连发施夹钳
文献发布时间:2023-06-19 13:46:35
技术领域
本发明属于医疗器械技术领域,尤其涉及一种连发施夹钳。
背景技术
施夹钳是一种手术器械,用于在外科手术中对组织夹进行夹闭操作。但现有技术中的施夹钳大都为单发的施加钳,即每完成一次施夹后要重新在钳头处安装组织夹,这样就导致手术效率较低。
针对这一问题,人们在长期的生产生活实践中也进行了探索研究,例如,中国实用新型专利公开了一种连发施夹钳[申请号:201820962819.X],该实用新型专利包括推动手柄、管杆以及装于管杆前端的钳头,其特征在于,还包括由推动手柄带动的推拉杆、送料装置和储料舱,所述储料舱具有与钳头活动连接的前端和与前端相对的后端,所述推拉杆的一端连接于推动手柄,另一端与储料舱的后端连接并作用于储料舱,使钳头张开或夹紧,所述送料装置包括传动件和用于驱动传动件移动的驱动件,所述储料舱内置有多个用于夹紧血管的夹子,所述传动件伸入于储料舱以推动夹子进入钳头内。
但在实际使用过程中发现,这种施夹钳只能较好适用于金属材质的组织夹,例如钛夹,这是因为金属形变后可对形状进行自保持,而塑料材质的组织夹在顶出至施夹钳钳头位置时会有一个大幅度的自动弹开动作,这给医护人员手术操作时带来不便。
发明内容
本发明的目的是针对上述问题,提供一种可实现分步进给连续施夹的连发施夹钳。
为达到上述目的,本发明采用了下列技术方案:
一种连发施夹钳,包括施夹钳壳体,钳头推杆连接在施夹钳壳体上且钳头推杆的一端设有钳头,移动所述钳头推杆可带动钳头张开或夹紧,所述施夹钳壳体上设有弹夹安装结构,用于容纳至少两个组织夹的弹夹组件安装在弹夹安装结构上,所述钳头推杆远离钳头的一端连接有推进结构,转动连接在施夹钳壳体上的驱动手柄与推进结构之间还设有第一进给机构和第二进给机构,所述驱动手柄通过第一进给机构推动推进结构进入第一进给空间内,所述驱动手柄通过第二进给机构推动推进结构进入第二进给空间内,所述驱动手柄的一侧设有与驱动手柄驱动连接的异形凸轮,所述异形凸轮上设有异形凹槽,所述异形凹槽由若干段与异形凸轮的转动中心距离不相同的弧段组成,还包括设置在施夹钳壳体内用于推动组织夹的组织夹推进结构,所述异形凸轮与组织夹推进结构之间设有传动组件,所述传动组件一端滑动连接在异形凹槽内,另一端转动连接在组织夹推进结构上。
在上述的连发施夹钳中,所述第一进给机构包括固定连接在驱动手柄上的第一推动块和连接在推进结构上的第一推动组件,转动驱动手柄可使第一推动块压设在第一推动组件上,所述第一推动组件包括固定连接在推进结构上的安装座和第一受力推块,所述第一受力推块一端转动连接在安装座上,另一端向靠近驱动手柄的方向延伸,扭簧套设在第一受力推块上。
在上述的连发施夹钳中,所述第二进给机构包括固定连接在驱动手柄上的第二推动块和固定连接在推进结构上的第二受力推块,转动驱动手柄可使第二推动块压设在第二受力推块上,所述第一推动组件较第二受力推块更靠近钳头,所述第一推动块较第二推动块更靠近钳头,且第一推动块与第二推动块之间的距离大于第一推动组件与第二受力推块之间的距离。
在上述的连发施夹钳中,所述异形凹槽包括依次连通的第一弧段、第二弧段和第三弧段;
所述第一弧段在以异形凸轮转动中心为圆心的圆的圆弧上投影的弧度为20-40度,第一弧段的两端在以异形凸轮转动中心为圆心的圆的径向方向上投影的距离之差为10mm以下;
所述第二弧段在以异形凸轮转动中心为圆心的圆的圆弧上投影的弧度为10-30度,第二弧段的两端在以异形凸轮转动中心为圆心的圆的径向方向上投影的距离之差为20mm以下;
所述第三弧段在以异形凸轮转动中心为圆心的圆的圆弧上投影的弧度为30-50度,第三弧段的两端在以异形凸轮转动中心为圆心的圆的径向方向上投影的距离之差为10mm以下。
在上述的连发施夹钳中,还包括用于防止夹子误夹的保险组件,所述保险组件的一端延伸至第一进给机构和/或第二进给机构内,所述保险组件包括框架和连接在框架上的保险传动组件,所述保险传动组件的一端连接有操作按钮,另一端连接有锁舌,所述操作按钮通过保险传动组件与锁舌驱动连接,移动锁舌可使锁舌的一端延伸至第二进给机构内,所述保险传动组件包括一端转动连接在框架上,另一端插入至操作按钮内的摆臂,还包括与框架滑动连接的滑块,转动摆臂可使摆臂压设在滑块上,所述锁舌固定连接在滑块的一端,所述滑块远离锁舌的一端压设有复位弹簧,所述复位弹簧的另一端压设在保险传动组件上。
在上述的连发施夹钳中,所述传动组件包括第一传动片和第二传动片,所述第一传动片上固定设置有第一销轴和第二销轴,第一传动片上还设有贯通第一传动片的导向通孔,所述第二传动片一端通与第一传动片转动连接,另一端与组织夹推进结构转动连接,第二传动片上还固定设置有第三销轴,所述第三销轴同时滑动连接在导向通孔和异形凹槽内。
在上述的连发施夹钳中,所述弹夹安装结构包括外骨架,所述外骨架内设有用于容纳弹夹组件的弹夹腔,外骨架的一端设有与弹夹腔相连通的插入口,还包括设置在外骨架外且沿外骨架长度方向延伸的外推杆组件,所述外推杆组件一端连接在组织夹推进结构上,所述驱动手柄与组织夹推进结构驱动连接,所述组织夹推进结构推动外推杆组件发生沿外骨架长度方向的往复运动,所述外骨架上设有贯通外骨架侧壁的推进连通孔,所述外推杆组件部分通过连通孔延伸至弹夹腔内。
在上述的连发施夹钳中,所述外推杆组件包括相互连接的杆体和扁条,所述杆体远离扁条的一端连接在组织夹推进结构上,所述扁条贴合在外骨架表面,推动凸起固定连接在扁条底面,且推动凸起通过连通孔延伸至弹夹腔内,还包括设置在外骨架上的紧固片,所紧固片一端与外骨架固定连接,另一端压设在扁条的表面上,所述紧固片和扁条均为由金属材料制得的片材。
在上述的连发施夹钳中,所述弹夹安装结构还包括与弹夹组件上的开口相配合的正反识别件,所述正反识别件位于弹夹腔内且固定连接在外骨架靠近插入口的一端,所述正反识别件包括固定连接在外骨架上的连接板体,所述连接板体的一端连接有阻挡板和识别板,阻挡板和识别板并排设置,所述阻挡板靠近插入口的一侧设有阻挡面,所述识别板靠近插入口的一侧设有识别斜面,所述识别斜面的倾斜角度小于阻挡面的倾斜角度,且识别斜面的端部较阻挡面的端部更靠近插入口。
在上述的连发施夹钳中,所述弹夹组件包括弹夹壳体,所述弹夹壳体内具有用于容纳至少两个组织夹的组织夹容纳空腔,所述弹夹壳体内还设有进给杆容纳空腔,进给杆滑动连接在进给杆容纳空腔内,所述进给杆容纳空腔与组织夹容纳空腔相互连通,且滑动进给杆可使进给杆的一端延伸至组织夹容纳空腔内,所述进给杆包括手柄和进给单元,所述手柄远离进给单元的一端延伸至进给杆容纳空腔外,所述进给单元设有若干个且首尾依次连接,所述进给单元包括进给通孔和设置在两个进给通孔之间的进给横梁。
与现有的技术相比,本发明的优点在于:
1、本发明利用第一进给机构和第二进给机构实现钳头的两步夹持,第一进给机构先完成第一步将钳头夹到一定开度,这样在组织夹被推出时,可以有效减小组织夹自动弹开动作的幅度,然后再利用第二进给机构缓缓夹持至完全闭合,故更适用于顶出时会自动弹开的组织夹。
、本发明用于驱动组织夹推进结构推动组织夹的异形凸轮上设有异形凹槽,且异形凹槽由若干段与异形凸轮的转动中心距离不相同的弧段组成,这样可以保证驱动手柄在匀速驱动的过程中组织夹推进结构可获得不同的推进速度,从而能较好的适用钳头分步夹持的动作。
、本发明设有保险组件,可在无需夹持时抵住第二进给机构,以防止误夹。
、本发明单独设置了一个可预装数个组织夹的弹夹组件在弹夹安装结构内,手术过程中可利用驱动手柄推动外推杆组件将弹夹组件内的组织夹依次顶出施夹,从而实现连续施夹,大大提高了手术效率,节省了手术时间。
、本发明将外推杆组件设置在外骨架外侧,而弹夹组件设置在外骨架内部,外推杆组件部分延伸至弹夹腔内,并通过组织夹推进结构推动往复运动以实现对弹夹组件的往复推动,从而实现连续施夹。
、本发明利用凸出扁条下表面的长度由靠近组织夹推进结构的一端向另一端逐渐变大的推动凸起实现对弹夹组件的推动,这样在外推杆组件回退时可使扁条整体被顶起,防止弹夹组件被带动回退。
、本发明在弹夹壳体底面还连接有止回弹性片,这样可保证进给杆发生回退时会被止回弹性片抵住,从而保证进给杆的顶出效率。
附图说明
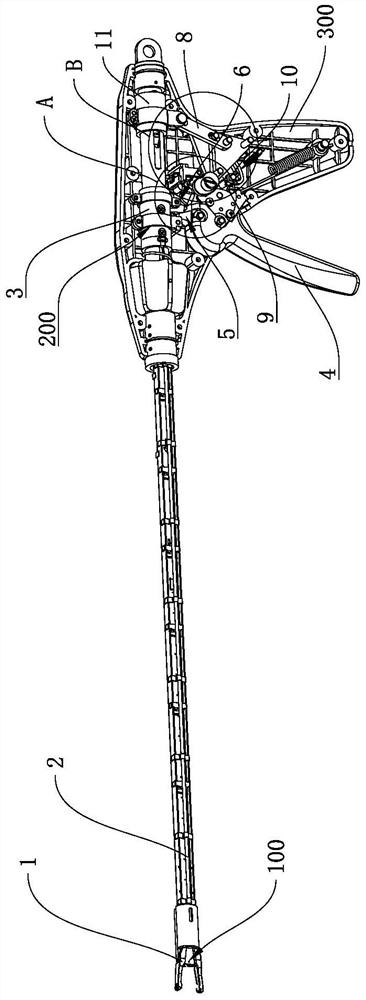
图1是本发明的结构示意图;
图2是图1中A处的放大图;
图3是异形凸轮的结构示意图;
图4是本发明部分结构的结构示意图;
图5是异形凸轮的凸轮曲线;
图6是图1中B处的放大图;
图7是第一进给机构和第二进给机构的结构示意图;
图8是保险组件的结构示意图;
图9是连发施夹机构的结构示意图;
图10是连发施夹机构的爆炸图;
图11是连发施夹机构部分结构的剖视图;
图12是弹夹组件的结构示意图;
图13是正反识别件的结构示意图;
图14是图12中C处的放大图;
图15是弹夹组件的爆炸图;
图16是第一传动片间接固定的结构示意图;
图中:钳头1、钳头推杆2、推进结构3、驱动手柄4、第一进给机构5、第二进给机构6、保险组件7、传动组件8、异形凸轮9、异形凹槽10、组织夹推进结构11、第一弧段12、第二弧段13、第三弧段14、第一推动块51、第一推动组件52、安装座53、第一受力推块54、扭簧55、倒角56、第二推动块61、第二受力推块62、操作按钮71、保险传动组件72、锁舌73、框架74、摆臂75、滑块76、复位弹簧77、第一传动片81、第二传动片82、第一销轴83、第二销轴84、导向通孔85、第三销轴86、凸轮主体91、转动连接孔92、传动齿93、驱动齿94、齿轮96、弹夹组件100、弹夹壳体101、组织夹102、组织夹容纳空腔103、进给杆容纳空腔104、进给杆105、进给单元106、手柄107、进给通孔108、横梁109、标识110、止回弹性片111、开口112、导向条113、外骨架201、外推杆组件202、连通孔203、弹夹腔204、杆体205、扁条206、推动凸起207、紧固片208、限位件209、正反识别件210、插入口211、连接板体212、阻挡板213、识别板214、阻挡面215、识别斜面216、施夹钳壳体300。
具体实施方式
下面结合附图和具体实施方式对本发明做进一步详细的说明。
如图1所示,一种连发施夹钳,包括包括施夹钳壳体300,钳头推杆2连接在施夹钳壳体300上且钳头推杆2的一端设有钳头1,移动所述钳头推杆2可带动钳头1张开或夹紧,其特征在于:所述施夹钳壳体300上设有弹夹安装结构200,用于容纳至少两个组织夹102的弹夹组件100安装在弹夹安装结构200上,所述钳头推杆2远离钳头1的一端连接有推进结构3,转动连接在施夹钳壳体300上的驱动手柄4与推进结构3之间还设有第一进给机构5和第二进给机构6,所述驱动手柄4通过第一进给机构5推动推进结构3进入第一进给空间内,所述驱动手柄4通过第二进给机构6推动推进结构3进入第二进给空间内,所述驱动手柄4的一侧设有与驱动手柄4驱动连接的异形凸轮9,所述异形凸轮9上设有异形凹槽10,所述异形凹槽10由若干段与异形凸轮9的转动中心距离不相同的弧段组成,还包括设置在施夹钳壳体300内用于推动组织夹102的组织夹推进结构11,所述异形凸轮9与组织夹推进结构11之间设有传动组件8,所述传动组件8一端滑动连接在异形凹槽10内,另一端转动连接在组织夹推进结构11上。
外力施加在驱动手柄4上,驱动手柄4发生转动从而驱动异形凸轮9发生转动,驱动异形凸轮9通过传动组件8将动力传递至组织夹推进结构11从而推动组织夹。但由于传动组件8通过异形凹槽10进行驱动,异形凹槽10又由若干段与异形凸轮9的转动中心距离不相同的弧段组成,故异形凸轮9在角速度匀速转动的过程中,传递至组织夹推进结构11后,组织夹推进结构11在直线方向上的推动速度是变速的。
驱动手柄4转动的同时还会使得第一进给机构5驱动推进结构3移动,直至推进结构3位于第一进给空间内,此时钳头1处于半闭合状态,此时驱动手柄4大约转过15度。继续扳动驱动手柄4,驱动手柄4大约转过25度时,钳头1重新打开,再扳动驱动手柄4,使得第二进给机构6驱动推进结构3移动,直至推进结构3位于第二进给空间内,此时钳头1处于夹紧状态,此时驱动手柄4大约转过42度。
结合图2-5所示,所述异形凹槽10包括依次连通的第一弧段12、第二弧段13和第三弧段14;所述传动组件8包括第一传动片81和第二传动片82,所述第一传动片81上固定设置有第一销轴83和第二销轴84,优选地,第一销轴83设置在异形凸轮9的转动中心位置,以确保驱动过程的稳定。再结合图16所示,第一传动片81也可采用通过两侧的联轴板间接固定在弹夹壳体101上的连接方式。第一传动片81上还设有贯通第一传动片81的导向通孔85,所述第二传动片82一端通与第一传动片81转动连接,另一端与组织夹推进结构11转动连接,第二传动片82上还固定设置有第三销轴86,所述第三销轴86同时滑动连接在导向通孔85和异形凹槽10内。所述第一弧段12在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为20-40度,第一弧段12的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为10mm以下;所述第二弧段13在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为10-30度,第二弧段13的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为20mm以下;所述第三弧段14在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为30-50度,第三弧段13的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为10mm以下。
即在驱动过程中,异形凸轮9转动过20-40度后,第三销轴86脱离第一弧段12,进入第二弧段13,此时第三销轴86沿导向通孔85移动了小于或等于5mm的距离。异形凸轮9继续转动过10-30度后,第三销轴86脱离第二弧段13,进入第三弧段14,此时第三销轴86沿导向通孔85移动了20mm以下的距离。异形凸轮9继续转动过30-50度后,第三销轴86沿第三弧段14滑动至压设在异形凸轮9上,此时第三销轴86沿导向通孔85移动了小于或等于5mm的距离。
优选地,所述第一弧段12在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为30度,第一弧段12的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为0.75mm;所述第二弧段13在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为20度,第二弧段13的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为3.75mm;所述第三弧段14在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为40度,第三弧段14的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为0.25mm。即达到如图5所示的凸轮曲线,此时钳头夹持和组织夹推进两个动作处于最适配状态。
结合图3和图4所示,所述异形凸轮9包括凸轮主体91和设置在凸轮主体91上的转动连接孔92,所述凸轮主体91远离异形凹槽10的一侧设有传动齿93,所述凸轮主体91通过传动齿93与驱动手柄4驱动连接。所述驱动手柄4靠近异形凸轮9的一侧设有驱动齿94,所述驱动齿94与传动齿93之间设有齿轮96,所述齿轮96的两侧分别与驱动齿94和传动齿93相啮合。驱动手柄4通过传动齿93、齿轮96和驱动齿94将动力传递至凸轮主体91上。
结合图1和图6所示,一种应用于连发施夹钳的分步进给机构,包括钳头1和一端连接在钳头1上的钳头推杆2,移动所述钳头推杆2可带动钳头1张开或夹紧,钳头推杆2和钳头1可采用现有技术中施夹钳常用的连接方式进行连接,以实现控制钳头1的启闭动作。所述钳头推杆2远离钳头1的一端连接有推进结构3,驱动手柄4与推进结构3之间还设有第一进给机构5和第二进给机构6,所述驱动手柄4通过第一进给机构5推动推进结构3进入第一进给空间内,所述驱动手柄4通过第二进给机构6推动推进结构3进入第二进给空间内。第一进给空间与第二进给空间即推进结构3在第一步进给后和第二步进给后的所在空间。
使用时,扳动驱动手柄4,使得第一进给机构5驱动推进结构3移动,直至推进结构3位于第一进给空间内,此时钳头1处于半闭合状态,此时驱动手柄4大约转过15度。继续扳动驱动手柄4,驱动手柄4大约转过25度时,钳头1重新打开,再扳动驱动手柄4,使得第二进给机构6驱动推进结构3移动,直至推进结构3位于第二进给空间内,此时钳头1处于夹紧状态,此时驱动手柄4大约转过42度。故本发明利用第一进给机构5和第二进给机构6实现钳头1的两步夹持,第一进给机构5先完成第一步将钳头1夹到一定开度,这样在组织夹被推出时,可以有效减小组织夹自动弹开动作的幅度,然后再利用第二进给机构6缓缓夹持至完全闭合,故更适用于顶出时会自动弹开的组织夹。
具体的说,所述第一进给机构5位于第二进给机构6的前端,转动所述驱动手柄4,第一进给机构5先于第二进给机构6推动推进结构3。这样的结构设计较为合理,便于第一进给机构5先完成第一步的驱动,在利用第二进给机构6完成第二步的驱动。再结合图5所示,所述第一进给机构5推动推进结构3时,所述驱动手柄4转过的角度为0-14度,当驱动手柄4转过的角度为15度时,所述第一进给机构5完成对推进结构3的推动;所述第二进给机构6推动推进结构3时,所述驱动手柄4转过的角度为25-41度,当驱动手柄4转过的角度为42度时,所述第二进给机构6完成对推进结构3的推动。
结合图6和图7所示,所述第一进给机构5包括固定连接在驱动手柄4上的第一推动块51和连接在推进结构3上的第一推动组件52,转动驱动手柄4可使第一推动块51压设在第一推动组件52上。使用时通过转动驱动手柄4,使得第一推动块51压设至第一推动组件52上,从而推动推进结构3。转过一定角度后,由于推进结构3前移以及第一推动块51的角度变化,使得第一推动块51与第一推动组件52之间的距离变大,第一推动块51与第一推动组件52相互脱离,此时第一步的进给完成。
具体的说,所述第一推动组件52包括固定连接在推进结构3上的安装座53和第一受力推块54,所述第一受力推块54一端转动连接在安装座53上,另一端向靠近驱动手柄4的方向延伸,扭簧55套设在第一受力推块54上。这样在施加较大的力时可使得第一受力推块54发生翻转,便于夹持完成后,第一推动块51从第一受力推块54的前端回复到第一受力推块54的后端。
优选地,所述第一受力推块54靠近第一推动块51一侧的底部设有呈圆弧形的倒角56。
结合图6和图7所示,所述第二进给机构6包括固定连接在驱动手柄4上的第二推动块61和固定连接在推进结构3上的第二受力推块62,转动驱动手柄4可使第二推动块61压设在第二受力推块62上。在第一步进给完成后,第二推动块61压设至第二受力推块62上,推动推进结构3进行第二步进给。
优选地,所述第一推动组件52较第二受力推块62更靠近钳头1,所述第一推动块51较第二推动块61更靠近钳头1,且第一推动块51与第二推动块61之间的距离大于第一推动组件52与第二受力推块62之间的距离。
结合图6-7所示,还包括用于防止夹子误夹的保险组件7,所述保险组件7的一端延伸至第一进给机构5和/或第二进给机构6内。本发明设有保险组件7,可在无需夹持时抵住第二进给机构6,以防止误夹。
具体的说,所述保险组件7包括框架74和连接在框架74上的保险传动组件72,所述保险传动组件72的一端连接有操作按钮71,另一端连接有锁舌73,所述操作按钮71通过保险传动组件72与锁舌73驱动连接,移动锁舌73可使锁舌73的一端延伸至第二进给机构6内,所述保险传动组件72包括一端转动连接在框架74上,另一端插入至操作按钮71内的摆臂75,还包括与框架74滑动连接的滑块76,转动摆臂75可使摆臂75压设在滑块76上,所述锁舌73固定连接在滑块76的一端,所述滑块76远离锁舌73的一端压设有复位弹簧77,所述复位弹簧77的另一端压设在保险传动组件72上。
需防止误夹时,锁舌73延伸至第二推动块61与第二受力推块62之间,这样转动驱动手柄4时,第二推动块61会压设在锁舌73底面被卡死而无法推动第二受力推块62。手术过程中需正常使用时,按压操作按钮71,操作按钮71带动摆臂75摆动,摆臂75一端压设在滑块76,滑块76带动锁舌73发生同步的远离第二进给机构6的滑动,此时复位弹簧77被压缩。
结合图1、图9和图10所示,包括安装在施夹钳壳体300上的弹夹安装结构200,所述弹夹安装结构200包括弹夹腔204和外推杆组件202,可容纳至少两个组织夹102的弹夹组件100设置在弹夹腔204内,所述外推杆组件202一部分延伸至弹夹腔204内并压设在弹夹组件100上,所述施夹钳壳体300上转动连接有驱动手柄4,所述驱动手柄4与外推杆组件202驱动连接,转动驱动手柄4,驱动手柄4推动推动外推杆组件202发生沿弹夹组件100长度方向的往复运动。
具体的说,所述弹夹安装结构200包括外骨架201,所述外骨架201内设有用于容纳弹夹组件100的弹夹腔204,外骨架201的一端设有与弹夹腔204相连通的插入口211,还包括设置在外骨架201外且沿外骨架201长度方向延伸的外推杆组件202,所述外推杆组件202一端连接在组织夹推进结构11上,所述驱动手柄4与组织夹推进结构11驱动连接,所述组织夹推进结构11推动外推杆组件202发生沿外骨架201长度方向的往复运动,所述外骨架201上设有贯通外骨架201侧壁的推进连通孔203,所述外推杆组件202部分通过连通孔203延伸至弹夹腔204内。
使用时,弹夹组件100安装至弹夹腔204内,转动驱动手柄4驱动组织夹推进结构11,从而使得组织夹推进结构11推动外推杆组件202发生沿外骨架201长度方向的往复运动,进而外推杆组件202将弹夹组件100内的组织夹依次推出,实现连续施夹。故本发明将外推杆组件202设置在外骨架201外侧,而弹夹组件100设置在外骨架201内部,外推杆组件202部分延伸至弹夹腔204内,并通过组织夹推进结构推动往复运动以实现对弹夹组件的往复推动,从而实现连续施夹。
如图11所示,所述外推杆组件202包括相互连接的杆体205和扁条206,所述杆体205远离扁条206的一端连接在组织夹推进结构11上,所述扁条206贴合在外骨架201表面,推动凸起207固定连接在扁条206底面,且推动凸起207通过连通孔203延伸至弹夹腔204内。其中,所述杆体205呈圆柱形,所述扁条206呈方形,杆体205与扁条206的端部相互抵靠。
呈圆柱形的杆体205便于安装连接至组织夹推进结构11上,呈方形的扁条206贴合在外骨架201表面可有效防止推进过程中发生周向转动,保证推动的稳定性。
优选地,还包括设置在外骨架201上的紧固片208,所紧固片208一端与外骨架201固定连接,另一端压设在扁条206的表面上。这样给扁条206施加一定的力,使得扁条206能更好的服帖在外骨架201表面。
结合图11和图12所示,所述推动凸起207的凸出扁条206下表面的长度由靠近组织夹推进结构11的一端向另一端逐渐变大。例如,推动凸起207的横截面可以呈一个三角形。本发明利用凸出扁条206下表面的长度由靠近组织夹推进结构的一端向另一端逐渐变大的推动凸起207实现对弹夹组件100的推动,这样在外推杆组件202回退时可使扁条206整体被顶起,防止弹夹组件100被带动回退。
使用时,弹夹组件100内部用于推动组织夹的推杆结构可采用如图5所示的类似楼梯状的结构,即一个个依次连接的进给单元106结构。组织夹推进结构11推动杆体205从而推动扁条206沿外骨架201的长度方向往复移动。向前移动时,推动凸起207延伸至弹夹腔204内并压设在横梁109侧面,从而推动弹夹组件100内的进给杆105。推出一个组织夹102进行施夹后,组织夹推进结构11带动扁条206后移。此时推动凸起207的端部斜面压设在后一个进给单元106的横梁109上而被顶起,扁条206整体也克服紧固片208的压力产生形变,被顶起,直至推动凸起207重新卡入后一个进给单元106中,为下一次推动做好准备。重复上述过程,可实现连续施夹。
优选地,所述紧固片208和扁条206均为由金属材料制得的片材。这样可使得紧固片208和扁条206均具有一定的弹性,能够施加压力,需要时可以发生形变被顶起。
如图9所示,还包括设置在外骨架201上的限位件209,所述外推杆组件202贯通过限位件209,所述限位件209设置有至少两个,且每个限位件209之间相互平行。
结合图11和图13所示,还包括与弹夹组件100上的开口112相配合的正反识别件210,所述正反识别件210位于弹夹腔204内且固定连接在外骨架201靠近插入口211的一端。正反识别件210可保证弹夹组件100由正确的方向插入至插入口211内。
具体的说,所述正反识别件210包括固定连接在外骨架201上的连接板体212,所述连接板体212的一端连接有阻挡板213和识别板214,阻挡板213和识别板214并排设置,所述阻挡板213靠近插入口211的一侧设有阻挡面215,所述识别板214靠近插入口211的一侧设有识别斜面216,所述识别斜面216的倾斜角度小于阻挡面215的倾斜角度,参照图6所示,阻挡面215设计为倾斜度较大的面,优选为垂直连接板体212的表面,能更有效的起到阻挡的作用。且识别斜面216的端部较阻挡面215的端部更靠近插入口211。
使用时,由于弹夹组件100一面具有开口112,一面不具有,故当弹夹组件100具有开口112的一面正对正反识别件210插入时,具有识别斜面216的识别板214会嵌入开口112内,继续滑动则开口112侧边的结构会压设在阻挡面215上,从而无法继续插入。反之当弹夹组件100不具有开口112的一面正对正反识别件210插入时,弹夹组件100会率先接触识别斜面216,由于识别斜面216倾斜程度较小,弹夹组件100可沿识别斜面216滑动并将正反识别件210整体下压,从而不会触碰到阻挡面215以便于顺利插入。
结合图12和图15所示,所述弹夹组件100包括弹夹壳体101,所述弹夹壳体101内具有用于容纳至少两个组织夹102的组织夹容纳空腔103,所述弹夹壳体101内还设有进给杆容纳空腔104,进给杆105滑动连接在进给杆容纳空腔104内,所述进给杆容纳空腔104与组织夹容纳空腔103相互连通,且滑动进给杆105可使进给杆105的一端延伸至组织夹容纳空腔103内。
使用时,数个组织夹102预装至组织夹容纳空腔103内后,弹夹整体安装至施夹钳中,驱动进给杆105使得进给杆105发生相对弹夹壳体101的滑动,从而延伸至组织夹容纳空腔103内以推动组织夹102,实现组织夹102依次被推出,进而实现连续施夹。故本发明可在组织夹容纳空腔103内预安装数个组织夹102,手术过程中可利用进给杆105进行依次顶出施夹,从而实现连续施夹,大大提高了手术效率,节省了手术时间。
优选地,所述进给杆容纳空腔104的长度大于组织夹容纳空腔103的长度。这样能保证进给杆105将预装的全部组织夹102推出完成施夹。
结合图12、图14和图15所示,所述进给杆105包括手柄107和进给单元106,所述手柄107远离进给单元106的一端延伸至进给杆容纳空腔104外,以方便弹夹整体的安装。所述进给单元106设有若干个且首尾依次连接。
优选地,每个进给单元106的长度均与组织夹102的长度相同。这样每推进一个进给单元106的长度即可恰好推出一个组织夹102以完成施夹。
具体的说,所述进给单元106包括进给通孔108和设置在两个进给通孔108之间的进给横梁109。使用时,施夹钳上的推进机构通过延伸至进给通孔108内推动进给横梁109,从而整体推动进给杆105。
如图12所示,所述进给杆105的两侧分别与弹夹壳体101的两个内侧壁相贴合。这样弹夹壳体101可以起到一个导向的作用,防止进给杆105发生左右的摇摆。
如图15所示,所述弹夹壳体101上还设有在弹夹安装时用于指向安装方向的标识110。其中,所述标识110为贯通弹夹壳体101底面且呈箭头形状的通孔。这样可以方便将弹夹安装入施夹钳时辨别安装方向。
如图15所示,所述进给杆105靠近组织夹102的一端还固定连接有导向条113,所述导向条113的一端延伸至组织夹容纳空腔103内,所述组织夹102侧面设有凸起,所述凸起压设在导向条113上。导向条113可以是钢丝,目的是保证组织夹102在弹夹壳体101内位置的稳定与一致性。
如图14所示,所述弹夹壳体101底面还连接有止回弹性片111,所述止回弹性片111一端固定连接在弹夹壳体101底面上,另一端为自由端且向进给杆容纳空腔104内延伸,止回弹性片111的自由端较固定端更靠近组织夹102。本发明在弹夹壳体101底面还连接有止回弹性片111,这样可保证进给杆105发生回退时会被止回弹性片111抵住,从而保证进给杆105的顶出效率。
如图15所示,所述弹夹壳体101下表面封闭,上表面具有呈条形的开口112,所述开口112与组织夹容纳空腔103及进给杆容纳空腔104均相连通。这样可以通过与正反识别件210相配合以区分安装至施夹钳内时弹夹组件100的正反方向,便于安装。
本发明的工作原理是:使用时,先将数个组织夹102预装至组织夹容纳空腔103内后,完成弹夹组件100的预装。再将弹夹组件100通过插入口211经正反识别件210识别后正确安装至弹夹腔204内,弹夹组件100内部用于推动组织夹的推杆结构可采用如图5所示的类似楼梯状的结构,即一个个依次连接的进给单元106结构。按压操作按钮71,操作按钮71带动摆臂75摆动,摆臂75一端压设在滑块76,滑块76带动锁舌73发生同步的远离第二进给机构6的滑动,此时复位弹簧77被压缩。再扳动驱动手柄4,使得第一推动块51压设至第一推动组件52上,从而推动推进结构3。转过一定角度后,由于推进结构3前移以及第一推动块51的角度变化,使得第一推动块51与第一推动组件52之间的距离变大,第一推动块51与第一推动组件52相互脱离,此时第一步的进给完成,此时钳头1处于半闭合状态,此时驱动手柄4大约转过15度。继续扳动驱动手柄4,驱动手柄4大约转过25度时,钳头1重新打开,再扳动驱动手柄4,第二推动块61压设至第二受力推块62上,推动推进结构3进行第二步进给,此时钳头1处于夹紧状态,此时驱动手柄4大约转过42度。与此同时,驱动手柄4发生转动而驱动异形凸轮9发生转动,异形凸轮9转动过20-40度后,第三销轴86脱离第一弧段12,进入第二弧段13,此时第三销轴86沿导向通孔85移动了小于或等于5mm的距离。异形凸轮9继续转动过10-30度后,第三销轴86脱离第二弧段13,进入第三弧段14,此时第三销轴86沿导向通孔85移动了20mm以下的距离。异形凸轮9继续转动过30-50度后,第三销轴86沿第三弧段14滑动至压设在异形凸轮9上,此时第三销轴86沿导向通孔85移动了小于或等于5mm的距离。第三销轴86沿导向通孔85的滑动过程中会带动组织夹推进结构11沿直线运动。故异形凸轮9在角速度匀速转动的过程中,传递至组织夹推进结构11后,组织夹推进结构11在直线方向上的推动速度是变速的。组织夹推进结构11在上述的推动过程中,会同步的推动杆体205从而推动扁条206沿外骨架201的长度方向往复移动。向前移动时,推动凸起207延伸至弹夹腔204内并压设在横梁109侧面,从而推动弹夹组件100内的进给杆105。推出一个组织夹102进行施夹后,组织夹推进结构11带动扁条206后移。此时推动凸起207的端部斜面压设在后一个进给单元106的横梁109上而被顶起,扁条206整体也克服紧固片208的压力产生形变,被顶起,直至推动凸起207重新卡入后一个进给单元106中,为下一次推动做好准备。重复上述过程,可实现连续施夹。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
尽管本文较多地使用了钳头1、钳头推杆2、推进结构3、驱动手柄4、第一进给机构5、第二进给机构6、保险组件7、传动组件8、异形凸轮9、异形凹槽10、组织夹推进结构11、第一弧段12、第二弧段13、第三弧段14、第一推动块51、第一推动组件52、安装座53、第一受力推块54、扭簧55、倒角56、第二推动块61、第二受力推块62、操作按钮71、保险传动组件72、锁舌73、框架74、摆臂75、滑块76、复位弹簧77、第一传动片81、第二传动片82、第一销轴83、第二销轴84、导向通孔85、第三销轴86、凸轮主体91、转动连接孔92、传动齿93、驱动齿94、齿轮96、弹夹组件100、弹夹壳体101、组织夹102、组织夹容纳空腔103、进给杆容纳空腔104、进给杆105、进给单元106、手柄107、进给通孔108、横梁109、标识110、止回弹性片111、开口112、导向条113、外骨架201、外推杆组件202、连通孔203、弹夹腔204、杆体205、扁条206、推动凸起207、紧固片208、限位件209、正反识别件210、插入口211、连接板体212、阻挡板213、识别板214、阻挡面215、识别斜面216、施夹钳壳体300等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
- 连发施夹钳和连发施夹钳送料装置
- 应用于连发施夹钳的连发施夹机构