一种基于双绞线驱动的螺旋式柔性单孔手术机器人结构
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及单孔手术机器人领域,具体是指一种基于双绞线驱动的螺旋式柔性单孔手术机器人结构。
背景技术
单孔手术相较于传统的开口手术具有创口小、患者恢复周期更短、感染风险更低等优点,但由于手术视野小、直杆手术工具操作易受杠杆效应影响、多工具难集成等原因单孔手术普及度不够,因此对于单孔手术机器人的研究一直是热点。市场上现有的手术机器人多为主从式手术机器人,从端依靠体积庞大的多个机械臂操纵内窥镜与直杆式手术工具,医生操作主控制台完成手术,然而无法观察和触及到许多狭窄病灶区。能够解决手术机器人从端僵直问题的连续体机器人被提出后,手术机器人技术逐渐进步。
现有的单孔手术机器人结构上分为单骨架和多骨架机器人,两者的中心骨架常由NiTi合金丝、用刚性圆柱外壳固定的弹簧或是刚柔耦合物如硅胶等软物质外部包围金属编织物组成,这使得单孔手术机器人在具有足够刚度的情况下总是缺少必要的柔顺性,因此无法适应在人体内等非结构化环境中的运动,然而大刚度也更容易对人体造成伤害,且这些结构本身要经过对原材料的二次加工与组装才能作为中心骨架。单孔手术机器人的驱动端常由电机带动丝杠螺母、滚轮等传动机构运动,这使得驱动端结构庞大、手术机器人使用不便捷,此外在手术机器人的末端集成手术工具的工作也正在执行中。
因此结构简单、兼顾刚度与柔顺性、能发生大变形、易集成工具的这类手术机器人更加适合单孔手术。
发明内容
本发明提供一种基于双绞线驱动的螺旋式柔性单孔手术机器人结构,该手术机器人结构采用金属螺旋缠绕软管作为柔性骨架,以其良好的弹性和变形特性为手术机器人提供足够的灵活度,其内部互锁的截面结构同时满足了手术机器人的刚度需求,另外,该手术机器人机构应用双绞线搭配电机作为驱动,实现了手术机器人驱动部分的轻量化、集成化,使得手术机器人更加适应实际应用。
一种基于双绞线驱动的螺旋式柔性单孔手术机器人结构,包括手术钳组件、金属螺旋缠绕软管、螺旋连接板、双绞线驱动组件,其特征在于:所述金属螺旋缠绕软管上端与手术钳组件焊接相连,所述金属螺旋缠绕软管下端与螺旋连接板通过螺旋配合相连,所述螺旋连接板与双绞线驱动组件相连。
进一步地,所述手术钳组件包括:基座,所述基座上平面的中心固连的圆柱滑道,所述基座上平面有相对圆柱滑道对称固连的两挡板,所述基座上平面有沿圆柱滑道圆周间隔135°分布的两个弹簧卡槽,所述弹簧卡槽轴向固定弹簧的底部,所述基座上有沿周向分布的通孔对Ⅳ、通孔对Ⅶ、通孔对Ⅸ、通孔对Ⅹ及与推动块上的中央通孔对Ⅺ相对应的中央通孔对Ⅷ。所述圆柱滑道外部套有弹簧,所述圆柱滑道伸入推动块的孔Ⅻ中,所述推动块与中间连杆一端铰接,所述中间连杆另一端与钳子通过孔Ⅱ铰接,所述钳子与基座上固连的挡板通过孔Ⅰ铰接。所述推动块在平行细线Ⅲ扭转收缩的过程中向下移动,推动钳子绕孔Ⅰ向中间闭合,平行细线Ⅲ解扭转时,所述推动块在下方弹簧的弹力作用下向上移动,钳子绕孔Ⅰ向外侧张开。
进一步地,所述金属螺旋缠绕软管由于其层层螺旋缠绕的互锁结构具有一定的轴向刚度,同时由于截面的特殊形状设计,所述金属螺旋缠绕软管在轴向上能够发生较大伸缩变形,通过平行细线Ⅰ与平行细线Ⅴ的扭转收缩的长度差实现所述金属螺旋缠绕软管的俯仰运动,通过平行细线Ⅱ与平行细线Ⅳ的扭转收缩的长度差实现所述金属螺旋缠绕软管的偏航运动,通过平行细线Ⅰ、平行细线Ⅱ、平行细线Ⅳ、平行细线Ⅴ相等的收缩长度实现所述金属螺旋缠绕软管的回缩运动。
进一步地,所述螺旋连接板上部通过螺旋凸起与金属螺旋缠绕软管配合相连,所述螺旋连接板下端通过周向分布的螺钉与电机支撑架相连,所述螺旋连接板上有周向分布的通孔对Ⅰ、通孔对Ⅱ、通孔对Ⅳ、通孔对Ⅴ及中央通孔对Ⅲ。
进一步地,所述双绞线驱动组件包括电机支撑架,所述电机支撑架内部周向固定电机Ⅰ、电机Ⅱ、电机Ⅳ、电机Ⅴ,所述电机支撑架下部中央装有电机Ⅲ,所述电机Ⅲ外壳的上端平面与电机Ⅰ、电机Ⅱ、电机Ⅳ、电机Ⅴ外壳的下端面贴合,所述电机Ⅲ外壳嵌入电机固定板的孔中,所述电机固定板的下端与电机支撑架下端固定连接,所述电机固定板的上端面与电机Ⅰ、电机Ⅱ、电机Ⅳ、电机Ⅴ外壳的下端面贴合起固定作用,所述电机Ⅲ输出轴轴孔固定对折的平行细线Ⅲ的一端,所述平行细线Ⅲ的另一端由线夹Ⅲ固结,所述电机Ⅰ、电机Ⅱ、电机Ⅳ、电机Ⅴ输出轴轴孔分别固定对折的平行细线Ⅰ、平行细线Ⅱ、平行细线Ⅳ、平行细线Ⅴ的一端,所述平行细线Ⅰ、平行细线Ⅱ、平行细线Ⅳ、平行细线Ⅴ的另一端分别由线夹Ⅰ、线夹Ⅱ、线夹Ⅳ、线夹Ⅴ固结,所述线夹Ⅰ、线夹Ⅱ、线夹Ⅳ、线夹Ⅴ的下平面与基座上平面重合,所述线夹Ⅲ的下平面与推动块上平面重合。
进一步地,所述平行细线Ⅰ、平行细线Ⅱ、平行细线Ⅲ、平行细线Ⅳ、平行细线Ⅴ的一端分别穿过电机Ⅰ、电机Ⅱ、电机Ⅲ、电机Ⅳ、电机Ⅴ输出轴轴孔来固定,所述平行细线Ⅰ、平行细线Ⅱ、平行细线Ⅳ、平行细线Ⅴ另一端分别穿过螺旋连接板上的通孔对Ⅰ、通孔对Ⅱ、通孔对Ⅳ、通孔对Ⅴ进入金属螺旋缠绕软管中,所述平行细线Ⅰ、平行细线Ⅱ平行细线Ⅳ、平行细线Ⅴ另一端再分别经过基座上的通孔对Ⅵ、通孔对Ⅶ、通孔对Ⅸ、通孔对Ⅹ到达基座上平面,并分别用线夹Ⅰ、线夹Ⅱ、线夹Ⅳ、线夹Ⅴ固结,所述平行细线Ⅲ另一端穿过螺旋连接板上的中央通孔对Ⅲ进入金属螺旋缠绕软管中,所述平行细线Ⅲ另一端再依次经过基座上的中央通孔对Ⅷ与推动块上的中央通孔对Ⅺ并用线夹Ⅲ固结。
双绞线传动部分采用相对于电机轴孔对折成两相等长度段的平行细线,通过电机轴的旋转带动平行细线相互扭转成螺旋状,细线扭转后其长度在轴线方向上缩短,同时电机的旋转角度与细线的收缩长度间有较大的传动比,当电机反向旋转时,细线的扭转逐渐解除,其轴线方向长度伸长。
本发明的有益效果是:
1、本发明中,采用了新型的柔性单孔手术机器人骨架,既具有柔顺性又有一定的刚度,同时该骨架具有两个弯曲自由度和一个轴向回缩自由度。
2、本发明中,采用了新型的双绞线驱动方式,利用该驱动方式的大传动比特性,将手术机器人驱动端结构小型化、紧凑化。
3、本发明中,手术机器人末端集成了手术钳,手术钳能够自由控制开合。
附图说明
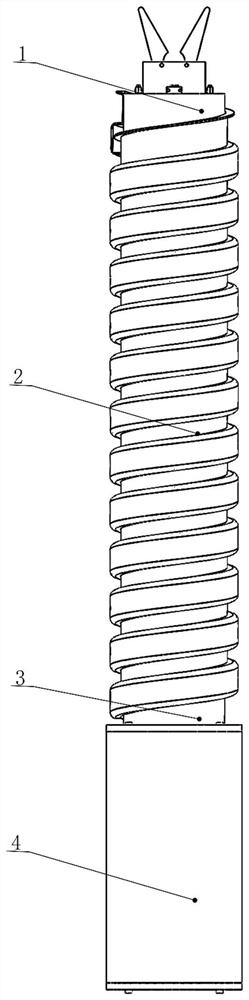
图1为本发明整体结构示意图;
图2为本发明手术钳结构示意图;
图3-1、图3-2为本发明金属螺旋缠绕软管压缩、弯曲示意图;
图4为本发明螺旋连接板结构示意图;
图5-1、图5-2为本发明双绞线驱动组件结构示意图;
图6为本发明线夹结构示意图;
具体实施方式
如图1-图6所示,一种基于双绞线驱动的螺旋式柔性单孔手术机器人结构,包括手术钳组件1、金属螺旋缠绕软管2、螺旋连接板3、双绞线驱动组件4,其特征在于:所述金属螺旋缠绕软管2上端与手术钳组件1焊接相连,所述金属螺旋缠绕软管2下端与螺旋连接板3通过螺旋配合相连,所述螺旋连接板3与双绞线驱动组件4相连。
图2所述手术钳组件1包括:基座103,所述基座103上平面的中心固连有圆柱滑道103-7,所述基座103上平面有相对圆柱滑道103-7对称固连的两挡板103-8,所述基座103上平面有沿圆柱滑道103-7圆周间隔135°分布的两个弹簧卡槽103-6,所述弹簧卡槽103-6轴向固定弹簧104的底部,所述基座103上有沿周向分布的通孔对Ⅵ103-1、通孔对Ⅶ103-2、通孔对Ⅸ103-4、通孔对Ⅹ103-5及与推动块105上的中央通孔对Ⅺ105-1相对应的中央通孔对Ⅷ103-3的中央通孔对Ⅷ103-3,所述圆柱滑道103-7外部套有弹簧104,所述圆柱滑道103-7伸入推动块105的孔Ⅻ105-2中,所述推动块105与中间连杆102一端铰接,所述中间连杆102另一端与钳子101通过孔Ⅱ101-2铰接,所述钳子101与基座103上固连的挡板103-8通过孔Ⅰ101-1铰接,所述推动块105在平行细线Ⅲ403扭转收缩的过程中向下移动,推动钳子101绕孔Ⅰ101-1向中间闭合,平行细线Ⅲ403解扭转时,所述推动块105在下方弹簧104的弹力作用下向上移动,钳子101绕孔Ⅰ101-1向外侧张开。
图3所述所述金属螺旋缠绕软管2由于其圈圈螺旋缠绕的互锁结构具有一定的轴向刚度,同时由于截面的特殊形状设计,所述金属螺旋缠绕软管2在轴向上能够发生较大伸缩变形,通过平行细线Ⅰ401与平行细线Ⅴ405的扭转收缩的长度差实现所述金属螺旋缠绕软管2的俯仰运动,通过平行细线Ⅱ401与平行细线Ⅳ405的扭转收缩的长度差实现所述金属螺旋缠绕软管2的偏航运动,通过平行细线Ⅰ401、平行细线Ⅱ402、平行细线Ⅳ404、平行细线Ⅴ405相等的收缩长度实现所述金属螺旋缠绕软管2的回缩运动。
图4所述螺旋连接板3上部通过螺旋凸起与金属螺旋缠绕软管2配合相连,所述螺旋连接板3下端通过周向分布的螺钉与电机支撑架431相连,所述螺旋连接板3上有周向分布的通孔对Ⅰ301、通孔对Ⅱ302、通孔对Ⅳ304、通孔对Ⅴ305及中央通孔对Ⅲ303。
图5所述双绞线驱动组件4包括电机支撑架431,所述电机支撑架431内部周向固定电机Ⅰ411、电机Ⅱ412、电机Ⅳ414、电机Ⅴ415,所述电机支撑架431下部中央装有电机Ⅲ413,所述电机Ⅲ413外壳的上端平面与电机Ⅰ411、电机Ⅱ412、电机Ⅳ414、电机Ⅴ415外壳的下端面贴合,所述电机Ⅲ413外壳嵌入电机固定板421的孔中,所述电机固定板421的下端与电机支撑架431下端固定连接,所述电机固定板421的上端面与电机Ⅰ411、电机Ⅱ412、电机Ⅳ414、电机Ⅴ415外壳的下端面贴合起固定作用,所述电机Ⅲ413输出轴轴孔固定对折的平行细线Ⅲ403的一端,所述平行细线Ⅲ403的另一端由线夹Ⅲ443固结,图6所述线夹Ⅲ443的下平面与图2所述推动块105上平面重合,所述电机Ⅰ411、电机Ⅱ412、电机Ⅳ414、电机Ⅴ415输出轴轴孔分别固定对折的平行细线Ⅰ401、平行细线Ⅱ402、平行细线Ⅳ404、平行细线Ⅴ405的一端,所述平行细线Ⅰ401、平行细线Ⅱ402、平行细线Ⅳ404、平行细线Ⅴ405的另一端分别由线夹Ⅰ445、线夹Ⅱ444、线夹Ⅳ442、线夹Ⅴ441固结,图6所述线夹Ⅰ445、线夹Ⅱ444、线夹Ⅳ442、线夹Ⅴ441的下平面与图2基座103上平面重合。
图1-图5所述平行细线Ⅰ401、平行细线Ⅱ402、平行细线Ⅲ403、平行细线Ⅳ404、平行细线Ⅴ405的一端分别穿过电机Ⅰ411、电机Ⅱ412、电机Ⅲ413、电机Ⅳ414、电机Ⅴ415输出轴轴孔来固定,所述平行细线401、平行细线402、平行细线404、平行细线405另一端分别穿过螺旋连接板3上的通孔对Ⅰ301、通孔对Ⅱ302、通孔对Ⅳ304、通孔对Ⅴ305进入金属螺旋缠绕软管2中,所述平行细线Ⅰ401、平行细线Ⅱ402、平行细线Ⅳ404、平行细线Ⅴ405另一端再分别经过基座103上的通孔对Ⅵ103-1、通孔对Ⅶ103-2、通孔对Ⅸ103-4、通孔对Ⅹ103-5到达基座103上平面,并分别用线夹Ⅰ445、线夹Ⅱ444、线夹Ⅳ442、线夹Ⅴ441固结,所述平行细线Ⅲ403另一端穿过螺旋连接板3上的中央通孔对Ⅲ303进入金属螺旋缠绕软管2中,所述平行细线Ⅲ403另一端再依次经过基座103上的中央通孔对Ⅷ103-3与推动块105上的中央通孔对Ⅺ105-1,并用线夹Ⅲ443固结。
如图1-图6所示,实际工作过程中,当电机Ⅰ411和电机Ⅴ415顺时针(从输出端面看)旋转,平行细线Ⅰ401和平行细线Ⅴ405相互扭转,轴向长度逐渐缩短,控制电机Ⅰ411旋转角度大于电机Ⅴ415旋转角度,使得平行细线Ⅰ401收缩多于平行细线Ⅴ405,造成金属螺旋缠绕软管2在平行细线Ⅰ401方向上长度短于平行细线Ⅴ405方向上长度,由于金属螺旋缠绕软管2本身的弹性和连续性,金属螺旋缠绕软管2将会向平行细线Ⅰ401方向弯曲。
当金属螺旋缠绕软管2弯曲到目标角度时,电机Ⅰ411和电机Ⅴ415逆时针旋转,平行细线Ⅰ401和平行细线Ⅴ405解扭转,轴向长度逐渐伸长,金属螺旋缠绕软管2的变形逐渐恢复。
当电机Ⅱ412和电机Ⅳ414顺时针(从输出端面看)旋转,平行细线Ⅱ402和平行细线Ⅳ404相互扭转,轴向长度逐渐缩短,控制电机Ⅱ412旋转角度大于电机Ⅳ414旋转角度,使得平行细线Ⅱ402收缩多于平行细线Ⅳ404,由于平行细线Ⅱ与平行细线Ⅳ上端均固定,使得金属螺旋缠绕软管2在平行细线Ⅱ402方向上长度短于平行细线Ⅳ404方向上长度,金属螺旋缠绕软管2将会向平行细线Ⅱ402方向弯曲。
当金属螺旋缠绕软管2弯曲到目标角度时,电机Ⅱ412和电机Ⅳ414逆时针旋转,平行细线Ⅱ402和平行细线Ⅳ404解扭转,轴向长度逐渐伸长,金属螺旋缠绕软管2的变形逐渐恢复。
当电机Ⅰ411、电机Ⅴ415和电机Ⅱ412、电机Ⅳ414均顺时针旋转,电机Ⅰ411旋转角度大于电机Ⅴ415旋转角度且电机Ⅱ412旋转角度大于电机Ⅳ414旋转角度时,平行细线Ⅰ401收缩多于平行细线Ⅴ405、平行细线Ⅱ402收缩多于平行细线Ⅳ404,使得金属螺旋缠绕软管2在平行细线Ⅰ401方向上长度短于平行细线Ⅴ405方向上长度、平行细线Ⅱ402方向上长度短于平行细线Ⅳ404方向上长度,金属螺旋缠绕软管2将朝平行细线Ⅰ401和平行细线Ⅱ402中间方向弯曲。当电机Ⅰ411、电机Ⅴ415和电机Ⅱ412、电机Ⅳ414均逆时针旋转至初始角度,金属螺旋缠绕软管2的变形逐渐恢复。
当金属螺旋缠绕软管2弯曲到目标位置要执行手术钳闭合操作时,电机Ⅲ413顺时针旋转带动平行细线Ⅲ403扭转收缩,平行细线Ⅲ403拉动推动块105沿圆柱形滑道103-7向下移动,推动钳子101以孔Ⅰ101-1为中心逆时针向内侧旋转闭合。当金属螺旋缠绕软管2弯曲到目标位置要执行手术钳张开操作时,电机Ⅲ413逆时针旋转带动平行细线Ⅲ403解扭转并伸长,推动块105在正下方弹簧104的弹力作用下沿圆柱形滑道103-7向上移动,推动钳子101以孔Ⅰ101-1为中心顺时针向外侧旋转张开。
如上即为本发明的实施例,上述实施例以及实施例中的具体参数仅是为了清楚表述发明的验证过程,并非用以限制本发明的专利保护范围,本发明的专利保护范围仍然以其权利要求书为准,凡是运用本发明的说明书及附图内容所作的等同结构变化,同理均应包含在本发明的保护范围内。
- 一种可转动的柔性驱动光伏清洁机器人及控制方法
- 单孔腹腔微创手术的多自由度柔性机器人用驱动机构
- 单孔腹腔微创手术的多自由度柔性机器人用驱动机构