一种前桥圆管定位焊接设备
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及汽车零部件技术领域,具体为一种前桥圆管定位焊接设备。
背景技术
前桥多为从动桥,又称为转向桥,一般均布在车辆的前端,是传递车架与前轮之间各向作用力及其所产生的弯矩和转矩的装置。
前桥利用转向节与转向系相连,能够使转向器输出的转向力传递到车轮以实现车辆的转向。它不但支持车辆前部的簧载质量,承受垂直载荷,还承受各种纵向力、侧向力以及相关力矩。各种类型汽车的转向桥构造基本相同,主要由前轴、转向节、主销和轮毂等四部分组成。
前轴有工字形结构和圆管形结构,在对圆管形前轴进行定点焊接时,主要是由人工进行测量间距并划线,然后将对应焊接的支座扶持稳定在前轴的表面进行焊接操作,此过程存在的问题有:人工划线来定支座间距造成的误差较大,影响对接的准确性且人工划线花费时间多,影响焊接效率;人工扶持焊接时,工人不仅会有被焊接火星灼伤的危险,也会因扶持不稳定造成支座焊歪,导致两支座位置不对称。
发明内容
为了解决上述技术问题,本发明提供一种前桥圆管定位焊接设备。
一种前桥圆管定位焊接设备,包括承接调整机构、定位夹持机构与焊接机器人,所述承接调整机构后端固定连接有定位夹持机构,定位夹持机构上左右对称固定连接有焊接机器人。
所述定位夹持机构包括控制机体、伸缩定位件、方形定位件、动力输入件、定位滑移件、校准夹持组件、定位阻挡件一与双向螺纹杆一,承接调整机构后端固定连接有控制机体,控制机体上连接有伸缩定位件,伸缩定位件前端固定安装有方形定位件,方形定位件上端固定安装有动力输入件,方形定位件下端中部开设有齿轮安装槽,方形定位件下端左右对称以滑动配合的方式连接有定位滑移件,定位滑移件下端固定连接有校准夹持组件,方形定位件左右两端均固定安装有定位阻挡件一,定位阻挡件一之间转动连接有双向螺纹杆一,双向螺纹杆一中部固定连接有动力输入件,双向螺纹杆一与定位滑移件之间以螺纹配合的方式相连接。
所述校准夹持组件包括倒L形定位件、电动伸缩杆、H形连接件、转动连接件一、平衡夹紧件与定位夹紧件,定位滑移件下端固定连接有倒L形定位件,倒L形定位件的水平平面下端固定连接有电动伸缩杆,电动伸缩杆下端固定安装有H形连接件,H形连接件上左右对称转动连接有转动连接件一,转动连接件一共同转动连接有平衡夹紧件,倒L形定位件的竖直平面前端固定安装有定位夹紧件。
优选技术方案一:所述承接调整机构包括固定工作台、滑移轨道、定位阻挡件二、配合滑移件、伸缩防护件、动力电机与双向螺纹杆二,固定工作台上端中部开设有方形凹槽,固定工作台上端且位于方形凹槽前后两侧对称固定安装有滑移轨道,滑移轨道左右两端均固定安装有定位阻挡件二,滑移轨道上端左右对称以滑动配合的方式连接有配合滑移件,配合滑移件之间且位于滑移轨道上侧固定连接有伸缩防护件,固定工作台左端通过电机座一固定安装有动力电机,动力电机输出轴右端穿过左侧的定位阻挡件一固定连接有双向螺纹杆二,双向螺纹杆二与配合滑移件之间以螺纹连接的方式相配合,双向螺纹杆二与定位阻挡件二之间以转动连接的方式相配合。
优选技术方案二:所述平衡夹紧件包括夹持主件一、夹持主件二、定位杆件、转动连接件二、圆柱连接件、承接固定件与圆柱压杆,左侧转动连接件一下端转动连接有夹持主件一,右侧转动连接件一下端转动连接有夹持主件二,夹持主件一与夹持主件二上均开设有限行通孔,夹持主件一与夹持主件二通过定位杆件相铰接,定位杆件后端与倒L形定位件固定连接,夹持主件一与夹持主件二上均转动连接有转动连接件二,两个转动连接件二通过圆柱连接件相铰接,圆柱连接件两端共同固定连接有承接固定件,承接固定件上固定连接有圆柱压杆,圆柱压杆与限行通孔之间活动连接。
优选技术方案三:所述定位夹紧件包括固定套筒、定位圆环、连接弹簧、滑动块与一字定位件,倒L形定位件的竖直平面前端固定安装有固定套筒,固定套筒前端外壁固定连接有定位圆环,固定套筒内部前端固定连接有连接弹簧,连接弹簧前端固定连接有滑动块,滑动块与固定套筒之间以滑动配合的方式相连接,滑动块前端转动连接有一字定位件。
优选技术方案四:所述动力输入件包括微型电机、带轮、主动轮、传动带与从动轮,方形定位件上端通过电机座二固定安装有微型电机,微型电机输出轴右端固定安装有带轮,齿轮安装槽内转动连接有主动轮,带轮与主动轮之间通过传动带相连接,主动轮与从动轮相啮合,从动轮固定连接在双向螺纹杆一上。
优选技术方案五:所述夹持主件一与夹持主件二的相对端面均固定连接有平面夹紧件。
优选技术方案六:所述配合滑移件的承接端面上均匀转动连接有转动圆柱。
本发明具备以下有益效果:1、本发明提供的一种前桥圆管定位焊接设备中设置的承接调整机构,通过双向螺纹杆二转动带动配合滑移件向相反的方向移动,直到配合滑移件远离伸缩防护件的端面贴合在前轴突出端后停下,此时前轴位置居中,设置的定位夹持机构,将两个支座挂置在校准夹持组件上,启动校准夹持组件上的控制开关来对支座进行平衡夹紧,通过动力输入件输出的转动力带动双向螺纹杆一进行转动,双向螺纹杆一转动使得定位滑移件按设定距离值进行移动调整,两个支座间的距离固定后再由伸缩定位件进行伸缩调整并下移,使得支座能够稳定贴合在前轴端面。以上机构的配合设置,既能提高焊接效率,又能实现机械化精准定位。
2、本发明设置的校准夹持组件,通过定位夹紧件对支座进行挂接固定,之后电动伸缩杆带动H形连接件向上移动,再通过转动连接件一使得平衡夹紧件对支座进行夹持与校准,定位夹紧件与平衡夹紧件的配合使得定位滑移件与伸缩定位件在进行移动调整时,支座不会发生偏移与掉落,最终能够稳定贴合在前轴表面进行焊接。
3、本发明设置的定位夹紧件,通过向前拉动一字定位件使得滑动块向外伸出一截,此时利用支座中间的孔将支座挂接于滑动块上,再转动一字定位件于水平状态防止支座脱落,通过连接弹簧将滑动块向内拉使得支座被夹在定位圆环与一字定位件之间。
4、本发明设置的平衡夹紧件,通过夹持主件一与夹持主件二对支座的外端面进行固定夹紧,同时夹持主件一与夹持主件二相对靠近的过程中,通过转动连接件二实现了圆柱压杆向下移动至贴合在支座上端,从而对支座进行平衡校正。
附图说明
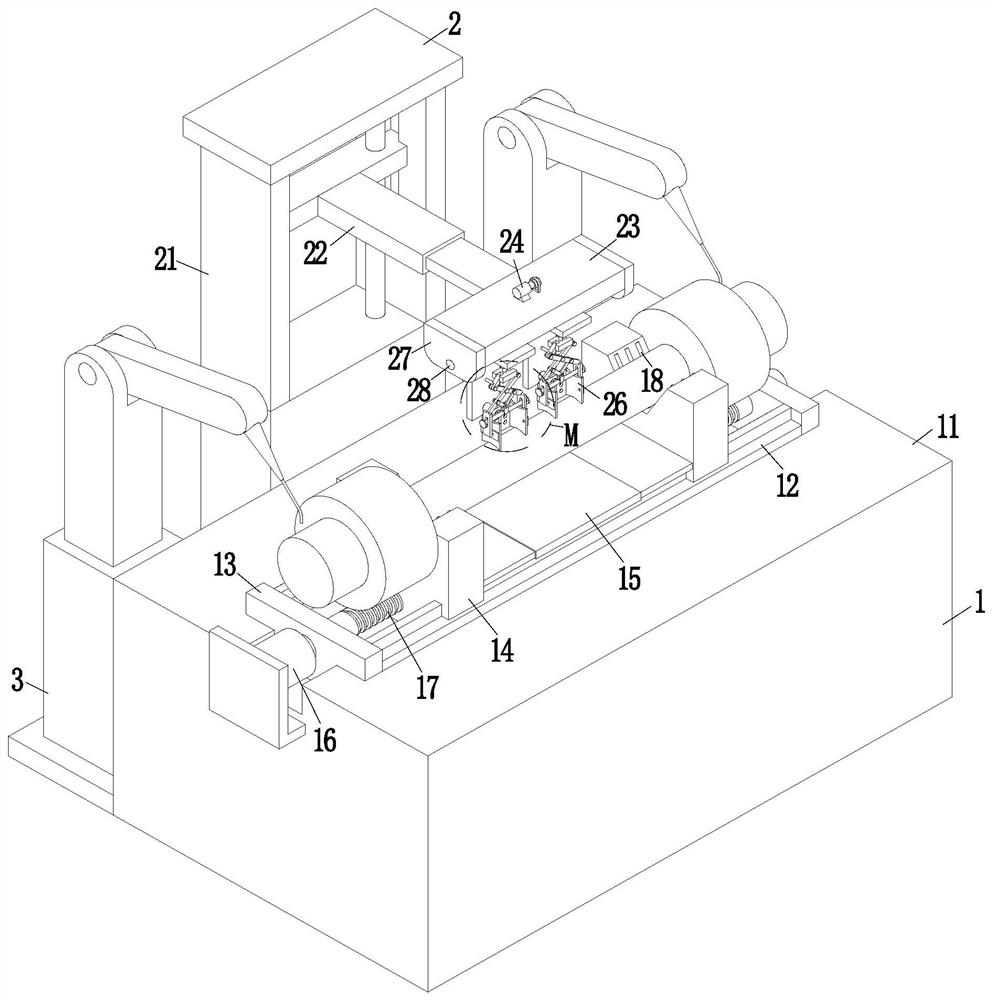
图1为本发明的立体结构示意图。
图2为本发明的图1中M处放大图。
图3为本发明的俯视平面结构示意图。
图4为本发明的左视平面结构示意图。
图5为本发明的主视平面结构示意图。
图6为本发明的图5中A-A处剖视图。
图7为本发明的图5中P处放大图。
图8为本发明的图5中N处放大图。
图9为本发明的图6中R处放大图。
图10为前轴与支座的焊接成品立体结构示意图。
图中:1、承接调整机构;11、固定工作台;12、滑移轨道;13、定位阻挡件二;14、配合滑移件;15、伸缩防护件;16、动力电机;17、双向螺纹杆二;18、转动圆柱;2、定位夹持机构;21、控制机体;22、伸缩定位件;23、方形定位件;24、动力输入件;241、微型电机;242、带轮;243、主动轮;244、传动带;245、从动轮;25、定位滑移件;26、校准夹持组件;261、倒L形定位件;262、电动伸缩杆;263、H形连接件;264、转动连接件一;265、平衡夹紧件;2651、夹持主件一;2652、夹持主件二;2653、定位杆件;2654、转动连接件二;2655、圆柱连接件;2656、承接固定件;2657、圆柱压杆;2658、平面夹紧件;266、定位夹紧件;2661、固定套筒;2662、定位圆环;2663、连接弹簧;2664、滑动块;2665、一字定位件;27、定位阻挡件一;28、双向螺纹杆一;3、焊接机器人。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参阅图1,一种前桥圆管定位焊接设备,包括承接调整机构1、定位夹持机构2与焊接机器人3,所述承接调整机构1后端固定连接有定位夹持机构2,定位夹持机构2上左右对称固定连接有焊接机器人3,其中:
参阅图1、图5与图6,所述定位夹持机构2包括控制机体21、伸缩定位件22、方形定位件23、动力输入件24、定位滑移件25、校准夹持组件26、定位阻挡件一27与双向螺纹杆一28,承接调整机构1后端固定连接有控制机体21,控制机体21上连接有伸缩定位件22,伸缩定位件22前端固定安装有方形定位件23,方形定位件23上端固定安装有动力输入件24,方形定位件23下端中部开设有齿轮安装槽,方形定位件23下端左右对称以滑动配合的方式连接有定位滑移件25,定位滑移件25下端固定连接有校准夹持组件26,方形定位件23左右两端均固定安装有定位阻挡件一27,定位阻挡件一27之间转动连接有双向螺纹杆一28,双向螺纹杆一28中部固定连接有动力输入件24,双向螺纹杆一28与定位滑移件25之间以螺纹配合的方式相连接;首先将前轴放置在承接调整机构1上进行居中调整,然后将两个支座挂置在校准夹持组件26上,通过校准夹持组件26对支座进行平衡夹紧,通过动力输入件24输出的转动力带动双向螺纹杆一28进行转动,双向螺纹杆一28转动使得定位滑移件25按设定距离值进行移动调整,两个支座间的距离固定后再由伸缩定位件22进行伸缩调整并下移,使得支座能够稳定贴合在前轴端面,这时两个焊接机器人3按设定值进行位置、角度调整,来将两个支座焊接固定在前轴上。
参阅图1、图4、图5与图8,所述动力输入件24包括微型电机241、带轮242、主动轮243、传动带244与从动轮245,方形定位件23上端通过电机座二固定安装有微型电机241,微型电机241输出轴右端固定安装有带轮242,齿轮安装槽内转动连接有主动轮243,带轮242与主动轮243之间通过传动带244相连接,主动轮243与从动轮245相啮合,从动轮245固定连接在双向螺纹杆一28上;通过微型电机241转动同步带动带轮242转动,再经传动带244通过主动轮243带动从动轮245转动,最终实现双向螺纹杆一28的转动。
参阅图1与图2,所述校准夹持组件26包括倒L形定位件261、电动伸缩杆262、H形连接件263、转动连接件一264、平衡夹紧件265与定位夹紧件266,定位滑移件25下端固定连接有倒L形定位件261,倒L形定位件261的水平平面下端固定连接有电动伸缩杆262,电动伸缩杆262下端固定安装有H形连接件263,H形连接件263上左右对称转动连接有转动连接件一264,转动连接件一264共同转动连接有平衡夹紧件265,倒L形定位件261的竖直平面前端固定安装有定位夹紧件266;工人先将支座通过定位夹紧件266进行挂接固定,之后电动伸缩杆262带动H形连接件263向上移动,再通过转动连接件一264使得平衡夹紧件265对支座进行夹持与校准,定位夹紧件266与平衡夹紧件265的配合使得定位滑移件25与伸缩定位件22在进行移动调整时,支座不会发生偏移与掉落,最终能够稳定贴合在前轴表面进行焊接。
参阅图6与图9,所述定位夹紧件266包括固定套筒2661、定位圆环2662、连接弹簧2663、滑动块2664与一字定位件2665,倒L形定位件261的竖直平面前端固定安装有固定套筒2661,固定套筒2661前端外壁固定连接有定位圆环2662,固定套筒2661内部前端固定连接有连接弹簧2663,连接弹簧2663前端固定连接有滑动块2664,滑动块2664与固定套筒2661之间以滑动配合的方式相连接,滑动块2664前端转动连接有一字定位件2665;首先向前拉动一字定位件2665从而使得滑动块2664向外伸出一截,此时利用支座中间的孔将支座挂接于滑动块2664上,再转动一字定位件2665于水平状态防止支座脱落,通过连接弹簧2663将滑动块2664向内拉使得支座被夹在定位圆环2662与一字定位件2665之间。
参阅图2、图5与图7,所述平衡夹紧件265包括夹持主件一2651、夹持主件二2652、定位杆件2653、转动连接件二2654、圆柱连接件2655、承接固定件2656与圆柱压杆2657,左侧转动连接件一264下端转动连接有夹持主件一2651,右侧转动连接件一264下端转动连接有夹持主件二2652,夹持主件一2651与夹持主件二2652上均开设有限行通孔,夹持主件一2651与夹持主件二2652通过定位杆件2653相铰接,定位杆件2653后端与倒L形定位件261固定连接,夹持主件一2651与夹持主件二2652上均转动连接有转动连接件二2654,两个转动连接件二2654通过圆柱连接件2655相铰接,圆柱连接件2655两端共同固定连接有承接固定件2656,承接固定件2656上固定连接有圆柱压杆2657,圆柱压杆2657与限行通孔之间活动连接;通过夹持主件一2651与夹持主件二2652对支座的外端面进行固定夹紧,同时夹持主件一2651与夹持主件二2652相对靠近的过程中,通过转动连接件二2654带动圆柱压杆2657向下移动至贴合在支座上端,从而对支座进行平衡校正;开设的限位通孔是用来补偿圆柱压杆2657在竖直方向上的移动调整。
参阅图2,所述夹持主件一2651与夹持主件二2652的相对端面均固定连接有平面夹紧件2658;设置平面夹紧件2658使得夹持力度均匀施加在支座上,使得支座不容易脱落。
参阅图1、图3与图5,所述承接调整机构1包括固定工作台11、滑移轨道12、定位阻挡件二13、配合滑移件14、伸缩防护件15、动力电机16与双向螺纹杆二17,固定工作台11上端中部开设有方形凹槽,固定工作台11上端且位于方形凹槽前后两侧对称固定安装有滑移轨道12,滑移轨道12左右两端均固定安装有定位阻挡件二13,滑移轨道12上端左右对称以滑动配合的方式连接有配合滑移件14,配合滑移件14之间且位于滑移轨道12上侧固定连接有伸缩防护件15,固定工作台11左端通过电机座一固定安装有动力电机16,动力电机16输出轴右端穿过左侧的定位阻挡件一27固定连接有双向螺纹杆二17,双向螺纹杆二17与配合滑移件14之间以螺纹连接的方式相配合,双向螺纹杆二17与定位阻挡件二13之间以转动连接的方式相配合;工人将前轴放在两个配合滑移件14上,启动动力电机16,通过双向螺纹杆二17转动带动配合滑移件14向相反的方向移动,直到配合滑移件14远离伸缩防护件15的端面贴合在前轴突出端,此时前轴位置居中;设置的伸缩防护件15是为了防止焊接时有熔渣掉落到双向螺纹杆二17上,从而影响配合滑移件14进行移动调整定位。
参阅图3,所述配合滑移件14的承接端面上均匀转动连接有转动圆柱18;配合滑移件14在移动时通过转动圆柱18使得其与前轴之间能够进行滑动,以便于配合滑移件14对前轴进行居中调整。
具体工作时:工人先将前轴放置在配合滑移件14上,开启动力电机16,通过双向螺纹杆二17转动来使得配合滑移件14进行移动,以实现对前轴摆放位置的调整,然后再将支座通过定位夹紧件266进行挂接夹紧,通过电动伸缩杆262带动平衡夹紧件265对支座进行形态校准,再通过动力输出件驱动双向螺纹杆一28转动来实现两个支座件的距离定位,最后由伸缩定位件22调整好前后距离再向下移动使得支座与前轴端面贴合,此时启动焊接机器人3电源开关,焊接机器人3根据输入的设定值进行位置调整,最终将支座固定焊接在前轴端面;若接下来进行同规格的前轴与支座焊接,则动力输入件24不必再运行,保持固定间距即可。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种圆管焊接设备
- 一种直线滑动的圆管打孔定位装置
- 一种圆管前桥成型后表面处理设备及其处理工艺
- 一种前桥圆管焊接机器人