一种汽车自适应动力智能驾驶系统及方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明属于汽车智能驾驶领域,具体涉及一种汽车自适应动力智能驾驶系统及方法。
背景技术
现有的公交车、客运大巴等往往都有固定的运营线路,在车辆的运行生命周期内这些线路甚至都不会改变,但驾驶员会经常更换,不同的驾驶员有不同的驾驶风格,乘客的乘坐体验、车辆的能耗等都直接与驾驶员的状态密切关联,在驾驶员适应新路线的时期,还会因为不熟悉路况而增加交通事故发生的几率。
现有成熟的自动驾驶技术普遍停留在L2级,即半智能自动驾驶,能够简单地对转向、加速、减速做出反应,但不能记录路线,仅能辅助车辆启动的时候,其余操作还需要由驾驶员完成。
发明内容
为了解决上述问题,本发明公开了一种汽车自适应动力智能驾驶系统及方法,能够让车辆而非驾驶员记住运营线路,熟悉线路中所有路段的地形特征、限速测速以及车流量等信息,然后根据这些信息进行辅助驾驶,将驾驶员解放出来,提升乘客的乘坐体验,同时还可以降低能耗,减少交通事故发生的几率。
为实现上述目的,本发明智能驾驶系统能够实时采集路面信息加上记录运营路线,构成一整个运营地图,并不间断的实时采集路面信息,当路线修改的时候,也可灵活对构成的运营路线地图进行变更。
所述智能驾驶系统包括:包括车身姿态传感器组、GPS导航定位传感器和后台数据采集模块;
所述车身姿态传感器组在车辆首次运行中,收集路面信息及运营路线,将其传输到后台数据采集模块;
所述车身姿态传感器组和GPS导航定位传感器实时获取运行路面及车辆信息,并根据GPS导航定位传感器实时监控车辆在构建路线图所在位置;
所述后台数据模块通过车身姿态传感器组和GPS导航定位传感器收集到的数据构建运营路线图,并在后续获取的实时数据基础上对路线图进行迭代更新。
本发明所述车身姿态传感器组包括车身陀螺仪、单目视觉传感器和毫米波雷达,采集车身四周距离、路面信息、车身姿态、交通标示符等信息。
本发明的有益效果:在公交运营状况下,首先由GPS导航定位传感器和车身姿态传感组构成一个运营路线图,以此运营路线图对车辆进行一个初步控制,当没有车距过近,路面障碍等意外状况,和驾驶员自行操作的情况下,可以通过智能驾驶系统控制车辆加速、减速、转向,并且当出现意外状况时,根据实时状况进行控制车辆加速、减速、转向。
本发明有效的改善了一般自适应动力智能驾驶系统中,只能对实时状况进行控制车辆加速、减速、转向,不能根据路线行驶的缺陷。
本发明建立了两套对车辆控制的模式,模式一:在没有意外状况下,可以根据构建的地图计划进行加速、减速、转向,完成公交运营车辆的路线运营。模式二:在出现车距过近,路面障碍等意外状况下,对车辆进行加速、减速、转向,并在规避意外状况后,再次进入模式一。
附图说明
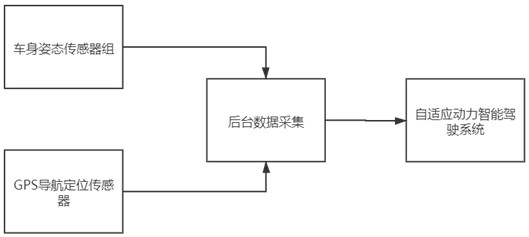
如图1为本发明智能驾驶系统的原理图。
如图2为本发明智能驾驶系统的流程示意图。
如图3为本发明智能驾驶系统的动力分配示意图。
具体实施方式
以下结合附图对本发明作进一步说明。
如图1所示,本发明一种汽车自适应动力智能驾驶系统,包括车身姿态传感器组、GPS导航定位传感器和后台数据采集模块,所述车身姿态传感器组、GPS导航定位传感器分别连接后台数据采集模块。
所述车身姿态传感器组包括车身陀螺仪、单目视觉传感器和毫米波雷达,采集车身四周距离、路面信息、车身姿态、交通标示符等信息。
其中车身陀螺仪采集车辆的重心和车辆颠簸信息;单目视觉传感器负责记录图像并通过芯片转化成点云信息;毫米波雷达采集车距信息和车辆之间的相对速度信息。
所述GPS导航定位传感器能精准地确定车辆所在位置,实时更新路线位置信息,并传递到后台数据模块。
所述后台数据模块记录运营路线信息,收集车身姿态传感器和GPS导航定位传感器采集的数据,形成对车辆包括但不限于启动、上下坡、转向和停止的动力分配,完成一整套自适应动力智能驾驶系统的工作流程,并在此自适应动力智能驾驶系统中完成对公交运营车辆的正常运营。
采用GPS定位,通过收集GPS定位信息,构建一个二维的平面图,再采用车身陀螺仪收集对于车身平衡信息,根据反馈的信息,对于不同路面下的信息,采取加速或则减速策略:平坦路面高速高档、坑洼路面低速低档;上下坡路面拆分为6阶段:
1)上坡前:高档加速行驶,利用车辆惯性提高爬坡能力;
2)上坡中:适当降档,增强爬坡力;
3)近坡顶:低速低档;
4)坡顶:切换空挡,低速滑行;
5)下坡中:切换高档,保持发动机制动以控制车速;
6)坡底:高速高档,准备切换到下一路况状态。
如图2所示,本发明提供了一种汽车自适应动力智能驾驶系统。
本发明采用GPS导航定位传感器进行精准定位,和实时更新路线位置信息。采用车身姿态传感组包括:车身陀螺仪、单目视觉传感器、毫米波雷达,获得车身姿态、车身四周图像、车身四周物体距离,并将数据传递到后台信息采集模块,来确定车身周围及车身实时状态,以便后续动力分配。当GPS导航定位传感器发现车辆出现偏离路线行驶情况,则退出自适应动力智能驾驶系统,提示驾驶员接手。后台信息采集模块收集车身姿态传感器组的信息,将其转化成可以实时分析的数据;并将数据进行对比并根据数据进行决策。将收集到的路线和根据路线行驶中的车身信息记录备份;在车辆偏离备份数据的时候,进行偏航信息记录,并与首次的备份做比对,确认偏航后提示驾驶员,并对偏航后的车身信息和导航信息进行第二次备份;当第三次后台信息采集模块收集数据时,与首次备份和第二次备份的数据进行对比,当数据与第二次备份数据一致时,则删除首次备份数据,并将第二次备份作为主要数据,并以此作为汽车自适应动力智能驾驶系统的数据基础;如果与首次备份一致时,则不改变。在确认车身姿态传感器组传来的路线和路线行驶中的车身信息无误后,根据此数据进行加减档操作。
如图3所示,本发明提供了一种汽车自适应动力智能驾驶系统的动力分配方法。
本发明采用车身姿态传感器组和GPS导航定位传感器进行数据采集,获得精准的车辆运营路线,实时车辆四周的物体图像,实时车辆距离物体四周的距离,和实时路面平整情况。完成获取对前方2公里范围内的路况信息,并根据路况信息实时分配动力。车辆一开始由驾驶员驾驶,自适应动力智能驾驶系统开始收集路面及路线信息,根据收集的路面及路线信息,构成一张运营路线地图。当地图构建完成后,后续数据只需要对路面信息实时判断。车辆将不断获得的路面信息实时调入计算,并根据相关滤波算法和图像识别算法,其中滤波算法采用IIR 数字滤波器例如:Y(n) = a1*Y(n-1) + a2*Y(n-2) + ... + ak*Y(n-k)+ b0*X(n) + b1*X(n-1) + b2*X(n-2) + ... + bk*X(n-k);图像识别算法采用灰度图像处理、高斯模糊、Canny边缘检测、掩盖非车道边缘图像、霍普线,y=mx+b,其中m和b分别表示线的斜率和y截距,以此对路面信息实时分析,使得动力分配更加合理。
基于上述自适应动力智能驾驶系统,提出一种智能驾驶方法,包括如下步骤:
(1)首先,车辆根据车身姿态传感器组在首次运行中,收集路面信息及运营路线,并在后续完善运营路线图的构建。将路线图作为自适应动力智能驾驶系统基础。
该地图根据车身姿态传感器组和GPS导航定位传感器传输的信息构成,其中采用GPS导航定位传感器在行驶一段路线后,对行驶路线图进行记录,采用车身姿态传感器组中的单目视觉传感器、车身陀螺仪对交通限速标识符、红绿灯、上下坡等记录。由此构成运营路线地图,车辆可以初步根据此路线地图,进行车辆的加速、减速、转向,保证车辆在符合交通规则下运营。
(2)采用Linux系统的软件,采用多任务系统处理。可以同时实时收集车身姿态传感器组的信息,并同时通过GPS导航定位传感器定位车辆,并通过构建的地图对车辆控制。
车身姿态传感器组由毫米波雷达、单目视觉传感器、车身陀螺仪组成,对车身四周距离、路面信息、车身姿态、交通标示符进行判断。根据实时获得信息,对车辆进行加减速控制。并根据GPS导航定位传感器实时监控车辆在构建路线图所在位置,根据路线地图,在没有车距过近,路面障碍等意外状况下,对车辆进行地图路线所获取的信息进行加速、减速、转向控制。
(3)实时收集车身姿态传感器组和GPS导航定位传感器的信息,根据对路面信息、车身姿态、交通标示符、车辆位置等状况,在每次车辆运营时对路线图进行迭代。
车辆在每次根据地图完成一次路线运营时,会将记录的路面信息、车身姿态、交通标示符、车辆位置等状况通过更新方式,将地图迭代,从而完成对车辆更好的控制,
采用车身姿态传感器组的信息,构成点云图,通过提前录入3D模型进行比对,对于匹配的点云,生成对应的3D模型,从而达到实时构建地图模型。通过车身姿态传感组的信息,对于每天车辆运营路线进行信息收集,在不同工作时段,对每次运营一次的总时间进行记录,对于不同交通时间段,分配合理的动力响应,从而减少能量消耗;在不同时间段,例如早晚高峰,车距安全的情况下,采用缓慢启动动力的策略,以减少交通堵塞带来的车辆顿挫和能量消耗。
- 一种汽车自适应动力智能驾驶系统及方法
- 一种自适应巡航驾驶系统、方法及汽车