一种太赫兹MIMO无人机非平稳性信道建模方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及通信技术领域,尤其涉及一种太赫兹MIMO无人机非平稳性信道建模方法。
背景技术
继第五代(Fifth Generation,5G)规模移动通信网络服务商用后,全球业界已经开展了对第六代(Sixth Generation,6G)的研究。作为面向第六代移动通信网络服务的太赫兹频段(95GHz-3THz)的无线通信技术,已经成为学界研究的热点。太赫兹作为微波与毫米波的延伸,它能够提供的带宽远大于毫米波。太赫兹用于通信可以获得10GB/s的无线传输速度,是当前超宽带技术速率的百倍,可以作为很好的宽带信息载体。并且,与可见光和红外相比,太赫兹波具有极高的方向性和较强的云雾穿透能力,可以满足以极高的带宽进行高保密卫星通信。为了充分掌握太赫兹的传播特性,对太赫兹信道的研究是一个重点研究内容。
在无线移动通信中,所有信息都要通过无线信道来传播,电波的传播特征和无线信道建模,作为实现无线系统规划的唯一手段,是通信系统架构设计和新技术验证的重要基础和前提。信道模型在无线通信系统设计和性能评估中是必不可少的。
近年来,空对空(Air to air,A2A)通信由于其在高空平台(High AltitudePlatform,HAP)和无人驾驶飞行器(Unmanned Aerial Vehicle,UAV)等众多应用中的潜力而受到广泛关注。A2A网络可以作为传感器平台在网络受损等紧急情况下实现远程位置覆盖,或者作为低成本基础设施在拥挤区域如体育场中提供流量卸载。
UAV具有高机动性和低成本,在民用和商业领域出现了很多新的应用,典型应用场景包括气象监测,森林火灾探测、交通控制、货物运输、紧急搜索和救援、通信中继等等。与HAP相比,低空UAV的重要优势有:第一,UAV价格低廉且容易布置,因此更适用于突发且有限时间的任务;第二,UAV多数情况下都可以建立视距/直达路径(Line of sight,LoS)通信链路从而获得可靠的通信性能;第三,UAV的机动性可以通过动态调整状态来提升性能,例如自适应通信可以与UAV的移动性控制结合等。
与传统的车对车(vehicle to vehicle,V2V)和移动对移动(mobile to mobile,M2M)通信方式不同,无人机在三维空间中同时包含水平域和垂直域,且飞行高度相对较低,需要考虑建筑物,路边障碍物等散射成分。由于空中基站和地面操作人员的流动性,导致非平稳信道中有不可忽视的时间和空间变化。严重的非平稳性会引起大量的覆盖和连接问题。因此,传统的信道模型不能直接应用于无人机通信场景,为了对无人机通信系统进行设计和评估,保证通信的安全性和高可靠性,建立一种能够准确捕捉无人机通信特性的信道模型是必不可少的。
目前针对太赫兹波段多输入多输出(Multiple-Input Multiple-Output,MIMO)信道建模的研究,主要根据其适合短距离传输的特点针对室内和微系统场景开展信道探测与建模,考虑室外环境的较少。而考虑室外环境的也局限于基站与用户的点对点LoS传播,针对复杂场景的信道特征研究分析较少。但太赫兹波的应用场景还有很大空间可以挖掘。由于太赫兹波在外层空间中基本可以做到无损传播,通过极低的功率就可以实现超远距离传输。如果未来太赫兹天线系统可以实现小型化、平面化,太赫兹通信系统可通过搭载卫星、无人机、飞艇等天基平台和空基平台,作为无线通信和中继设备,应用于卫星集群间、天地间和千公里以上的星间高速无线通信场景,实现未来的空天地海一体化通信。
目前,根据现有的无人机通信研究结果,基于无人机的信道模型可以分为确定性模型、非几何随机模型(non-geometrical stochastic model,NGSM)和基于几何的随机模型(geometry-based stochastic model,GBSM)。确定性模型具有很高的精度,但需要大量的数据来表征特定的传播环境,该模型可用于研究信道中的大尺度衰落效应,准确的传播条件可以提供覆盖分析,并指示无人机的最佳位置。而NGSM是基于测量数据的,具有一定的复杂性。与上述建模方法不同,GBSM方法具有较高的精度和较低的复杂度,适合在环境参数较少的三维平面中表征信道,可广泛用于模拟各种无线信道。
现有技术对室内及微系统中太赫兹波传播信道的数据采集与处理研究得到的模型,大部分是固定的发射端与接收端,没有考虑动态环境下信道的非平稳性,因此也没有针对信道时间相关性,空间相关性和多普勒谱等相关时变特性的研究。
而现有采用GBSM仿真的方法建模得到的太赫兹信道模型与信道分析,一方面频段还集中于5G/B5G,关于太赫兹频段的研究较少。因为信道的特性会随着频率的提高而发生变化,所以原有的模型无法满足太赫兹频段的需求。另一方面现有工作局限在空对地(air-to-ground,A2G)信道建模,与A2G相比,A2A包含水平和垂直两个方向,Tx和Rx都可以在3D空间中移动。因此,A2G移动模型不能直接表征A2A通信场景下无人机终端的运动行为。
发明内容
针对目前太赫兹MIMO信道建模缺乏基于UAV的A2A非平稳性模型的问题,为了填补现有模型的不足,本发明基于GBSM建模方法,对太赫兹MIMO信道进行建模和特性分析,提出一种太赫兹MIMO无人机非平稳性信道建模方法,不仅考虑了更复杂的场景和更实用的移动性模型,还分析了更多参数对信道特性的影响。
为了实现上述目的,本发明提供如下技术方案:
一方面,本发明提供了一种太赫兹MIMO无人机非平稳性信道建模方法,使用以收发端无人机位置为球心的双球体表征近距离散射体,使用以收发端无人机位置为球心的三维椭球表征远距离散射体,根据A2A信道特征,结合LoS分量、近散射体和远散射体分别产生的SB分量和DB分量,描述收发端周围的多径分量分布情况,建立无人机宽带非平稳A2A信道的三维椭球与双球复合几何模型;基于几何的随机模型,推导复合几何模型时变时频自相关函数和多普勒功率谱密度的表达式,建立太赫兹MIMO无人机非平稳性信道模型。
进一步地,收发端无人机分别包含A
MIMO信道的第p个T
其中,
进一步地,直达路径信道冲激响公式为:
其中,K为莱斯因子,ε
Φ
Ψ
单反射径信道冲激响公式为:
其中,近散射体:
远散射体:
双反射径信道冲激响公式为:
进一步地,散射角的水平角服从VM分布,表示如下:
其中,I
进一步地,散射角的垂直角服从有上下限的余弦分布,表示如下:
其中,β
进一步地,时变时频自相关函数表示为:
其中,LoS径部分表示为:
单反射径部分表示为:
双反射径部分表示为:
进一步地,多普勒功率谱密度表达式为:
另一方面,本发明还提供了上述的太赫兹MIMO无人机非平稳性信道建模方法在太赫兹频段或毫米波频段非平稳的无人机间通信场景中的应用。
与现有技术相比,本发明的有益效果为:
本发明提出的太赫兹MIMO无人机非平稳性信道建模方法,首先建立了无人机宽带非平稳A2A信道的三维椭球与双球复合几何模型,该模型结合了LoS分量、单反射(single-bounced,SB)和双反射(double-bounced,DB)分量,描述收发端周围的多径分量分布情况。然后根据提出的GBSM,推导了其时变时频自相关函数和多普勒功率谱密度的表达式。最后提供了一种基于几何的3D太赫兹MIMO随机信道模型,该方法适用于6G密集城区环境,使用椭球表征远距离散射体,球体表征近距离散射体,在时间、空间和频率域中对参数进行初始化和演化,生成完整的信道传递函数,并可进行相关性分析。该模型具有通用性和适应性,可以用于模拟各种非平稳的无人机间通信场景。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
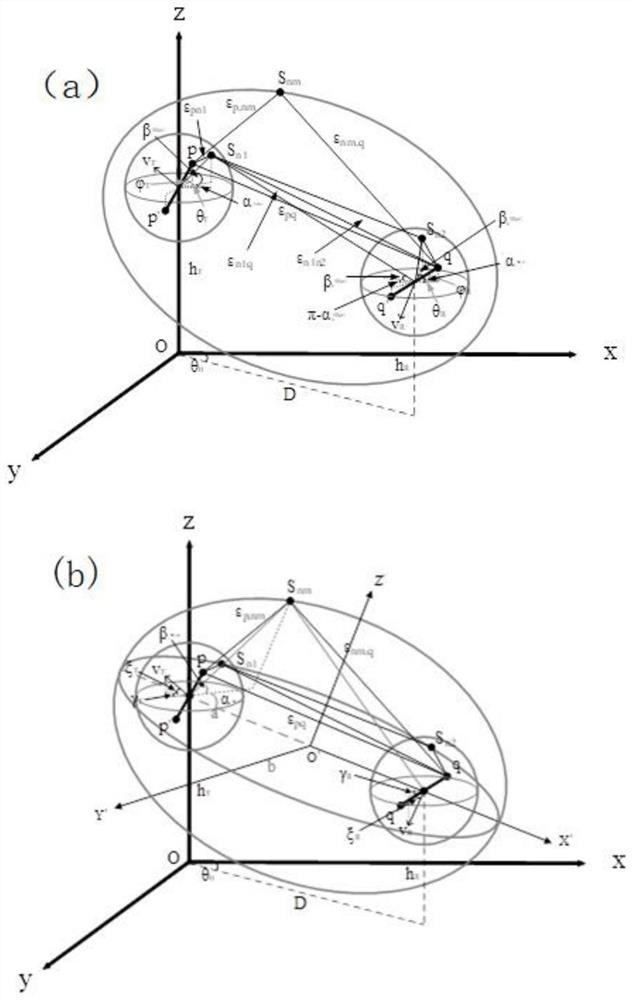
图1为均匀线形阵列MIMO系统示意图。其中,(a)为仅显示LoS部分和双球上反射线几何关系的所提出结合了两球和椭球的三维MIMO GBSM,(b)为仅显示椭球上反射线几何关系的所提出结合了两球和椭球的三维MIMO GBSM。
图2为本发明实施例提供的通信频段对时间相关性的影响。
图3为本发明实施例提供的无人机相对速度大小对Doppler功率谱的影响。
具体实施方式
为了更好地理解本技术方案,下面结合附图对本发明的方法做详细的说明。
本发明所针对的RS-GBSM模型(Regular-Shaped Geometry-Based StochasticModel,规则几何形状的非确定性模型)如图1所示。为了使所提出的信道模型一般化,模型中包含了所有可能的信道分量,根据现有的A2A信道测量数据,LoS分量在开阔环境中发挥重要作用,散射分量在复杂环境中发挥更大作用。图1给出了模型的总体描述,包括LoS分量,近散射体和远散射体产生的SB、DB散射分量。散射体的移动对A2A信道产生的影响可以忽略不计。MT(Mobile Transmitter)表示移动发射端,MR(Mobile Receiver)表示移动接收端,AAoA(Azimuth Angle of Arrival)表示接收端到达角的水平角度,AAoD(AzimuthAngle of Departure)表示发射端离开角的水平角度,AoA(Angle of Arrival)表示接收角度,AoD(Angle of Departure)表示发射角度,EAoA(Elevation Angle of Arrival)表示接收端到达角的俯仰角度,EAoD(Elevation Angle of Departure)表示发射端离开角的俯仰角度。
椭球方程为:
各符号定义如下表所示:
本发明的太赫兹MIMO无人机非平稳性信道建模方法,使用以收发端无人机位置为球心的双球体表征近距离散射体,使用以收发端无人机位置为球心的三维椭球表征远距离散射体,根据A2A信道特征,结合LoS分量、近散射体和远散射体分别产生的SB分量和DB分量,描述收发端周围的多径分量分布情况,建立无人机宽带非平稳A2A信道的三维椭球与双球复合几何模型;基于几何的随机模型,推导模型时变时频自相关函数和多普勒功率谱密度的表达式,建立太赫兹MIMO无人机非平稳性信道模型。
具体地,如图1和图2所示,收发端无人机分别包含A
近散射体覆盖范围用球体表示,远处散射体覆盖范围用以收发无人机位置为球心的椭球表示。
根据时间延迟线(time delay line,TDL)模型的概念,MIMO信道的第p个T
其中,
直达路径信道冲激响公式为:
其中,K为莱斯因子,ε
发射端与接收端的移动速度可以表示为:
Φ
Ψ
单反射径信道冲激响公式为:
其中,近散射体:
远散射体:
双反射径信道冲激响公式为:
散射角的水平角服从VM分布,因为它更适合描述散射角的统计特性。表示如下:
其中,I
由于散射体分布范围的高度有限,散射角的垂直角服从有上下限的余弦分布,表示如下:
其中,β
本发明的以上模型在前人研究的基础上考虑了不同无人机高度和A2A俯仰角对散射区域的影响,并对其信道的统计特征——时变时频自相关函数和多普勒功率谱密度进行推导分析如下。
时变时频自相关函数(STCF)表示为:
其中,LoS径部分表示为:
单反射径部分表示为:
双反射径部分表示为:
多普勒功率谱(PSD)密度表达式为:
本发明还提供了上述的太赫兹MIMO无人机非平稳性信道建模方法在太赫兹频段或毫米波频段非平稳的无人机间通信场景中的应用。
针对密集城区UAV通信场景,采用参数为:D=100m,
采用参数为:D=100m,
综上,本发明对太赫兹波段的非平稳性信道进行建模,针对当前太赫兹波的信道特性还未被充分认识的问题,提出了基于TDL模型的新型太赫兹波段三维宽带非平稳A2AGBSM来描述密集城区传输信道,该模型具有通用性和适应性,可以用于模拟各种非平稳的无人机间通信场景。
此外,本发明的信道建模方法,不仅限于文中作为实施例的太赫兹频段(100GHz~10THz),同样适用于毫米波频段。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,但这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种无人机非平稳空对空MIMO信道的几何随机建模方法
- 一种无人机非平稳空地MIMO信道的几何随机建模方法