用于求取车辆的起始位姿的方法
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及一种用于求取车辆的起始位姿的方法。此外,本发明涉及一种控制器、计算机程序以及一种机器可读的存储介质。
背景技术
对高精度数字地图的使用对于实现自动化的驾驶功能是必要的。这样的地图能够完成可自动化运行的车辆的基于传感器的环境感知。已知各种各样的、例如包含地理道路走向和交通参与者的典型轨迹的数字地图。典型轨迹在此可以从大量车辆的所谓的蜂群轨迹中被提取。
为了利用数字地图,车辆必须能够精确地确定其自身的位姿,该位姿由该车辆的位置和取向组成。例如车辆的位姿可以通过分析处理来自相应卫星的GNSS信号来求取。然而,基于GNSS的定位具有不充分的可用性和精度。
通常将迭代的定位方法用于确定位姿,该定位方法需要精确的初始位置或者说起始位置。为求取起始位置或者说起始位姿,可以近似地定位车辆并随后通过基于特征的定位、例如通过车轮测量数据来精细化该位姿。在基于特征的定位中,从雷达测量数据中提取静态特征并将这些静态特征与保存在特征地图中的特征进行比较。为此例如使用多维爬山算法以便获得这些特征的最佳取向。然而,这种多个维度上的特征的取向要求高计算能力。
发明内容
本发明所基于的任务可以视为,提出一种用于求取车辆的起始位姿的方法,该方法具有减少的对计算能力的要求。
该任务借助独立权利要求的各个主题来解决。本发明的有利构型是各个从属权利要求的主题。
根据本发明的一个方面,提供一种用于通过控制器求取车辆的初始位姿或者说起始位姿的方法。
该方法特别是能够通过控制器的初始化模块以硬件和/或软件的形式实施。
在一个步骤中,接收由GNSS传感器系统和/或测程传感器系统所求取到的测量数据,并分析处理所述测量数据用于求取该车辆的具有不确定性范围的近似位姿。
针对所求取到的不确定性范围从轨迹地图中提取交通参与者的至少一个轨迹。至少一个所提取出的轨迹例如表示交通参与者的来自历史数据的通常轨迹。
在进一步的步骤中,沿着所提取出的轨迹布置检验点,并对沿着这些轨迹的每个检验点实施优化算法。通过实施优化算法能够执行基于特征的定位或者说对近似位姿的精细化。为此可以考虑使用雷达传感器系统、激光雷达传感器系统和/或摄像机传感器系统的测量数据,并将这些测量数据与数字特征地图的数据进行比较。在此,优化算法可以从每个检验点出发连续沿着轨迹执行,或者可以离散地对每个规定的检验点实施。
接下来,通过该优化算法来求取具有对应的成本函数的位姿。这些位姿例如由此能够表示成本函数的局部最大。
在进一步的步骤中,从通过该优化算法所求取到的位姿中求取具有最大成本函数的位姿作为该车辆的起始位姿。
通过该方法能够降低用于求取起始位姿所要求的计算能力,因为优化算法能够以较少数量的必要函数调用来优化成本函数。特别是,基于来自轨迹地图的信息,二维优化问题被简化为沿着轨迹地图的典型的被提取出的轨迹的一维优化问题。
优化算法特别是用于比较从环境传感器系统的测量数据中所提取出的静态特征与来自特征地图的特征,并由此确定车辆的精确的起始位姿。为此可以提前接收并分析处理环境传感器系统——例如雷达传感器系统、激光雷达传感器系统和/或摄像机传感器系统——的测量数据,以便从车辆环境中提取静态特征。基于在近似地求取到的位姿的不确定性范围内所接收到的来自轨迹地图中的轨迹的区段,能够线性地或一维地沿着轨迹比较这些静态特征与保存在特征地图中的特征。通过该措施能够更快地并且以低计算能力需求来求取起始位姿。
根据本发明的另一方面提供一种控制器,其中,该控制器设置为用于实施该方法。该控制器例如可以是车辆侧的控制器、车辆外部的控制器或车辆外部的服务器单元,例如云系统。
将优化问题局限在预限定的轨迹上在此并不限于对起始位姿的求取。而是该原则还可以被应用于其他方法、例如车道保持辅助。
特别是,控制器可以具有定位模块和/或初始化模块。控制器由此能够实施用于求取车辆的起始位姿的方法和/或用于执行定位的方法。
此外,根据本发明的一个方面提供一种计算机程序,该计算机程序包括指令,所述指令在通过计算机或控制器执行该计算机程序时促使所述计算机或控制器执行根据本发明的方法。根据本发明的另一方面,提供一种机器可读的存储介质,在该存储介质上存储有根据本发明的计算机程序。
车辆可以根据BASt(Bundesanstalt für Straβenwese,德国联邦交通研究所)标准受辅助地、部分自动化地、高度自动化地和/或完全自动化地或者说无驾驶员地运行。
该车辆例如可以构型为乘用车、载重车、机器人出租车等。该车辆不限于在道路上的运行。而是该车辆还可以构型为水路交通运输工具、空中交通运输工具——例如运输无人机等。
在一种实施方式中,由所求取到的车辆的大致位姿确定车辆的取向,并将该取向与所提取出的轨迹的行驶方向进行比较,其中,执行用于仅仅考虑具有行驶方向的轨迹的滤波函数,其中,考虑与该车辆的取向一致的轨迹。
通过该措施能够去除在不确定性范围内的轨迹的所有与该车辆的行驶方向不一致的区段。由此能够附加地加速优化算法,因为例如避免了与沿着反向交通的轨迹的特征的比较。
根据另一实施方式,实施爬山算法作为优化算法。由此能够在技术上特别简单和快速地实现从环境传感器系统的测量数据中所提取出的静态特征与来自特征地图的特征的比较。成本函数优选可以在静态特征与来自特征地图的特征最大程度一致的情况下是最大的,由此,优化算法的可能目标是找到成本函数的至少一个最大值。
根据另一实施方式,在所求取到的不确定性范围内沿着至少一个所提取出的轨迹实施优化算法。通过将轨迹限制在所求取到的位姿的不确定性范围上,能够进一步减少轨迹区段的长度。
通过限制轨迹区段的长度,能够进一步减少优化算法的搜索范围或者说取向范围,并将该方法加速。
根据另一实施方式,以限定的时间间隔重复执行用于求取车辆的起始位姿的方法。通过该措施能够以规律的时间间隔求取起始位姿,并例如将该起始位姿考虑用于一致性检验或验证平行的定位功能。
根据另一实施方式,在不同的时间点求取车辆的多个起始位姿,其中,通过探测所求取到的起始位姿之间的不一致性来判定车辆与车道偏离或变换车道。若例如多个求取到的位姿中的一个位姿偏离轨迹和/或偏离以前的位姿,则可以求取到差异或者说不一致性。
在判定了不一致性的情况下,可以考虑将车辆的变换车道作为该不一致性的触发因素。通过该措施能够探测变换车道或非有意与车道偏离。
替代或附加地,不一致性可以通过所求取到的位姿与所提取出的轨迹的偏差来判定。在此可以设置容许偏差,必须超过该容许偏差,以判定不一致性。
根据另一实施方式,接收并分析处理由至少一个激光雷达传感器和/或雷达传感器所求取到的测量数据。接下来,根据这些测量数据求取特征并将这些特征与特征地图的数据进行比较,以便确定该车辆在该特征地图中沿着所提取出的轨迹的位姿。
基于所求取到的特征与保存在该特征地图中的特征的最小偏差通过优化算法来计算该车辆的位姿的最大成本函数。特别是可以从多个潜在的位姿中选择一个具有最高的或者说最佳的成本函数并因此具有最佳的特征一致性的位姿。
通过该措施能够确定近似的或者说粗略的范围,该范围通过基于特征的定位被进一步精细化。由此能够更快地且以更少的计算操作来实施起始位姿,因为被考虑用于基于特征的定位的范围受车辆的近似地求取到的位姿的不确定性范围的限制。
附图说明
以下根据经高度简化的示意图更详细地阐述本发明的优选实施。在此示出:
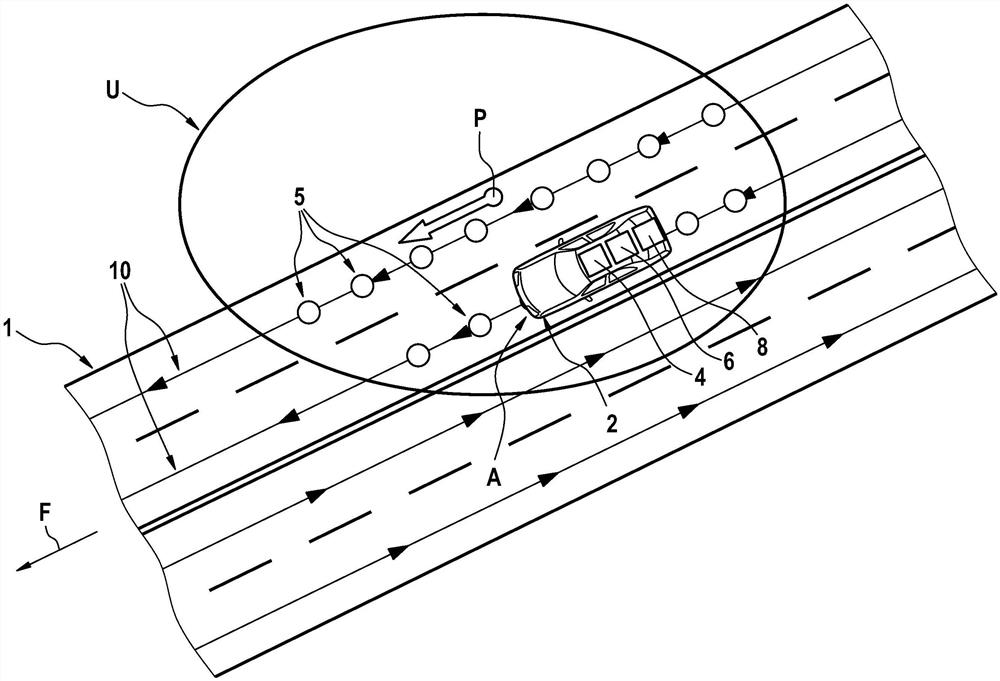
图1:具有近似位姿的不确定性范围和用于实施优化算法的多个点的对行驶道路的示意图;和
图2:具有位姿的不确定性范围和多个用于沿着轨迹运行优化算法的点的对行驶道路的示意图。
具体实施方式
图1和图2示出用于阐明一种用于求取车辆2的起始位姿A的方法的示意图,该起始位姿能够用于未进一步说明的对车辆2的定位。起始位姿A例如可以通过实施该方法的车辆侧控制器4来求取。
图1示出行驶道路1的示意图,具有近似位姿P的不确定性范围U和用于实施优化算法的多个检验点5。行驶道路1在行驶方向F上被车辆2驶过。
车辆2具有测程传感器系统和/或GNSS传感器系统6以及附加的用于基于特征地定位的传感器系统8。附加的传感器系统8例如可以是激光雷达传感器系统、雷达传感器系统和/或摄像机传感器系统。
在所示出实施例中,通过测程传感器系统和GNSS传感器系统6在行驶中收集测量数据。由测程传感器系统和GNSS传感器系统6的测量数据确定近似位姿P。因为该近似位姿P是有误差的,所以示意性地示出近似位姿P的不确定性范围U。
在此,检验点5可以在整个不确定性范围U上分布。从检验点5的位置出发能够实施优化算法。然而为了加速优化算法,从轨迹地图中提取轨迹10,这些轨迹延伸通过不确定性范围U。
接下来,沿着所提取出的轨迹10布置检验点5,从而对每个检验点5并且沿着轨迹10实施优化算法。由此能够将优化算法的计算开销从二维问题降至一维问题。该步骤在图2中示出。
图2示出行驶道路1的示意图,具有位姿的不确定性范围U和用于沿着轨迹10实施优化算法的多个检验点5。
基于轨迹地图的历史数据,车辆2沿着所提取出的轨迹10中的一个轨迹的概率是最大概率。因此沿着所提取出的轨迹10实施优化算法。
在实施优化算法时,优选接收并分析处理由环境传感器系统8所求取到的测量数据。
根据测量数据来求取静态特征,并将这些静态特征与特征地图的数据进行比较。优化算法特别是用于将静态特征与特征地图的特征进行比较并使成本函数最大化。
当所提取出的静态特征最佳地与特征地图一致时,成本函数变得最大。
求取车辆2的多个可能位姿中的一个具有最大成本函数的位姿作为起始位姿A并用于对车辆2的进一步定位。