,提高路径跟踪精度,选择时变动态前视距离参数
其中,k>0为设计参数,Δ
可以看出,当横向位置误差y
期望速度和路径参数更新率设计为如下形式:
式中,k
证明FLOS导引系统可以使路径跟踪误差(x
因此,可得:
当t≥t
定义ε=[x
对上式求导可得:
由于实际的路径跟踪误差存在
其中
k=2min(k
故FLOS导引系统具有全局渐进稳定特性。
步骤3.建立USV艏向动态误差离散控制模型和纵向速度跟踪误差控制模型。基于USV连续运动数学模型,考虑数字控制器的采样频率采用Euler近似离散法,构造纵向和回转的离散误差模型,使之适用于数字控制器的艏向跟踪控制和纵向速度控制设计。
步骤3.1定义艏向误差ψ
其中,m
Euler近似离散模型艏向动态误差系统如下:
其中,T为数字控制器的采样周期,k>0且为正整数。
步骤3.2定义路径跟踪任务时,纵向速度跟踪误差为:u
步骤4.构造离散终端滑模面和动态离散自适应快速幂次趋近律,分别设计艏向和速度离散控制器,并通过引入离散干扰估计器对外界环境力补偿,实现对期望艏向和期望速度在扰动下的快速跟踪,进而实现USV精确路径跟踪。改进的离散自适应快速幂次趋近律,能够在任意给定采样周期满足系统滑动模态存在性和可达性条件,即实现系统的控制稳定性与数字控制器的采样周期解耦:
步骤4.1USV艏向控制器设计:
选取艏向动态误差系统的离散滑模面如下:
其中,0<Tα
设计艏向的离散自适应快速幂次趋近律:
其中,c
自适应因子
其中,
采用时延估计法,估计作用在USV艏向动态误差模型上当前时刻的扰动d
设计艏向离散跟踪控制器τ
式中,
步骤4.2USV纵向速度控制器设计
选取速度动态误差模型的离散积分滑模面为:
其中,α
设计速度的离散自适应快速幂次趋近律:
其中,c
采用时延估计法估计纵向环境扰动d
其中,d
设计速度离散跟踪控制器τ
图2为USV正弦路径跟踪航迹曲线,可以看出基于Euler近似离散模型设计的控制器作用于原连续系统时,可以出色的完成USV路径跟踪任务。图3为USV在SF坐标系下位置误差向量,可以看出纵向位置误差收敛精度较高,横向位置误差收敛精度较低。纵向位置误差收敛速度较横向位置误差收敛速度较快。图4为USV在路径跟踪过程中的侧滑角真实值及观测器观测值,可以看出侧滑角始终存在小范围波动,侧滑角观测误差初始阶段观测误差较大,但依旧快速收敛至0。图5为USV艏向角和艏向角误差曲线,从图中可以看出USV艏向角在60s后大致呈正弦变化趋势,符合USV在跟踪正弦路径时,需要不断调整艏向角的情况。图6为USV纵向速度及纵向速度误差曲线,相比USV艏向控制系统,USV纵向速度控制系统收敛速度相对较慢,但纵向速度跟踪误差收敛精度相较艏向角跟踪误差收敛精度要高。图7为USV干扰实际值及采用时延估计法所估计的干扰值,可以看出时延估计法估计的扰动相较真实的扰动存在一定的滞后。图8为USV实际控制输入曲线,可以看出该控制输入在相邻采样周期内零阶保持,USV纵向推力在100s内完成收敛,转艏力矩在30s内完成收敛。由于采用滑模控制导致USV控制输入存在一定抖振。