N量子位量子门的执行
文献发布时间:2023-06-19 18:27:32
背景技术
量子计算机是一种物理机器,被配置为执行基于或受量子力学现象影响的逻辑运算。传统的计算机存储器将数字数据保存在位的阵列中并执行逐位逻辑运算,而量子计算机将数据保存在量子位的阵列中,并对量子位进行量子机械操作,以实现所需的逻辑。因此,可以应用一个或多个量子逻辑门来操作一组量子位。
发明内容
本发明内容以简化的形式介绍了一些概念,这些概念将在下文的详细说明中进一步描述。本发明内容并非旨在确定所要求保护的标的物的关键特征或基本特征,也并非旨在限制所要求保护的标的物的范围。此外,所要求保护的主题不限于解决本公开任何部分中指出的任何或所有缺点的实现。
本发明的一个方面涉及一种用于操作量子计算设备的方法。量子计算设备接收在一组n目标量子位上执行第一n量子位门的请求。n量子位门包括对角门和由多量子位克利福德(Clifford)门共轭的对角门中的一个或两者。标识一组n接口量子位,在其上执行第一n量子位门。在每个目标量子位及其对应接口量子位上执行联合Z-Z测量。第一n量子位门在一组n接口量子位上被执行。在完成对一组n接口量子位上的第一n量子位门的执行之前,对n目标量子位中的一个或多个执行计算。
附图说明
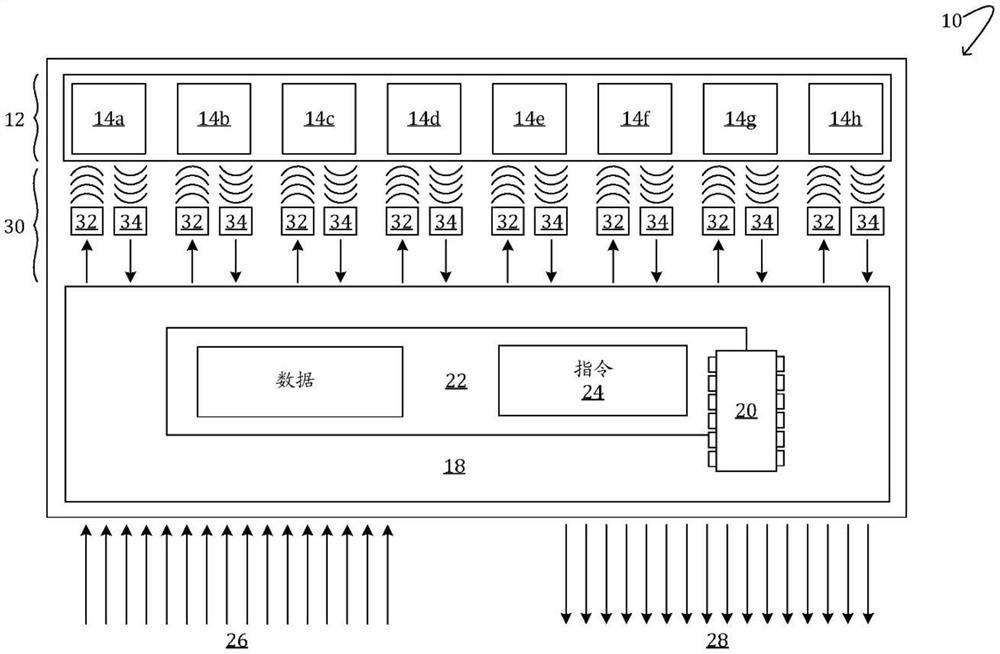
图1示出示例量子计算机的方面。
图2示出布洛赫球(Bloch sphere),其以图形方式表示量子计算机的一个量子位的量子态。
图3示出示例量子位平面。
图4是用于在量子计算设备上远程执行量子门的示例方法。
图5是用于在量子计算设备上延迟执行量子门的示例方法。
图6A示意性地示出用于延迟远程执行CCZ门的示例量子电路。
图6B示意性地示出了用于执行n量子位门的示例量子电路。
图7示意性地示出示例量子电路恒等式(identity)。
图8示意性地示出应用图7的恒等式电路后图6的示例量子电路。
图9示意性地示出在交换(commuting)断言门经过CCZ门之后图8的示例量子电路。
图10示意性地示出示例量子电路恒等式。
图11示意性地示出应用图10的恒等式电路后图9的示例量子电路。
图12示意性地示出了用于将CCZ门分解为泡利指数乘积的示例量子电路。
图13示意性地示出了图11的示例量子电路,其具有如图12所示的分解CCZ门。
图14示意性地示出了示例量子电路恒等式。
图15示意性地示出应用图14的恒等式电路后图13的示例量子电路。
图16示意性地示出了附加量子电路恒等式。
具体实施方式
量子计算使用量子力学特性来实现特定应用的计算,否则在常规(即非量子)最先进的计算机上无法在合理的时间内执行这些计算。示例应用包括质因数分解、数据库搜索以及物理和化学模拟。量子计算机的基本计算单位是量子位。量子门(quantum gate)或量子逻辑门(quantium logic gate)是一种被配置为对若干量子位进行操作的量子电路。量子门可以作为传统数字计算机中经典逻辑门的类似物。
直接执行特定量子门可能需要在量子计算设备上相邻位置放置一组量子位。此外,这些门的执行可能需要将特殊状态(如T状态)传递给所讨论的量子位并应用于该量子位。可能需要复杂的算法来解决将量子位传送到适当位置的几何问题。这使得此类门的执行既昂贵又依赖于位置。
此外,在一组量子位中的任何量子位上执行后续门可能会被延迟,直到成功应用前一个量子位。这种门的执行可能是一个相对漫长的过程,因此直接执行这种门可能会导致涉及这些量子位的后续门的执行延迟。直接执行这样的门在物理上是不可能的,在非相邻量子位上间接执行门可能会成倍地增加计算开销。
在此,提出了缓解物理相邻性和执行延迟问题的方法。n-量子位门的远程执行可以通过对具有预先建立的连通性的成对量子位执行局部(local)泡利门和局部联合泡利测量来完成。利用量子门的这种布局方法,可以延迟和/或远程执行任何对角n-量子位门的执行。这种方法进一步使交换对角门的执行流水线化,即使它们作用于相同的量子位,因为在完成纠错阶段之前,测量的卸载可能会释放目标量子位。
此外,这样的对角n量子位门的执行通常取决于特殊状态下的量子位供应。这些特殊的量子位态通常由位于静态位置的状态工厂产生。因此,可以在靠近此类工厂的一组量子位上执行此类门的远程执行,而不是在量子平面其他位置的一组上执行,从而提高操作速度,同时降低错误率。
对于上下文,将首先描述量子计算机体系结构的各个方面。现在转到附图,图1显示了配置为执行量子逻辑操作的示例量子计算机10的各个方面(参见下文)。传统的计算机存储器将数字数据保存在位的阵列中并执行逐位逻辑运算,而量子计算机将数据保存在量子位的阵列中,并对量子位进行量子机械操作,以实现所需的逻辑。因此,图1的量子计算机10包括至少一个量子位寄存器12,该量子位寄存器包括量子位14的阵列。所示的量子位寄存器长度为8个量子位;还设想了包含更长和更短量子位阵列的量子位寄存器,以及包含任意长度的两个或更多量子位寄存器的量子计算机。
根据量子计算机10所需的体系结构,量子位寄存器12的量子位14可以有多种形式。每个量子位可以包括:马约拉纳(Majorana)准粒子编码和/或其他拓扑保护量子系统、超导约瑟夫森结、俘获离子、耦合到高精细度腔的跳闸原子、限制在富勒烯内的原子或分子、限制在主体晶格内的离子或中性掺杂原子、显示离散空间或自旋电子状态的量子点、经由静电陷阱夹带的半导体结中的电子孔、耦合量子线对、可通过磁共振寻址的原子核、氦中的自由电子、分子磁体或类金属碳纳米球,作为非限制性示例。更一般地说,每个量子位14可以包含任何粒子或粒子系统,这些粒子或粒子系统可以存在于两个或多个可通过实验测量和操纵的离散量子态中。例如,量子位可以在对应于通过线性光学元件(例如,镜子、分束器和移相器)的不同光传播模式的多个处理状态下实现,也可以在玻色-爱因斯坦凝聚体中累积的状态下实现。
图2是布洛赫球16的图示,它提供了单个量子位14的一些量子力学方面的图形描述。在此描述中,布洛赫球的北极和南极分别对应于标准基矢量|0>和|1>,例如电子或其他费米子的上自旋态和下自旋态。布洛赫球上的点集包含量子位的所有可能的纯态|ψ>,而内部点对应于所有可能的混合态。给定量子位的混合态可能由退相干引起,退相干可能是由于与外部自由度的不必要耦合而发生的。
现在回到图1,量子计算机10包括控制器18。控制器可以包括至少一个处理器20和相关联的计算机存储器22。控制器18的处理器20可以操作地耦合到外围组件(诸如网络组件),以使量子计算机能够远程操作。控制器18的处理器20可以采取中央处理器(CPU)、图形处理单元(GPU)等的形式。因此,控制器可以包括经典电子元件。术语“经典”和“非量子”在此适用于可以精确建模为粒子系综的任何组件,而无需考虑任何单个粒子的量子态。例如,经典的电子元件包括集成的微光刻晶体管、电阻器和电容器。计算机存储器22可被配置为保存程序指令24,该程序指令可使处理器20执行控制器的任何功能或过程。在量子位寄存器12是低温或低温设备的示例中,控制器18可以包括在低温或低温下操作的控制组件,例如,在77K下操作的现场可编程门阵列(FPGA)。在此类示例中,低温控制组件可操作地耦合至在正常温度下可操作的接口组件。
量子计算机10的控制器18被配置为接收多个输入26并提供多个输出28。输入和输出可以分别包括数字和/或模拟线。至少一些输入和输出可以是数据线,通过数据线向量子计算机提供数据和/或从量子计算机提取数据。其他输入可以包括控制线,通过这些控制线可以调整或以其他方式控制量子计算机的操作。
控制器18经由量子接口30操作地耦合到量子位寄存器12。量子接口被配置为与控制器双向交换数据。量子接口还被配置为与量子位寄存器双向交换与数据对应的信号。根据量子计算机10的体系结构,此类信号可以包括电信号、磁信号和/或光信号。如量子位14阵列的集体量子态所定义,经由通过量子接口传输的信号,控制器可以询问并以其他方式影响量子位寄存器中保持的量子态。为此,量子接口包括至少一个调制器32和至少一个解调器34,每个调制器32与量子位寄存器的一个或多个量子位操作耦合。每个调制器被配置为基于从控制器接收到的调制数据向量子位寄存器输出信号。每个解调器被配置成感测来自量子位寄存器的信号,并基于该信号将数据输出到控制器。在一些示例中,从解调器接收的数据可能是量子位寄存器中保持的量子态测量的可观测估计值。控制器、调制器和解调器统称为“控制器系统”。
在一些示例中,来自调制器32的适当配置的信号可以与量子位寄存器12的一个或多个量子位14物理交互,以触发对一个或更多量子位中保持的量子态的测量。然后,解调器34可感测一个或多个量子位根据测量释放的结果信号,并可将与结果信号对应的数据提供给控制器18。换句话说,解调器可被配置为基于接收到的信号输出一个或多个可观测值的估计值,反映量子位寄存器中一个或更多量子位的量子态,并将该估计值提供给控制器。在一个非限制性示例中,调制器可基于来自控制器的数据,向一个或多个量子位的电极提供适当的电压脉冲或脉冲序列,以启动测量。在短时间内,解调器可感测来自一个或多个量子位的光子发射,并可在进入控制器的量子接口线上断言相应的数字电压电平。一般来说,量子力学状态的任何测量都是由对应于要测量的可观测值的算子O定义的;测量的结果R保证是O的允许本征值之一。在量子计算机10中,R在统计上与测量前的量子位寄存器状态有关,但不是由量子位注册状态唯一确定的。
根据来自控制器18的适当输入,量子接口30可被配置为实现一个或多个量子逻辑门,以操作量子位寄存器12中保持的量子态。鉴于经典计算机系统的每种类型的逻辑门的功能是根据对应的真值表描述的,每种量子门的功能都由对应的算子矩阵来描述。例如,n量子位门可以用2
例如,阿达玛(Hadamard)门H定义为:
H门作用于单个量子位;它将基态|0>映射为
相位门S定义为
S门保持基态|0>不变,但将|1>映射为e
一些量子门对两个或更多量子位进行操作。例如,SWAP门作用于两个不同的量子位并交换其值。该门的定义如下
上述量子门和相关算子矩阵的列表并非穷尽目的,而是为了便于说明而提供。其他量子门包括泡利-X、泡利-Y和泡利-Z门、
单量子位泡利矩阵包括以下4个矩阵:
而n量子位泡利矩阵是以下形式的矩阵:
N量子位泡利矩阵可以简称为泡利矩阵。注意泡利矩阵是厄米矩阵(自伴随)。换句话说,对于所有P,如果P是泡利矩阵,则
泡利单位是i
表1
例如,令P是来自
备选地,可以使用exp、sin和cos的幂级数展开式以及每个泡利算子的平方都是恒等式来表示相同的语句。
继续在图1中,来自量子接口30的调制器32的适当配置的信号可以与量子位寄存器12的一个或多个量子位14物理交互,以便断言任何所需的量子门操作。如上所述,所需的量子门操作具体定义为代表量子位寄存器状态的复矢量的旋转。为了实现所需的旋转O,量子接口30的一个或多个调制器可以在预定的持续时间T
本文使用术语“预言机(oracle)”和“量子程序”来描述基本量子门和/或量子计算机10可执行的测量操作的预定序列。例如,预言机可用于转换量子位寄存器12的量子态,以实现经典或非基本量子门操作或应用密度算子。在某些示例中,预言机可用于执行预定义的“黑匣子”运算f(x),该运算可合并到复杂的操作序列中。为了确保伴随运算,将n个输入量子位|x>映射到m个输出或ancilla量子位|y>=f(x)的预言机可以被定义为在n+m个量子位上操作的量子门
本文描述中隐含的是,可以经由量子接口30询问量子位寄存器12的每个量子位14,以便有把握地揭示表征该量子位的量子态的标准基向量|0>或|1>。然而,在一些实现中,物理量子位的量子态的测量可能会出错。因此,任何量子位14都可以实现为逻辑量子位,其中包括根据错误纠正预言机的测量的物理量子位分组,该预言机以置信度揭示了逻辑量子位的量子态。
图3显示了示例量子位平面300,其中多个量子位布置在网格中。在本示例中,当n=3时,请求一个对角n量子位门。一组3个量子位310a、310b和310c被标识为目标量子位,每个量子位在物理上与接口量子位(312a、312b和312c)相邻。对每对量子位(例如,用虚线连接的310a和312a)进行联合Z-Z测量。然后,可以基于Z-Z测量在接口量子位上执行门,然后执行泡利校正。
然而,即使量子位对在物理上不相邻,也可以在成对的目标/接口量子位上执行这种对角门。可以对位于量子位平面不同部分的量子位进行Z-Z测量,前提是它们具有某种程度的连通性。量子位平面350显示连接到接口量子位362a、362b和362c的示例目标量子位360a、360b和360c,用虚线连接在一起表示定义的连接路径。本文中,共享连接性但物理上彼此不相邻的量子位称为彼此“远程”定位。
通常,如果这些连接路径在对之间共享特殊状态,则可以提前准备好。在这个例子中,贝尔对(Bell pair)371a和371b、372a和372b以及373a和373b呈现在量子位平面350上,使得每对目标和接口量子位共享一个贝尔对。例如,目标量子位360a和接口量子位362a共享贝尔对371a和371b。
对于共享贝尔对的成对量子位,可以通过消耗贝尔对简单地执行联合Z-Z测量。这允许远程门执行类似于远程传送操作。对于附加测量,量子位可能以“预共享”状态开始,其中对于任何2个量子位,提前预共享一条链路,以便准备电路执行远程联合Z-Z测量。
应用Z门后,可以记录Z测量,并应用泡利校正。然而,对于某些操作,诸如交换门、对角门、克利福德门等,不需要立即执行这些校正。相反,校正可能会越过门。因此,可以启动门执行,但在释放目标量子位以供额外使用之前,不需要完成目标量子位校正。由于对角门需要额外的时间来执行,这通常会阻止所有涉及的量子位在门完成之前被重用。通过移动校正(例如延迟校正),目标量子位可以由新的门应用,而无需等待校正完成。这允许量子操作的流水线化。
图4是用于操作量子计算设备的示例方法400。可以制定方法400,以便能够在量子计算设备的量子平面内远程执行n量子位门。
在410处,方法400包括接收在一组n目标量子位上执行第一n量子位门的请求,n量子位门包括对角门和由多量子位克利福德门共轭的对角门中的一个或两者。该请求可以在量子计算设备的控制器处被接收,并且一组n目标量子位可以由该控制器定义。请求可以指定具有适当状态、属性、特征、相对位置等的特定量子位。控制器可以识别满足这些属性的一组n目标量子位,并用于满足请求。N可以是整数个量子位,使得n≥1。尽管主要针对多量子位门进行描述,但本文所述的系统和方法适用于单量子位门。
通常,如果门D是n量子位对角门,克利福德门C是m量子位门,其中m≥n量子位,则扩展方法也可以在I是(m-n)量子位恒等式门的情况下执行
其他常见的对角门包括但不限于,由对角矩阵
继续在420处,方法400包括标识一组n接口量子位,将要在该组n接口量子位上执行第一n量子位门,该组n接口量子位包括一个或多个远离该组n目标量子位的量子位。如关于图3所述,接口量子位中的一个或多个可能不位于目标量子位附近,并且可能固有地不具有与目标量子位的连接。相反,一个或多个接口量子位可能位于量子平面上的其他位置,在该位置可以方便地执行所请求的n量子位门,例如靠近魔法态(magic-state)的源,诸如T态。接口量子位可以包含一些、全部或等效属性,用于执行用于选择目标量子位的请求门。接口量子位可以优先分配成本高或完成时间短的门,而相对容易在局部执行的门可能无法远程执行,诸如H、S、X、Y和Z门。
在430处,方法400包括经由预建立的纠缠对每个目标量子位及其对应的接口量子位执行联合Z-Z测量。在一些例子中,除了联合Z-Z测量之外,还进行了多量子位泡利测量。这可以使该方法适用于更广泛的门类,并允许接口量子位的数目大于或等于目标量子位的数目。
例如,该方法可以包括建立一组n贝尔对,使得每个贝尔对的第一量子位就位于n目标量子位的第一量子位的局部,并且贝尔对中的第二量子位远程位于n接口量子位的第一量子位。这样,量子计算设备经由贝尔对有效地执行目标和接口量子位之间的联合Z-Z测量。
例如,每个贝尔对的第一量子位可以定位在目标量子位附近或与之相连,而贝尔对中的第二量子位可以定位在接口量子位旁边或与之连通,从而在目标量子位和对应的非相邻接口量子位之间建立连通性。贝尔对可以基于对门的输入、对基本量子位平面结构(量子位连接性)的描述以及所请求门的属性来建立。在一些示例中,标识目标量子位、标识接口量子位和建立贝尔对的动作可以以任何顺序、并行或彼此独立的方式执行。例如,贝尔对可以提前准备好,以便并行执行该方法。在440处,方法400包括在一组n接口量子位上执行第一n量子位门。
在450处,方法400包括至少对一组n目标量子位和一组n接口量子位执行经典跟踪和校正。例如,方法400可包括经由经典跟踪来标识指示Z校正的一组n目标量子位内的一个或多个量子位。为了在一组n接口量子位上完成第一n量子位门的执行,可以沿着一组n接口量子位上的X测量自旋。可以存储X的测量自旋值,然后可以标识指示Z校正的一组n接口量子位中的一个或多个量子位。然后,至少可以对标识的目标量子位和标识的接口量子位执行Z校正。在一些示例中,除了Z校正之外或作为Z校正的替代,还可以执行多量子位泡利校正。在一些示例中,还可以基于先前获得的经典结果和/或收集的跟踪数据对任何相关量子位执行Z校正。例如,当第一n量子位门正在执行时,如果用户的算法同时执行涉及标识的目标量子位和任何其他数据量子位的操作,则可以对这些相关数据量子位应用Z校正。一旦Z校正被延迟,它们可以传播到其他量子位。可以经典地跟踪一组这样的相关量子位。
图5是用于操作量子计算设备的示例方法500。可以制定方法500,以便能够在量子计算设备的量子平面内延迟执行n量子位门。方法500可以与方法400结合、作为方法400的扩展或独立执行。
在510处,方法500包括接收在一组n目标量子位上执行第一n量子位门的请求,该n量子位门包括对角门和由多量子位克利福德门共轭的对角门中的一个或两者。该请求可以在量子计算设备的控制器处接收,并且一组n目标量子位可以由该控制器定义。如关于方法400所述,n可以是整数个量子位,使得n≥1。在520处继续,方法500包括标识一组n接口量子位,在该n接口量子位上执行第一n量子位门。在这个例子中,每个接口量子位可能位于其对应的目标量子位的局部或远程。
在530处,方法500包括对每个目标量子位及其对应接口量子位执行联合Z-Z测量。此类测量可通过任何合适的方法进行,例如但不限于图4中430所述的方法。在一些示例中,除了联合Z-Z测量之外,还进行了多量子位泡利测量,或作为联合Z-Z测量的备选方法。在540处,方法500包括在一组n接口量子位上执行第一n量子位门。
在550处,方法500包括在完成对一组n接口量子位上的第一n量子位门的执行之前,对n目标量子位中的一个或多个执行计算。这允许并行执行分配给同一组目标量子位的门。如关于图4所述,响应于对每个目标量子位及其对应接口量子位和/或相关贝尔对执行联合Z-Z测量,可以对n目标量子位中的一个或多个进行计算。
在560处,方法500包括接收对一组n目标量子位执行第二n量子位门的请求。换句话说,第二n量子位门可以在不等待目标量子位的泡利校正的情况下执行。在接口量子位上对角门执行完成之前可以启动的门包括但不限于SWAP、泡利、奇偶性测量和对角门的任何组合;以及克利福德、SWAP、多量子位泡利测量和泡利门的任何组合(SWAP和泡利门是克利福德门的特例)。局部执行的门,诸如克利福德门和SWAP门,可以在一组n目标量子位上执行。
因此,在570处,方法500包括,在完成对一组n接口量子位上的第一n量子位门的执行之前,在一组n目标量子位上启动第二n量子位门的执行。在一个或多个接口量子位也是目标量子位的示例中,在第一n量子位门执行完成之前,这样的量子位可能不会被重用。如果根据主持算法,第二n量子位门最初不需要这样一个量子位,那么在第一n量子位门执行完成之前,第二n量子位门的执行仍然可以启动。
在580处,如图4的450所述,方法500包括至少对一组n目标量子位和n接口量子位执行经典跟踪和校正。如在550处所述,在对目标量子位进行计算的同时,可以执行此类跟踪。
关于图4和图5所示的方法可以进一步推广用于更广泛的适用性。例如,量子计算机的方法可以包括接收在一组目标量子位上执行n量子位门的请求,其中n是整数且n>1,其中n量子位门是由n量子位克利福德门共轭的m量子位对角门,其中m是整数且m≤n、克利福德门可以是任何单量子位或多量子位克利福德门,包括恒等式门。然后,量子计算设备可以标识一组m接口量子位,在其上执行m量子位对角门。m接口量子位可以位于其对应目标量子位的局部、远程或其任意组合。
这样的方法可以包括在每个接口量子位及其对应的目标量子位上执行克利福德操作。克利福德操作可以包括单个或多量子位克利福德单位,和/或单个或多量子位泡利测量。这种多量子位泡利测量可以通过本文所述的预先建立的纠缠、贝尔对或任何其他方式来执行。然后可以在一组m接口量子位上执行m量子位对角门。在一些示例中,克利福德操作包括接口量子位上X控制的多量子位泡利门。X控制的多量子位泡利门可以采用矩阵
在完成对一组m接口量子位上的第一m量子位对角门的执行之前,可以对n目标量子位中的一个或多个进行计算。量子计算设备可以接收在一组n'目标量子位上执行n'量子位门的请求,该组n'目标量子位包括n目标量子位中的一个或多个。N”可以等于n,也可以是较大或较小的整数。在完成对一组m接口量子位上的第一m量子位对角门的执行之前,可以在一组n'目标量子位中启动n'量子位门的执行。可以在指示多量子位泡利校正的一组n目标和n'目标量子位内标识一个或多个量子位。
为了在一组m接口量子位上完成m量子位对角门的执行,可以沿着一组m接口量子位的X测量自旋。可以存储X的测量自旋值,并且可以至少对标识的目标量子位执行多量子位泡利校正。
使用本文描述的方法,任何对角n量子位门的执行都可以延迟、远程执行或两者都可以。远程执行可以通过消耗n贝尔状态并执行局部泡利门和局部联合泡利测量来执行。例如,可以使用CCZ门延迟远程执行的情况来演示这种方法,这是通过消耗三个贝尔对来执行的。本领域技术人员将认识到,CCZ门的以下证明适用于由n量子位克利福德门共轭的任何n量子位对角门或m量子位对角门的一般情况,其中m是整数,m 图6A示出了用于经由三个接口量子位(615、616、617)在三个目标量子位(610、611、612)上延迟远程执行CCZ门605的示例电路600。左侧620表示经典CCZ门,而右侧625表示延迟的远程执行CCZ门。标有“X”并被位于电路600右侧的虚线(630、631、632)包围的门表示三个目标量子位(610、611、612)中的每一个的状态为X的+1本征态(eigenstate)。箭头从标记为X的量子位开始延伸,并被指向寄存器(r 命题1.1:如图6所示,电路620和625是等效的。右侧的电路(电路625)在三个接口量子位(615、616、617)上执行CCZ门(605),并将目标量子位(610、611、612)返回泡利X的+1本征态。 图6B中示出了更通用的电路650。电路650可用于延迟和/或远程执行一系列门655,包括三量子位克利福德门(C)657、两量子位对角门(D)658和三量子位逆克利福德门(C 如关于图3所述,图6的电路600中的目标量子位(610、611、612)和接口(615、616、617)量子位可以位于量子计算机的不同部分。要在接口量子位(616、617、618)上执行CCZ门,只需执行成对接头 这个结果可以通过使用一系列电路变换来显示,如图7-16所示。证明包括三个主要阶段。首先,电路中的所有测量值都替换为±π/4的泡利算子 回到图6,电路600的650部分用虚线表示。图7显示了可应用于部分650的电路恒等式700。电路恒等式700说明了 命题1.2:让|ψ>为n量子位状态,让泡利算子Q稳定|ψ>,即Q|ψ>=|ψ>。考虑到与Q反交换的n量子位泡利算子P,那么,在-1的结果下,用校正Q对P进行测量,相当于应用单元 为了证明这一点,首先确定测量P的结果是+1还是-1,概率为1/2。实际上,测量+1的概率为
因此,测量+1和-1的概率是相同的,它们的总和是1。因此,每个测量结果的概率为1/2。这意味着在+1结果的情况下,状态变为 由于上述反交换命题中的P和Q,存在来自 电路800中的 如图9所示,该电路恒等式1000可应用于断言门911、912和913以及其他类似子电路。这将用-π/4泡利指数替换其余的X测量。根据命题1.2,图10中所示的电路恒等式与图7中所示类似。X的结果测量替换如图11所示,电路1100指示将图10的恒等式应用于图9并重新排序量子位的结果。 如下面的命题1.3所述,并由图12中的电路1200所示,下一步是将CCZ门表示为泡利算子七个指数的乘积,其中显示了CCZ门作为泡利指数乘积的分解。 命题1.3:双控Z门CCZ可表示为:
其中<-Z 为了证明这一点,CCZ门可以写成exp(iπ|111><111|),使用事实|1><1|=(1-Z)/2,可以看出:
这里,
记住这一点有助于了解CCZ门的证明如何推广到任意n量子位门。 使用CCZ门的分解可得到图13所示的量子电路1300,其中量子电路1100通过将CCZ门替换为根据泡利算子指数进行的分解来进行转换。此外,电路1300包括相互抵消的插入泡利指数门,如1310所示。 命题1.4:让P和Q是n量子位泡利算子。那么 同样,如果P和Q交换, 作为证明,如果P和Q交换,那么
如果P和Q不交换,它们必须反相交,因此
因为对于任何矩阵A、B,Aexp(B)A 图14示意性地示出了命题1.4之后的示例恒等式电路1400,显示了π/4泡利指数的共轭如何变换其他泡利指数。通过插入泡利指数门,该恒等式可应用于电路1300的轮廓部分1325。 将命题1.4和电路1400的恒等式反复应用于电路1300,可以转换所有±π/8泡利指数,并去除所有±π/4泡利指数,从而得到图15所示的示例量子电路1500。 命题1.5:让|ψ>是n量子位状态,并且让泡利算子Q稳定化|ψ>,即让Q|ψ>=|ψ>。对于任何与Q交换的算子P,exp(iφP)|ψ>=exp(iφQP)|ψ>。 作为证明,回顾
因为P和Q交换,积PQ是赫米特算子,并且 该命题允许通过从指数中删除X项来进一步简化图15的概述部分1510。该命题导致如图16所示的电路恒等式1600和1610。反复将命题1.5应用于电路1500,会从泡利指数中删除所有X,并且左手侧和右手侧电路的等效性来自如图12所示的CCZ的七个泡利指数分解。 尽管量子计算机有能力,但随着时间的推移,它们的吞吐量仍然有限。本文所公开的方法能够在这种资源受限的量子计算机内进行高级构造。远程和延迟执行方法允许实现丰富的算法类,因为它们消除了分解每个算子的要求,然后依赖于标准方法在静态布局上实现算子。换句话说,以上提供了一种在其他门中远程执行对角n量子位门的直接方法。 对角n量子位门可能需要较长时间才能执行。本文描述的方法通过启用并行执行,在执行量子算法时节省了时间。对角n量子位门可以在量子计算机执行其他操作时并行执行。量子计算机可以有效地分为两个域:一个用于执行对角n量子位门,并且一个用于执行所有其他门。这加快了量子算法的执行,更快地返回解决方案。 量子计算的主要目标是解决具有商业价值的问题。目前,这是通过使用量子纠错协议和容错协议来实现的。目前存在一种主要的容错协议(格子手术表面代码)。该协议是通过一组特定的基本操作制定的。本文描述的方法可以作为这些基本操作的附加部分来实现。这种方法对于大型量子计算机以及希望提高资源利用率的小型(如100量子位)计算机都很有价值。 作为一个示例,一种用于操作量子计算设备的方法,包括接收在一组n目标量子位上执行第一n量子位门的请求,该n量子位门包括由多量子位克利福德门共轭的对角门和对角门中的一个或两个;标识要在其上执行第一n-量子位门的一组n接口量子位,该组n接口量子位位于一组n目标量子位之外;经由预先建立的纠缠,对每个目标量子位及其对应的接口量子位执行联合Z-Z测量;以及在一组n接口量子位上执行第一n量子位门。在这样的示例或任何其他示例中,每个远程定位的接口量子位附加地或备选地位于不相邻于相应目标量子位的位置。在上述任一示例或任何其他示例中,预先建立的纠缠另外或备选地包括一组n贝尔对,使得每个贝尔对的第一量子位局部定位到n目标量子位的第一量子位,并且贝尔对的第二量子位局部定位到n接口量子位的第一量子位。在上述任一示例或任何其他示例中,该方法额外或备选地包括通过经典跟踪识别指示Z校正的一组n目标量子位中的一个或多个量子位。在上述任何示例或任何其他示例中,该方法额外或备选地包括,响应于在一组n接口量子位上完成第一n量子位门的执行,测量一组n接口量子位上沿X的自旋;存储X的测量自旋值;以及经由经典跟踪标识指示Z校正的一组n接口量子位中的一个或多个量子位。在上述任一示例或任何其他示例中,该方法额外或备选地包括至少对标识的目标量子位和标识的接口量子位执行Z校正。在上述任何一个示例或任何其他示例中,第一n量子位门额外或备选地是对角n量子位量子门。在上述任一示例或任何其他示例中,第一n量子位门作为一组2个或多个门的一部分额外或交替执行。 在另一示例中,一种用于操作量子计算设备的方法包括接收在一组n目标量子位上执行第一n量子位门的请求,该n量子位门包括对角门和由多量子位克利福德门共轭的对角门中的一个或两者;标识要对其执行第一n量子位门的一组n接口量子位;对每个目标量子位及其相应接口量子位执行联合Z-Z测量;在一组n接口量子位上执行第一n量子位门;以及在完成对一组n接口量子位的第一n量子位门的执行之前,对该n目标量子位中的一个或多个执行计算。在这样的示例或任何其他示例中,该方法额外或备选地包括接收在一组m目标量子位上执行m量子位门的请求,该组m目标量子位包括一组n目标量子位中的一个或多个;以及在完成对一组n接口量子位上的第一n量子位门的执行之前,在一组m目标量子位上启动m量子位门的执行。在上述任一示例或任何其他示例中,该方法额外或备选地包括经由经典跟踪识别指示Z校正的一组n目标量子位中的一个或多个量子位。在上述任何示例或任何其他示例中,该方法额外或备选地包括响应于在一组n接口量子位上完成第一n量子位门的执行,测量一组n接口量子位上沿X的自旋;存储X的测量自旋值;以及经由经典跟踪标识指示Z校正的一组n接口量子位中的一个或多个量子位。在上述任一示例或任何其他示例中,该方法额外或备选地包括至少对标识的目标量子位和标识的接口量子位执行Z校正。在上述任何一个示例或任何其他示例中,第一n量子位门额外或备选地是对角n量子位量子门。在上述任一示例或任何其他示例中,第一n量子位门作为一组2个或多个门的一部分额外或交替执行。在上述任一示例或任何其他示例中,一组n接口量子位中的一个或多个量子位额外地或备选地远离一组n目标量子位。 在又一个示例中,量子计算机的方法包括接收在一组n目标量子位上执行n量子位门的请求,其中n是整数且n≥1,其中n量子位门是由n量子位克利福德门共轭的m量子位对角门,其中m是整数且m≤n;标识要在其上执行m量子位对角门的一组m接口量子位;对每个接口量子位及其对应的目标量子位执行多量子位泡利测量;在一组m接口量子位上执行m量子位对角门;在完成对一组m接口量子位执行第一m量子位对角门之前,对n目标量子位中的一个或多个执行计算;接收在一组n'目标量子位上执行n'量子位门的请求,该组n'目标量子位包括n目标量子位中的一个或多个;在完成对一组m接口量子位上的第一m量子位对角门的执行之前,在一组n'目标量子位上启动n'量子位门的执行;标识一组n目标和n'目标量子位中的一个或多个量子位,其中指示了多量子位泡利校正;响应于在一组m接口量子位上完成m量子位对角门的执行,测量一组m接口量子位上沿X的自旋;存储X的测量自旋值;并至少对所标识的目标量子位执行多量子位泡利校正。在这样的示例或任何其他示例中,一组m接口量子位中的一个或多个额外地或备选地远离对应的目标量子位。在上述任一示例或任何其他示例中,多量子位泡利测量经由接口量子位与对应目标量子位之间预先建立的纠缠额外或交替地执行。在上述任何示例或任何其他示例中,克利福德门是额外的或备选的恒等式门。 在又一个示例中,一种用于操作量子计算设备的方法包括接收在一组n目标量子位上执行第一n量子位门的请求,第一n量子位门可表示为由克利福德门共轭的m量子位对角门;标识要在其上执行量子位对角门的一组m接口量子位;对每个接口量子位及其对应的目标量子位执行克利福德操作;以及在一组m接口量子位上执行m量子位对角门。在这样的例子或任何其他例子中,对接口量子位和对应的目标量子位执行的克利福德操作是额外的或备选的多量子位泡利测量。在上述任一示例或任何其他示例中,通过使用预先建立的纠缠额外或交替地执行多量子位泡利测量。在上述任何示例或任何其他示例中,对接口量子位和对应目标量子位执行的克利福德操作额外或备选地在接口量子位上控制多量子位泡利门X。在上述任一示例或任何其他示例中,使用预先建立的纠缠额外或备选地执行接口量子位上控制的多量子位泡利门X。 在另一示例中,一种操作量子计算设备的方法包括接收在一组n目标量子位上执行第一n量子位门的请求,第一n量子位门可表示为与克利福德门共轭的m量子位对角门,其中m≤n;标识要在其上执行m量子位对角门的一组m接口量子位;对每个接口量子位及其对应的目标量子位执行克利福德操作;在一组m接口量子位上执行m量子位对角门;以及在完成对一组m接口量子位上的m量子位对角门的执行之前,对n目标量子位中的一个或多个执行计算。在这样的例子或任何其他例子中,对接口量子位和对应的目标量子位执行的克利福德操作是额外的或备选的多量子位泡利测量。在上述任一示例或任何其他示例中,通过使用预先建立的纠缠额外或交替地执行多量子位泡利测量。在上述任何示例或任何其他示例中,对接口量子位和对应目标量子位执行的克利福德操作额外或交替地在接口量子位上控制多量子位泡利门X。在上述任一示例或任何其他示例中,使用预先建立的纠缠额外或交替地执行接口量子位上控制的多量子位泡利门X。在上述任一示例或任何其他示例中,该方法额外或备选地包括接收请求,以在一组n'目标量子位上执行n'量子位门,该组n'目标量子位包括n目标量子位中的一个或多个;以及在完成一组m接口量子位上的m量子位对角门的执行之前,在该组上的n'目标量子位上启动n'量子位门的执行。在上述任何一个例子中,或在完成对一组m接口量子位上的m量子位对角门的执行之前,对一组n'目标量子位执行n'量子位门的任何其他例子中,对接口量子位和对应目标量子位执行的克利福德操作是额外的或备选的多量子位泡利测量。在上述任一示例或任何其他示例中,通过使用预先建立的纠缠额外或交替地执行多量子位泡利测量。在上述任何示例或任何其他示例中,对接口量子位和对应目标量子位执行的克利福德操作额外或交替地在接口量子位上控制多量子位泡利门X。在上述任一示例或任何其他示例中,使用预先建立的纠缠额外或交替地执行接口量子位上控制的多量子位泡利门X。在上述任何一个示例或任何其他示例中,该方法额外或备选地包括标识指示多量子位泡利校正的的一组n目标量子位和n'目标量子位中的一个或多个量子位;响应于在一组m接口量子位上完成m量子位对角门的执行,测量一组m接口量子位上沿X的自旋;以及存储X的测量自旋值。在上述任一示例或任何其他示例中,该方法额外或备选地包括对至少标识的目标量子位执行多量子位泡利校正。在上述任何示例中,或在至少对所标识的目标量子位执行多量子位泡利校正的任何其他示例中,对接口量子位和对应目标量子位所执行的克利福德操作是额外的或备选的多量子位的泡利测量。在上述任一示例或任何其他示例中,通过使用预先建立的纠缠额外或交替地执行多量子位泡利测量。在上述任何示例或任何其他示例中,对接口量子位和对应目标量子位执行的克利福德操作额外或交替地在接口量子位上控制多量子位泡利门X。在上述任一示例或任何其他示例中,使用预先建立的纠缠额外或交替地执行接口量子位上控制的多量子位泡利门X。 应当理解,本文所述的配置和/或方法在本质上是示例性的,并且这些具体实施例或示例不应在限制意义上考虑,因为可能存在许多变化。本文所述的特定例程或方法可以代表任何数目的处理策略中的一个或多个。因此,所示和/或描述的各种行为可以按照所示和(或)描述的顺序、其他顺序、并行或省略被执行。同样,上述过程的顺序可能会改变。 本公开的主题包括本文公开的各种过程、系统和配置以及其他特征、功能、行为和/或属性的所有新颖和非显而易见的组合和子组合,以及其任何和所有等价物。
- 实现双量子位门的方法、电路以及量子器件、量子芯片
- 基于多量子位门的量子计算机架构