路径规划方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明是有关于一种载具的移动路径的规划方法,且特别适用于无法原地回转的载具。
背景技术
无人载具例如自动堆高机或自动货车,可用来运送货物。以自动堆高机为例,自动堆高机的相对于其车头的一侧(车尾)具有「货叉」结构。透过将自动堆高机的货叉插入栈板的底部或自栈板的底部移出,可以完成货物的装载、运送及卸除。自动堆高机因其动力及感测系统的设计,适于以车头朝前的方式行进,并需要在行走路径中回转使货叉朝前,以方便进行接下来的装载或卸除货物的动作。需说明的是,自动堆高机无法原地回转,而是要透过行进来回转(如同一般汽车)而改变货叉的朝向。
在计算自动堆高机的行走路径时,通常会使用时间弹性带法(Timed ElasticBand,TEB)或是动态窗格法(Dynamic Window Approach,DWA)。以时间弹性带法来说,可以依据起始位置与目标位置来计算出多种路径,并从中决定一条预设路径,以使自动堆高机沿预设路径移动。并且,自动堆高机会在预设路径上的任意位置进行回转。
然而,时间弹性带法为确保车头角度与所载货物皆能够平滑地移动,因此当预设路径过长时,自动堆高机会因为会在预设路径上的回转动作,使得车体偏离预设路径且无法预期其偏离的程度。在上述情形下可能发生意外事件。若是动态窗格法,则需要记忆全部的决策点坐标,无法用于复杂度较高的自走载具。
因此,需要针对自动堆高机以及其他有回转需求的无人载具提出一种可以满足回转需求且避免路径偏移的解决方案。
发明内容
本发明提供一种路径规划方法,可以满足无人载具的回转需求且避免载具的移动路径偏移。
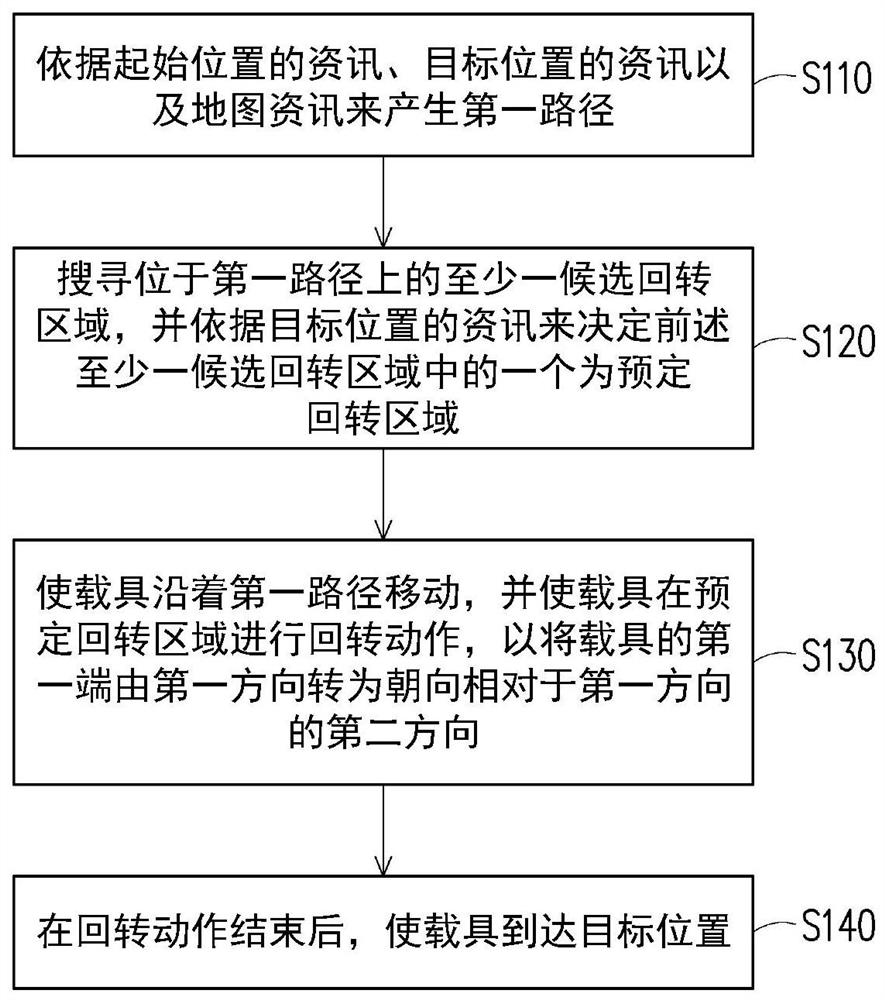
本发明的路径规划方法,适用于载具。该路径规划方法包括:依据起始位置的资讯、目标位置的资讯以及地图资讯来产生第一路径;搜寻位于第一路径上的至少一候选回转区域,并依据目标位置的资讯来决定至少一候选回转区域中的一个作为预定回转区域,其中各候选回转区域的中间点与目标位置之间的距离大于或等于载具的回转半径;使载具沿着第一路径移动,并使载具在预定回转区域进行回转动作,以将载具的第一端由第一方向转为朝向相对于第一方向的第二方向;以及在回转动作结束后,使该载具到达该目标位置或使载具由预定回转区域移动至目标位置。
基于上述,本发明可以预先设定载具最佳的回转位置以及确保载具有足够的回转空间。由于载具在到达预定回转区域之前皆不需要调整头向,因此并不会有多余的横向移动发生。
附图说明
图1绘示为本发明一实施例的路径规划方法的步骤流程图。
图2绘示为载具的移动路径及在预定回转区域进行回转的示意图。
图3A~3E绘示为本发明一实施例的候选回转区域的产生过程的示意图。
图4绘示为本发明一实施例的多个候选回转区域的示意图。
图5绘示为本发明一实施例的载具的避障操作的示意图。
图6绘示为本发明一实施例的路径规划方法的步骤流程图。
具体实施方式
图1绘示为本发明一实施例的路径规划方法的步骤流程图。图2绘示为载具的移动路径及在预定回转区域进行回转的示意图。请见图1及图2,本发明路径规划方法适用于载具AMV(例如为autonomous mobile vehicle、autonomous mobile robot或automaticguided vehicle等无人载具)。前述载具AMV是指无人载具,例如堆高机或其他类似的载具。载具AMV可以向前或向后移动,但由于转向角度及回转半径r的限制,载具AMV无法在原地进行回转。步骤S110是由运算装置(图未示)依据载具AMV的起始位置x3的资讯、载具AMV的目标位置x4的资讯以及地图资讯来产生第一路径P1。特别说明的是,第一路径P1为载具AMV行进的路线,因此以第一路径P1为中心向两侧延伸至少大于载具AMV的车身宽度的范围内不会有障碍物。
更详细一点来说,运算装置可以设置在载具AMV上或设于一外部设备中(图未示)并透过例如无线方式来与载具AMV交换信息。运算装置可以接收载具AMV本身的运动相关参数、起始位置x3的资讯、目标位置x4的资讯以及地图资讯来进行运算以产生第一路径P1。运动相关参数包括但不限于载具AMV的回转半径r的资讯、车宽及车长等尺寸资讯、线速度限制资讯、角速度限制资讯、载具重量资讯、载具AMV的机构或零件的位置资讯以及定位容许精度资讯。起始位置x3通常是指载具的当前位置。起始位置x3的资讯包括但不限于全球定位系统(Global Positioning System,GPS)的坐标资讯以及指示相对于前述地图的位置的资讯。地图资讯包括但不限于数字形式的地图图档、可行走空间的资讯、禁止行走空间的资讯、膨胀区图档(例如沿行进方向且宽度为2倍车身宽度所形成的范围)以及碰撞区图档。
另外,运算装置例如是中央处理单元(central processing unit,CPU),或是其他可编程的一般用途或特殊用途的微处理器(Microprocessor)、数字信号处理器(DigitalSignal Processor,DSP)、可编程控制器、特殊应用集成电路(Application SpecificIntegrated Circuits,ASIC)、可编程逻辑装置(Programmable Logic Device,PLD)或其他类似装置或这些装置的组合。在本实施例中,运算装置可以使用时间弹性带法来决定第一路径。在另一实施例中,运算装置可以使用动态窗格法来决定第一路径。第一路径的数据形式包括但不限于笛卡尔坐标(Cartesian Coordinate)、欧拉角(Euler Angle)以及四元数(quaternion)。
步骤S120是由运算装置搜寻位于第一路径P1上的至少一候选回转区域R,并依据目标位置x4的资讯来决定前述至少一候选回转区域R中的一个为预定回转区域RR。各候选回转区域R的中间点C与目标位置x4之间的距离大于或等于载具AMV的回转半径r。此处的「中间点」可以视为候选回转区域R在第一路径P1上的中间位置。也就是说,预定回转区域RR的中间点与目标位置x4之间的距离也是大于或等于载具AMV的回转半径r。步骤S130是使载具AMV沿着第一路径P1移动,并使载具AMV在预定回转区域RR进行回转动作(在预定回转区域R中,载具AMV进行回转动作,不会沿着第一路径P1移动),以将载具AMV的第一端AMV1由第一方向A1转为朝向相对于第一方向A1的第二方向A2。特别说明的是,本发明所述的回转动作是指载具AMV借由前进转向及后退转向的结合动作完成。下面将以附图来说明预定回转区域RR与回转半径r之间的关系。
请见图2,载具AMV沿第一路径P1移动,并在进入预定回转区域RR(即载具AMV行进到回转开始点x1)时,离开第一路径P1并朝第一路径P1的左侧行进(前进转向)。然而,由于载具AMV的转向角度的限制,载具AMV实际行进路线会如图2所示,往左斜前方曲线前进,直至载具AMV的前进方向垂直于第一路径P1或载具AMV的货叉垂直于第一路径P1。接着,载具AMV以货叉朝前的方式(后退转向),经过回转结束点x2返回第一路径P1。请回到图1,步骤S140是在回转动作结束后,载具AMV到达目标位置x4或使载具AMV由预定回转区域RR移动至目标位置x4。详细而言,若目标位置x4相对于预定回转区域RR尚有一段距离,亦即,预定回转区域RR的中间点与目标位置x4的距离大于载具AMV的回转半径r(回转结束点x2并非目标位置x4),则载具AMV接着由预定回转区域RR(例如回转结束点x2)移动至目标位置x4。但是在回转结束点x2即目标位置x4的情况下,亦即,预定回转区域RR的中间点与目标位置x4的距离等于载具AMV的回转半径r,则载具AMV即到达目标位置x4,在此情况下,则直接完成步骤S140。下面将搭配图3A~3E来说明如何搜寻位于第一路径P1上的至少一候选回转区域R。
图3A~3E绘示为本发明一实施例的候选回转区域的产生过程的示意图。请见图2及图3A,首先由地图资讯取得地图图档300以及依相关资讯所产生的第一路径P1,其中,x3表示起始位置,x4表示目标位置。请见图3B,接着由运算装置建立一张与地图图档300相同尺寸的空白图档,并在其中产生以第一路径P1为中心向两侧分别延伸宽度L的一个范围,以获得包含回转需求空间资讯的回转空间图档310。其中,宽度L为载具AMV执行回转动作时,在垂直于第一路径P1上的所需距离,例如宽度L可等于或大于载具AMV的载具长度(例如1倍或1.5倍),或者宽度L可等于或大于载具AMV的回转半径r(例如1倍或1.5倍)。在本实施例中,运算装置可以将该范围的像素值设为1,而其余像素值为0。在图3C中,运算装置由地图图档300取得与地图图档300相同尺寸的障碍物图档320,其中障碍物图档320包含静态障碍物资讯,障碍物图档320的深色区域D的像素值被设为1(其余的像素值被设为0)。深色区域D表示为障碍物区,即无法供载具行走的区域,例如固定建物、货架等。
请见图3D,经由地图资讯取得的地图图档300,再由运算装置依据回转空间图档310以及障碍物图档320进行运算,以产生包含有载具AMV可移动空间的载具移动空间资讯的图档330。详细而言,在本实施例中,运算装置可以对回转空间图档310以及障碍物图档320进行及(AND)运算。例如,对回转空间图档310以及障碍物图档320中对应位置的各像素值进行及运算,若两者皆为1则输出像素值为1(在图3D中以灰色绘示),其余则输出像素值为0,借此获得包含有载具AMV可移动空间的载具移动空间资讯的图档330。意即,在图档330中,灰色区域即为以第一路径P1为中心向两侧分别延伸宽度L的范围内不可行经的区域。
请见图3A及图3E,运算装置将包含载具移动空间资讯的图档330沿第一路径P1的行进方向A切分为多个区段S,以获得各区段S在第三方向A3上的宽度资讯。其中,第三方向A3垂直于行进方向A,每一区段S沿第一路径P1具有第一长度L1。详细而言,针对各别的区段S,运算装置可以对在以第一路径P1为中心向两侧分别延伸宽度L的左侧(上侧)范围及右侧(下侧)范围内的像素值进行判断,若各区段S向左侧延伸宽度L或向右侧延伸宽度L的范围中的所有像素值皆为0,则运算装置将该区段S新增标记。举例来说,若各别区段S的左侧范围中的所有像素值皆为0,则运算装置将该区段S新增”1”的标记,若各别区段S的右侧范围中的所有像素值皆为0,则运算装置将该区段S新增”-1”的标记。相反地,若上述各别区段S的左侧范围及右侧范围中均有任一像素值为1的情况(例如运算装置完成该区段S的判断后,未有”1”或”-1”的标记),则运算装置将该区段S新增”0”的标记。详细而言,每一区段S的标记即代表每一区段S的宽度资讯,标记为1即代表此区段S在第一路径P1左侧宽度L的范围内未有障碍物,其宽度资讯为左侧区域大于或等于宽度L;标记为-1即代表此区段S在第一路径P1右侧宽度L的范围内未有障碍物,其宽度资讯为右侧区域大于或等于宽度L;标记为0即代表此区段S在第一路径P1的左侧宽度L及右侧宽度L的范围内均有障碍物,其宽度资讯为小于宽度L。但本发明不局限于此,在其他的实施例中,可以将每一区段S垂直于第一路径P1的宽度设定为2L(以第一路径P1为中心向两侧分别延伸宽度L),因此在进行前述标记作业时,仅需检核各区段S的左侧区域及右侧区域中是否有像素值为1即可。
进一步来说,以图3E为例,可以清楚看出在多个区段S中仅有部分区段(记做S1~S5)被标记为1,其余区段S皆被标记为0。也就是说,在图3E中仅有区段S1~S5满足以第一路径P1为中心向左侧延伸宽度L的范围内的所有像素值为0的条件。运算装置可以从目标位置x4往起始位置x3依序检视各区段S的标记结果。若存在标记为1的连续的多个区段S且其数量等于第一数量,运算装置可将前述连续的多个区段S所对应的区域列为候选回转区域R,借此获得至少一候选回转区域R;或者,若存在标记为-1的连续的多个区段S且其数量等于第一数量,运算装置可将前述连续的多个区段S所对应的区域列为候选回转区域R,借此获得至少一候选回转区域R。其中,前述第一数量等于一阈值,且阈值与载具AMV的回转半径r以及区段S的第一长度L1相关联。具体来说,阈值可以被设定为是载具AMV的2倍回转半径r除以第一长度L1的值。也就是说,各候选回转区域R在第一路径P1上的长度等于载具AMV的回转半径r的2倍,如图3E所示,在本实施例中阈值为5,即需连续5个标记为”1”的区段S才可被列为候选回转区域R,然而本发明不局限于此。在其他实施例中,阈值可以被设定为载具的2.5倍回转半径r除以第一长度L1的值,也可以是载具的3倍回转半径r除以第一长度L1的值。以图3E的例子来说,只有区段S1~S5所对应的区域可以满足上述条件。因此,运算装置将区段S1~S5所对应的区域列为候选回转区域R。另外,假如在运算装置搜寻不到任何候选回转区域R时,将产生警示资讯并回报使用者「路径错误」的相关讯息。
需说明的是,为了方便说明,图3A~3E中的第一路径P1皆以一直线来呈现,然而这并不表示本发明只能应用于直线路径。在其他实施例中,第一路径P1也可以是多线段的组合或曲线。另外,本实施例中的区段S的第一长度L1例如被设定为1公分。在其他实施例中,第一长度L1也可以依据设计者的实际需求被设计为其他长度,例如2~10公分其中之一值,而阈值也随之改变。
由于图3E仅存在一个候选回转区域R,故运算装置将该个候选回转区域R决定为预定回转区域RR,并将预定回转区域RR的起点与终点分别列为回转开始点x1与回转结束点x2。运算装置并以预定回转区域RR来切分任务。具体来说,运算装置可以定义一个任务为使载具AMV从起始位置x3移动到回转开始点x1,并定义另一个任务为使载具AMV从回转结束点x2移动到目标位置x4。
在图3A~3E的实施例当中,运算装置最终仅列出一个候选回转区域R。但是在其他未示出的实施例中,可以存在多个候选回转区域R且部分候选回转区域R位于第一路径P1的左侧,而另一部分候选回转区域R位于第一路径P1的右侧。在具有多个候选回转区域R的实施例中,运算装置分别计算多个候选回转区域R与目标位置x4之间的距离,运算装置可以选择最靠近目标位置x4的一个候选回转区域R作为预定回转区域RR,其中预定回转区域RR与该目标位置x4之间的距离小于未获选的多个候选回转区域R与目标位置x4之间的距离。或者,运算装置也可以选择最远离目标位置x4的一个候选回转区域R作为预定回转区域RR。进一步来说,多个候选回转区域R可能彼此分离,亦可能多个候选回转区域R有部分重叠的现象。举例来说,图4绘示为本发明一实施例的多个候选回转区域的示意图。请见图4,由于被标记为1的连续的多个区段S的数量远大于阈值(阈值例如为5,本实施例中连续10个区段S被标示为”1”),运算装置可判断这一块区域可以列出7个候选回转区域R1~R7,并且相邻的两个候选回转区域可部分地重叠。
在另一实施例中,载具AMV可以装设有用以检测距离的至少一个检测装置(图未示)。检测装置可以装在车头侧或货叉侧,或是两处皆装设有检测装置。检测装置可以检测载具AMV在行进方向上是否有动态的障碍物(不会出现在障碍物图档中,例如其他载具或正在走动的人),以使载具AMV可以即时进行避障动作。
图5绘示为本发明一实施例的载具的避障操作的示意图。请见图5,H表示动态障碍物,S表示已记录在地图资讯中的静态障碍物。由图5可看出,第一路径P1会绕过静态障碍物S。然而载具AMV沿第一路径P1移动的过程中,在检测到动态障碍物H的情况下,运算装置可以依据载具AMV与动态障碍物H的距离以将动态障碍物H的位置标示在地图资讯中。运算装置可以整合载具AMV当前位置资讯、动态障碍物H的位置资讯以及地图资讯,来产生整合后地图资讯,以使载具AMV进行避障动作。运算装置并可依据整合后地图资讯重新规划路径以产生避障路径P1’,并依据避障路径P1’使载具进行避障动作,随后使得载具AMV在完成避障动作后可回到第一路径P1的路径上。具体来说,在完成避障动作后,运算装置取得载具AMV的当前位置的资讯与第一路径P1的偏差资讯,并依据偏差资讯使载具向第一路径P1移动,例如运算装置以每隔一间隔时间就计算一次载具AMV当前位置相对于第一路径P1的最短距离的方式,来重新回到第一路径P1。运算装置可同时检测载具AMV当前位置是否已接近回转开始点,若是则开始进行回转动作。在结束回转动作后,运算装置控制载具AMV回到第一路径P1上以到达目标位置,但本发明不限于此。在其他实施例中,载具AMV移动的过程中,在检测到动态障碍物H的情况下,运算装置可以依据载具AMV与动态障碍物H的距离以将动态障碍物H的位置新增标示在地图资讯中,并且重新规划路径以产生避障路径P1’以取代第一路径P1,而使载具AMV到达目标位置。此外,当载具AMV检测到预定回转区域RR内有动态障碍物H时,运算装置控制载具AMV在原地等待,并在检测到动态障碍物H消除后再进行回转动作。
总结以上,运算装置的操作流程可以如图6所示。图6绘示为本发明一实施例的路径规划方法的步骤流程图。请见图2及图6,步骤610为依据起始位置x3的资讯、目标位置x4的资讯以及地图资讯来产生第一路径P1。步骤S620为从目标位置x4往起始位置x3搜寻第一路径P1上的候选回转区域R。步骤S630为判断是否存在至少一个候选回转区域R。若判断结果为否,则回报路径错误的相关信息(步骤S640)。若判断结果为是,则前进到步骤S650。在步骤S650中,判断该至少一个候选回转区域R的数量是否为1。若判断结果为否(步骤S660,表示候选回转区域R有多个),则在多个候选回转区域R当中选择一个作为预定回转区域RR。若判断结果为是(步骤S670,表示候选回转区域R只有一个),则将该个候选回转区域R作为预定回转区域RR。在步骤S680中,判断预定回转区域RR的中间点与目标位置x4的距离是否等于载具AMV的回转半径r的两倍。若判断结果为否(步骤690),则依据预定回转区域RR来定义两个移动任务(一个移动任务为起始位置x3移动至预定回转区域RR;另一移动任务为预定回转区域RR移动至目标位置x4)。若判断结果为是(步骤700),则仅定义一个移动任务。特别说明的是,前述的移动任务是指载具AMV沿第一路径P1移动的任务,并不包含回转动作。
综上所述,本发明可以预先设定最佳的回转位置以及确保载具有足够的回转空间。由于无人载具在到达回转开始点之前皆不需要调整头向,因此并不会有多余的横向移动发生,故载具的实际行走路径会与预期的第一路线一致。进一步地,运算装置可以经由定时性地确认载具当前位置与第一路径的差异值,来控制载具维持在第一路径上,或是在结束避障动作后回到第一路径上。因此,本发明也可以确保载具不会有预期之外的行走路径。
以上所述,仅为本发明的优选实施例而已,不能以此限定本发明实施的范围,即凡是依照本发明权利要求书及说明书内容所作的简单的等效变化与修饰,皆仍属本发明专利涵盖的范围内。另外本发明的任一实施例或权利要求不须达到本发明所公开的全部目的或优点或特点。此外,说明书摘要和发明名称仅是用来辅助专利文件检索,并非用来限制本发明的权利范围。此外,本说明书或权利要求书中提及的“第一”、“第二”等用语仅用以命名元件(element)的名称或区别不同实施例或范围,而并非用来限制元件数量上的上限或下限。
附图标记说明:
A:行进方向
A1:第一方向
A2:第二方向
A3:第三方向
AMV:载具
AMV1:第一端
C:中间点
D:深色区域
H:动态障碍物
L1:第一长度
P1:第一路径
P1’:避障路径
RR:预定回转区域
R、R1~R7:候选回转区域
r:回转半径
SD:静态障碍物
S、S1~S5:区段
S110~S140、S610~S690、S700:步骤
x1:回转开始点
x2:回转结束点
x3:起始位置
x4:目标位置
300:地图图档
310:回转空间图档
320:障碍物图档
330:图档。
- 路径规划装置、路径规划方法以及路径规划系统
- 路径规划模型训练方法、路径规划方法、设备和系统