以相同阶比来提供多个传动比的作业车辆多速驱动总成
文献发布时间:2023-06-19 18:32:25
技术领域
本公开涉及作业车辆(work vehicle)驱动系统,该作业车辆驱动系统包括以任一时钟方向实现多速旋转输出(multi-speed rotational output)的驱动总成(driveassembly),其中,在实现不同旋转输出的各个传动比(gear ratio)之间提供相同的阶比(step ratio)。
背景技术
诸如在农业、建筑业以及林业中使用的那些作业车辆以及其它常规车辆可以由内燃机(例如,柴油机)和/或一个或更多个电源(例如,电动机)来提供动力。在车辆中可以采用各种驱动装置来实现从主要或辅助动力源的动力传递。例如,车辆动力传动系(powerand drive line)可以包括一个或更多个驱动总成以实现用于运行某些车辆组件的一个或更多个输出速度。例如,轮端驱动装置(wheel end drive)、最终驱动装置(final drive)等可以提供一个或更多个传动比(gear ratio),以将终端或接近终端的动力传递至车辆的牵引地面接合轮或履带(track)。通过这种驱动装置所需的速度和转矩范围来实现高效和平稳的运行是理想的。
发明内容
本公开提供了一种多速驱动总成,诸如可以被用于作业车辆中(例如,作为牵引轮驱动装置)。
在一个方面,本公开提供了一种作业车辆的驱动总成,该驱动总成包括:壳体装置(housing arrangement),该壳体装置具有形成反作用构件的至少一个壳体部件;驱动轴,该驱动轴能够沿第一时钟方向和选择性地沿第二时钟方向,相对于反作用构件绕驱动轴线旋转;以及行星齿轮组,该行星齿轮组联接至驱动轴并且该行星齿轮组被配置成,选择性地沿第一时钟方向和选择性地沿第二时钟方向旋转输出部件。该行星齿轮组是两级行星齿轮组,该两级行星齿轮组具有第一级太阳齿轮、第一级齿轮架(carrier)、被支承在第一级齿轮架上的一组第一级行星齿轮、第一级齿圈(ring gear)、被抗旋转地固定至第一级齿轮架的第二级太阳齿轮、被抗旋转地固定至第一级齿圈的第二级齿轮架、被支承在第二级齿轮架上的一组第二级行星齿轮、以及第二级齿圈,其中,该输出部件与第二级齿轮架一起旋转。该驱动总成还包括:第一离合器装置,该第一离合器装置被配置成,选择性地接合行星齿轮组,以实现输出部件的第一传动比以及第一输出转速和转矩;以及第二离合器装置,该第二离合器装置被配置成,选择性地接合行星齿轮组,以实现输出部件的第二传动比以及第二输出转速和转矩,其中,从第一传动比到第二传动比的阶比为3:1。该驱动总成还包括:至少一个第一致动器,所述至少一个第一致动器被配置成,实现第一离合器装置沿着驱动轴线的移动,以选择性地接合行星齿轮组;以及至少一个第二致动器,所述至少一个第二致动器被配置成,实现第二离合器装置沿着驱动轴线的移动,以选择性地接合行星齿轮组。该驱动轴和输出部件在第一离合器装置与行星齿轮组接合的情况下沿相同的时钟方向旋转,并且该驱动轴和输出部件在第二离合器装置与行星齿轮组接合的情况下沿相反的时钟方向旋转。
在另一方面,本公开提供了一种作业车辆的驱动总成,该驱动总成包括:壳体装置,该壳体装置具有形成固定反作用构件的第一壳体部件、第二壳体部件、第一毂(hub)以及第二毂;驱动轴,该驱动轴能够沿第一时钟方向和选择性地沿第二时钟方向,相对于固定反作用构件绕驱动轴线旋转;以及联接至驱动轴的行星齿轮组。该行星齿轮组包括:第一级太阳齿轮、第一级齿轮架、被支承在第一级齿轮架上的一组第一级行星齿轮、第一级齿圈、被抗旋转地固定至第一级齿轮架的第二级太阳齿轮、被抗旋转地固定至第一级齿圈的第二级齿轮架、被支承在第二级齿轮架上的一组第二级行星齿轮、以及第二级齿圈。该驱动总成还包括:输出部件,该输出部件能够沿第一时钟方向和选择性地沿第二时钟方向与第二级齿轮架一起旋转,以输出转速和转矩;低速离合器装置(low clutch arrangement),该低速离合器装置联接至第一毂,并且该低速离合器装置被配置成,选择性地接合第二级齿圈,以实现这样的低速模式(low mode),即,在该低速模式下,行星齿轮组提供低速传动比(lowgear ratio)、驱动轴沿第二时钟方向旋转、以及输出部件沿第二时钟方向旋转;中速离合器装置(mid clutch arrangement),该中速离合器装置联接至第二毂,并且该中速离合器装置被配置成,选择性地接合第一级齿轮架,以实现这样的中速模式(mid mode),即,在该中速模式下,行星齿轮组以针对低速传动比的3:1阶比提供中速传动比(mid gear ratio)、驱动轴沿第一时钟方向旋转、以及输出部件沿第二时钟方向旋转;以及高速离合器装置(high clutch arrangement),该高速离合器装置联接至驱动轴,并且该高速离合器装置被配置成,选择性地接合第一级齿轮架,以实现这样的高速模式(high mode),即,在该高速模式下,行星齿轮组以针对中速传动比的3:1阶比提供高速传动比(high gear ratio)、驱动轴沿第二时钟方向旋转、以及输出部件沿第二时钟方向旋转。
在附图和下面的描述中对一个或更多个实施方式的细节进行阐述。其它的特征和优点根据该描述、附图以及权利要求将变得显而易见。
附图说明
图1是可以采用所公开的驱动总成的呈轮式装载机形式的示例作业车辆的示意性侧视图;
图2A是用于图1的示例作业车辆的动力传动系(power and drive train)的某些组件的示意图;
图2B是可以在图1的示例作业车辆中并入的所公开的驱动总成的示例轮端驱动装置实现的示意图;
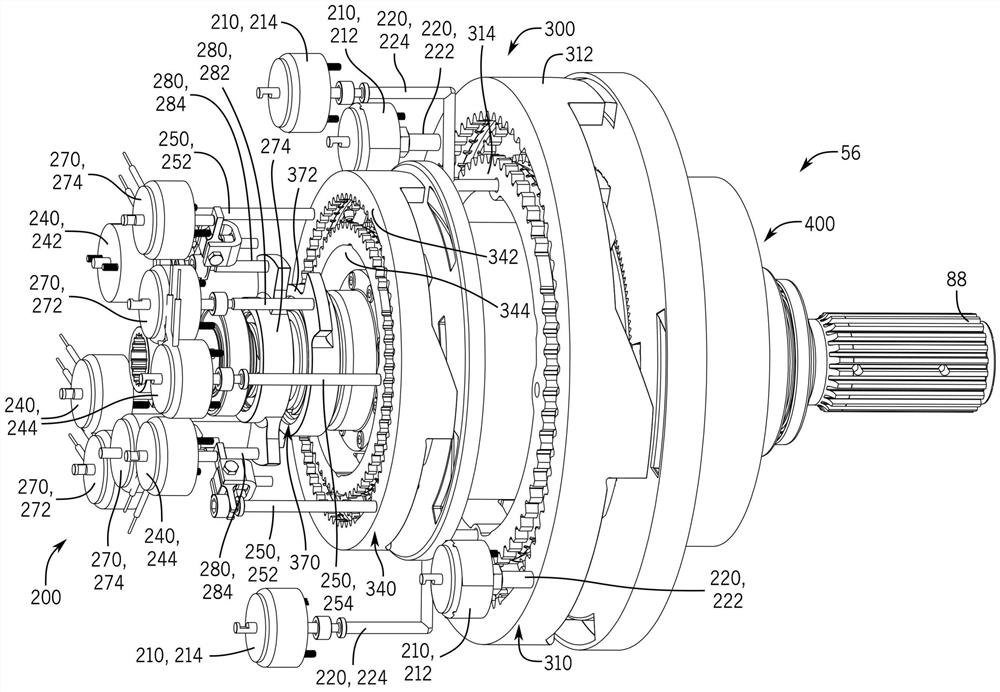
图3是可以在图1的作业车辆中实现的驱动总成的第一等距侧视图(isometricside view);
图4是可以在图1的作业车辆中实现的驱动总成的第二等距侧视图;
图5是图3和图4的驱动总成的其中省略了壳体部件的侧视图;
图6是图3和图4的驱动总成的端视图;
图7是图3和图4的驱动总成的齿轮组的分解图;
图8是图3和图4的驱动总成的并且贯穿图6的线8-8截取的截面图;
图9是图3和图4的驱动总成的第一离合器装置以及齿轮组的一部分的等距视图;
图10是图3和图4的驱动总成的第一离合器装置的局部分解等距视图;
图11是图3和图4的驱动总成的第一离合器装置以及齿轮组的一部分的分解等距视图;
图12是图3和图4的驱动总成的第二离合器装置以及齿轮组的一部分的等距视图;
图13是图3和图4的驱动总成的第二离合器装置的局部分解等距视图;
图14是图3和图4的驱动总成的第二离合器装置以及齿轮组的一部分的分解等距视图;
图15是图3和图4的驱动总成的第三离合器装置以及齿轮组的一部分的第一等距视图;
图16是图3和图4的驱动总成的第三离合器装置的局部分解等距视图;
图17是图3和图4的驱动总成的第三离合器装置以及齿轮组的一部分的分解等距视图;
图18是图3和图4的驱动总成的第三离合器装置的第二等距视图;
图19是图3和图4的驱动总成的并且贯穿图6的线19-19截取的截面图,示出了第一离合器装置与齿轮组接合;
图20是图3和图4的驱动总成的并且贯穿图6的线20-20截取的截面图,示出了第二离合器装置与齿轮组接合;以及
图21是根据实施方式的图3和图4的驱动总成的并且贯穿图6的线21-21截取的截面图,示出了指示第三离合器部件移动以接合齿轮组的箭头。
各图中的相同标号指示相同要素。
具体实施方式
下面描述如在上面简要描述的附图中示出的、所公开的双向驱动总成的一个或更多个示例实施方式。本领域技术人员可以设想针对示例实施方式的各种修改例。
如本文所使用的,除非另外限制或修改,否则具有由连接词术语(例如,“和”)分开并且之前还有短语“…中的一个或更多个”或者“…中的至少一个”的要素的列表指示潜在地包括列表的单独要素或其任何组合的配置或布置。例如,“A、B以及C中的至少一个”或者“A、B以及C中的一个或更多个”指示仅A、仅B、仅C、或者A、B以及C中的两个或更多个的任何组合(例如,A和B;B和C;A和C;或A、B以及C)的可能性。
如本文所使用的,术语“轴向(axial)”是指总体上平行于一个或更多个组件的旋转轴线、对称轴线或中心线的维度。例如,在具有中心线和相对的大体圆形两端或面的圆柱体或圆盘中,“轴向”维度可以指大体平行于相对两端或面之间的中心线延伸的维度。在某些情况下,术语“轴向”可以针对不是圆柱形(或者不是以其它方式径向对称)的组件使用。例如,包含旋转轴的矩形壳体的“轴向”维度可以被视为与轴的旋转轴线大体平行的维度。而且,本文所使用的术语“径向地(radially)”可以指组件相对于从共用中心线、轴线或类似参考起向外延伸的线的维度或关系,例如,在垂直于中心线或轴线的圆柱体或圆盘的平面中。在某些情况下,即使组件中的一个或两个组件可能不是圆柱形(或者不是以其它方式径向对称),也可以将这些组件视为“径向地”对准。此外,术语“轴向”和“径向”(以及任何派生词)可以涵盖不同于与真实轴向维度和径向维度精确对准(例如,倾斜于真实轴向维度和径向维度)的方向关系,只要该关系在相应标称轴向维度或径向维度中占优即可。另外,术语“周向”可以指绕轴线的垂直于径向维度和轴向维度的总切向维度。
概述
总体上,本公开提供了一种驱动总成,该驱动总成在该驱动总成的输入侧和输出侧可选择性地或者选择性地沿任一旋转时钟方向运行。在不改变内部或外部组件的情况下,该驱动总成可以接收旋转输入动力,并且根据需要,使用针对动力源(例如,电机)的用于控制输出旋转方向的驱动信号,沿任一时钟方向传输旋转输出动力。因此,可以将具有共同的内部和外部硬件的多个这种驱动总成用于以相反方式面对的轴,这些轴需要沿相反的时钟方向旋转以共同地实现车辆或其子系统的一个运动,以便沿相反的时钟方向向处于车辆的相反两侧处的地面接合车轮或履带提供牵引力,从而共同地沿正向或反向行进方向推进车辆。在一个示例实现中,可以在车辆的所有车轮的轮端驱动装置单元的通用配置中采用该双向驱动总成。
在某些实施方式中,驱动总成是或者包括具有齿轮组的动力传动总成,该齿轮组是由动力源驱动的,诸如一个或更多个电机或液压马达。齿轮组将旋转动力从动力源传至旋转输出构件。输出构件可以是中间组件或直接连接至从动组件。齿轮组可以实现输入动力源与输出构件之间的比率变化(change in ratio)、直接传输动力而不改变比率,或其组合。因此,输出构件可以以与输入动力源或输入轴相同的速度或者以与输入动力源或输入轴不同的一个或更多个速度旋转。齿轮组可以采取各种形式中的任一形式,包括:具有啮合正齿轮(spur)或其它齿轮的装置以及具有一个或更多个行星齿轮组的装置。大的齿轮减速比可以通过该驱动总成来实现,使得可以使用单个电机或液压马达并且以适合于一个或更多个速度和转矩输出的速度来运行。然而,多个电机或液压马达可以为驱动总成提供动力。
此外,在某些实施方式中,驱动总成可以自动地和/或选择性地切换(shift)传动比(即,在具有不同传动比的动力流路径之间切换)。该驱动总成可以包括一个或更多个主动接合组件,这些主动接合组件接合或脱离以实现通过动力流路径的动力传输。以这种方式,可以采用离合器配置以利用恰当的控制硬件和逻辑来执行传动比变化。在各种实施方式中,离合器装置可以具有一个或更多个正联锁换挡型离合器,可能被称为“爪式(dog)”离合器,其中,这些离合器的凸起特征(例如,轴向延伸的突出部)接合和脱离对应凸起特征,或者移入和移出齿轮组的配对组件中的对应凹部。在凸/凹配对特征的情况下,可以存在反转的关系(例如,离合器限定凹部来接纳齿轮组的凸起的突出部)。而且,一个或更多个离合器可以用于接合和脱离行星齿轮组的两个或更多个组件的联锁特征,使得一个或更多个离合器组件本身不具有联锁特征。
在某些实施方式中,该驱动总成可以包括离合器装置(clutch arrangement),该离合器装置具有选择性地与固定反作用构件或驱动总成(例如,相对于该驱动总成的驱动壳体固定的组件或者该驱动壳体的一部分)对接(interface)的多个离合器(或离合器环(clutch ring))。具有行星齿轮组的离合器装置的选择性接合和脱离使该离合器装置的一个或更多个组件接地(ground),以实现一个或更多个传动比以及对应的输出转速和转矩。可以将离合器装置永久地联接至反作用构件,使得可以将致动组件固定地安装至驱动总成,而无需致动移动齿轮组组件以及对应服务管线(例如,液压通道或管线)。致动组件也可以相对于反作用构件固定安装,以进一步减少或消除对非固定组件的服务管线。多个离合器部件通过致动组件的选择性接合由此允许驱动总成输出多个输出速度和转矩。
在一个示例中,离合器装置包括被选择性地致动以接合行星齿轮组的第一离合器装置、第二离合器装置、以及第三离合器装置。第一离合器装置的接合使行星齿轮组的组件接地以实现第一传动比并输出转速和转矩。第二离合器装置的接合使行星齿轮组的另一组件接地以实现第二传动比并输出转速和转矩。第三离合器装置的接合将行星齿轮组的组件抗旋转地固定(rotationally fixed to)至驱动轴,以实现第三传动比并输出转速和转矩。这样的多速驱动总成因此可以通过选择性地将行星齿轮组的不同组件接地或固定来实现三种速度。
在一个或更多个另一示例中,该行星齿轮组可以是复合行星齿轮组,该复合行星齿轮组包括两级,该两级具有:联接至驱动轴的第一级太阳齿轮、第一级齿轮架、被支承在第一级齿轮架上的一组第一级行星齿轮、第一级齿圈、联接至第一级齿轮架的第二级太阳齿轮、联接至第一级齿圈的第二级齿轮架、被支承在第二级齿轮架上的一组第二级行星齿轮、以及第二级齿圈。将第二级齿轮架联接至输出部件,使得该输出部件与第二级齿轮架一起旋转,以输出不同的转速和转矩。第一离合器装置选择性地接合第二级齿圈,以使第二级齿圈接地并且实现第一传动比,从而输出第一转速和转矩。第二离合器装置选择性地接合第一级齿轮架,以使第一级齿轮架接地并且实现第二传动比,从而输出第二转速和转矩。第三离合器装置选择性地接合第一级齿轮架,以将第一级齿轮架抗旋转地固定至驱动轴,该驱动轴进而抗旋转地固定行星齿轮组的组件并且实现第三传动比,从而输出第三转速和转矩。
在某些实施方式中,致动装置包括多个机电或电磁螺线管致动器(其将电能转换成机械线性推力和/或拉力),这些致动器起作用以接合和/或脱离离合器装置。在一个示例中,可以使用一个或更多个螺线管致动器来重新定位特定离合器装置的各个单独离合器环,使得使用至少两个螺线管致动器来重新定位离合器装置的成对的或分叉的离合器环。可以组合使用不同类型的致动器来重新定位离合器装置的一个或更多个离合器环。本公开涵盖各种实现。
如本文针对螺线管和其它类型的致动器所使用的,术语“启用(activated)”或“通电(energized)”是指:通过施加电磁力而导致关联的螺线管移动其衔铁(armature)的命令。在一个示例中,用于螺线管的通电命令导致相应衔铁被推出或拉入螺线管中,这可以由向螺线管内的线圈施加电流以将衔铁推出或拉入螺线管中而发生。还可以通过中断到线圈的电流来操作螺线管,使得弹簧相对于螺线管线圈推动/拉动衔铁。
根据一个示例,将本文的驱动总成配置为以三种模式运行,每种模式基于这些离合器装置的选择性致动来提供不同的传动比以便与齿轮组相互作用。因此,第一模式提供第一传动比,第二模式提供第二传动比,并且第三模式提供第三传动比。各个传动比挡位(shift)可以设置有3:1的阶比。例如,第一传动比可以是9:1,第二传动比可以是3:1并且第三传动比可以是1:1。另外,在第一模式中,输入旋转和输出旋转可以处于相同方向,即,第一时钟方向和第二时钟方向之一。在第二模式下,输入旋转的时钟方向被反转,使得输入旋转处于与输出旋转相反的时钟方向。在第三模式下,输入旋转的时钟方向再次被反转,使得输入旋转和输出旋转处于相同的时钟方向。以这种方式,可以提供平滑且一致的齿轮换挡。另外,输入旋转可以与各个传动比挡位交替时钟(旋转)方向,而输出旋转可以持续与各个传动比挡位处于同一时钟方向。这三种模式中的各种模式也可以以正向模式和反向模式操作,使得反向模式下的输出旋转与正向模式下的输出旋转方向相反。
本文所公开的驱动总成可以有用于任何数量的作业或常规车辆应用。在作业车辆背景下,驱动总成可以为车辆的包括动力传动系的各个方面的各种子系统提供动力。作为一个示例,驱动总成可以是或者可以被并入轮驱动中,以用于向车辆的地面接合轮或履带提供牵引动力。可以将驱动总成在轮/履带与原动机或传动装置之间的中间位置处并入动力传动系中,或者驱动总成可以处于轮/履带端部处(例如,在各个地面接合轮或履带处有一个驱动总成),在该情况下,驱动总成可以被认为是直接或者通过下游齿轮组联接至轮或履带运送轮毂的“最终驱动装置”。在这种情况下,当驱动总成远离原动机时,诸如一个或更多个电机或液压马达的辅助动力源向驱动总成提供即时动力输入。
下面描述了所公开的驱动总成的一个或更多个示例实现。本文的讨论有时可以集中于轮式装载机的轮端驱动装置总成的示例应用,但是所公开的驱动总成适于其它类型的组件和作业车辆,包括各种其它建筑机械(例如,履带牵引装置(crawler)、机动平地机、自卸车)以及各种农业或林业机械(例如,联合收割机、收割机、压捆机(baler)、割草机、传送装置(forwarder)、林业集材机等)和多用途车辆。
描述
参照图1和图2A,在一些实施方式中,所公开的作业车辆20可以是轮式装载机,但如所指出的,本文所描述的驱动总成可以应用于多种机器。如图所示,作业车辆20可以被认为包括支承作业机具24的结构主框架或底盘22,该作业机具24通过结构部件(例如,臂、横杆、枢转接头等)的各种组合而选择性地定位,并利用诸如液压缸这样的任何数量的致动器可控地移动。作业车辆20还可以被认为包括:操作员驾驶室26、动力传动系28、控制系统30以及液压系统32。作业车辆20可以由地面接合轮或履带支承离开地面。在例示示例中,作业车辆20包括:具有可转向前轮34(在作业车辆20的左横侧或右横侧各有一个可转向前轮)的前车轴(axle),以及具有不可转向后轮36(在作业车辆20的左侧或右侧各有一个或更多个不可转向后轮)的后车轴。
进一步参照图2A,动力传动系28具有车轮转向组件38,包括将手动转向输入(例如,操作员转向控件或车轮)和/或自动转向输入(经由控制系统30)联接至车轮(诸如可转向车轮34)的各种装置(例如,动力转向泵和管线、转向机构等)。动力传动系28包括原动机(诸如发动机40),其将动力提供给作业车辆20,作为直接机械动力或者在被转换成电力或液压动力之后提供给作业车辆。在一个示例中,发动机40是具有用于输出机械动力的发动机轴的内燃机,诸如柴油机。发动机40是由控制系统30的发动机控制模块(未示出)来控制的。应注意,内燃机的使用只是示例,这是因为主动力源可以是一个或更多个燃料电池、电动机、混合燃气电动机或者其它产生动力的装置。
发动机40向作业车辆20的车载机械、电气以及液压子系统提供动力,这些子系统管理诸如推进作业车辆20的牵引动力以及向远离作业车辆20的其它子系统提供非车载动力此类的事项。例如,发动机40可以提供被转换成电形式的机械动力以运转控制系统30的电子装置和作业车辆20的一个或更多个电驱动装置。控制系统30因此可以具有机械动力-电力转换组件44、一个或更多个电池46以及关联电子装置,包括各种交流发电机、发电机、电压调节器、整流器、逆变器等。可以将控制系统30配置为具有关联处理器装置和存储器架构的计算装置或电子控制单元(ECU),配置为硬布线计算电路(或多个电路),配置为可编程电路,配置为液压、电气或电动液压控制器。
可以将控制系统30配置成执行关于作业车辆20的各种计算和控制功能,包括与动力传动系28、液压系统32以及作业车辆20的各种附加组件相关联的各种装置。在一些实施方式中,可以将控制系统30配置成,接收采用各种格式的输入信号(举例来说,如液压信号、电压信号、电流信号等),并且输出采用各种格式的命令信号(举例来说,如液压信号、电压信号、电流信号、诸如旋转的机械移动等)。将控制系统30配置成,操作所公开的驱动总成的各个方面,包括机电致动器(例如,螺线管),其可以形成动力传动系28的一部分或者作业车辆20的另一子系统的一部分。
在一些实施方式中,控制系统30可以包括或者可以被配置成从人机界面或操作员界面(未示出)以及在作业车辆20上或远离作业车辆20的各种传感器、单元和系统接收输入命令,或者以其它方式与该人机界面或操作员界面以及在作业车辆20上或远离作业车辆20的各种传感器、单元和系统对接。作为响应,控制系统30可以生成用于由作业车辆20的各种系统实现的一种或更多种类型的命令。另外或者选择性地,控制系统30可以在没有来自人类操作员的输入的情况下自主地操作,以各种已知的方式与其它系统或装置(包括其它控制器)进行通信,包括经由CAN总线(未示出)、经由无线或液压通信装置或以其它方式。在一个示例中并且如下更详细地讨论的,控制系统30可以命令电流到与致动器总成相关联的电磁体以接合和/或脱离驱动总成内的离合器。
发动机40还可以提供被转换成液压形式的机械动力以向各种液压驱动装置、泵以及压缩机提供动力,这些液压驱动装置、泵以及压缩机对流体进行加压以驱动液压系统32的各种致动器,以便为作业车辆20的组件(诸如作业机具24、车轮转向和制动、牵引式作业机具(未示出)等)提供动力。在该示例中,作业车辆20支承作业机具24的安装,作为具有连杆动臂(linkage boom arm)和铲斗的装载机,该铲斗可以在操作期间通过一个或更多个液压活塞-缸装置升起和降下。液压系统32可以自主地或者响应于来自驾驶室26中或远离作业车辆20的操作员输入装置(例如,操作员控件、操作员显示装置等)的命令而联接至控制系统30,并由该控制系统进行操作。液压系统32可以包括其它组件(例如,阀、流管线、活塞/缸、密封件/垫圈等),使得可以利用液压、机械或其它信号和移动以及基于液压、机械或其它信号和移动,来实现对各种装置的控制。
如上所提到的,本公开的驱动总成可以在作业车辆背景内的各种子系统中实现,并且可以以一种或更多种形式来提供动力。下面描述了一个示例驱动总成,该示例驱动总成被实现为电动轮端驱动装置50以及被结合在该电动轮端驱动装置内。将一个这样的轮端驱动装置50正好安装在作业车辆20的四个车轮34、36中的各个车辆的上游。因此,各个轮端驱动装置50本身或者其一个或更多个组件可被认为是“最终”驱动装置,这是由于其位置邻近关联的车轮34、36并且其起作用,以为关联的车轮34、36提供最后或几乎最后的传动比。轮端驱动装置50可以在车轮34、36中的个车轮处或者在各对车轮(例如,前部和后部)处不同。然而,由于驱动总成的双向功能,因此,轮端驱动装置50对于所有车轮34、36都是相同的,因此下面仅详细说明一个轮端驱动装置。而且,虽然示例轮端驱动装置50是电动的,但是它可以通过不同的输入动力形式(例如,液压或机械的)来操作。示例轮端驱动装置50在本文中也被描述为具有用于输入动力的多个(例如,两个)电机。然而,轮端驱动装置50可以利用一个或多于两个的电机来操作。在前一情况下,根据电机和/或驱动总成本身以及车轮34、36的运行参数(例如,速度和转矩),可以利用或省略中间输入齿轮传动装置(gearing)。如将要描述的,当采用两个或更多个电机时,使用中间输入传动装置来将动力联接至驱动总成。另外,示例轮端驱动装置50是多模式驱动装置,其可操作成向车轮34、36输出牵引动力的多个速度和转矩范围。因此,当发动机40为电机提供原动力时,轮端驱动装置50是车轮34、36的直接动力(以及速度和转矩)影响者,使得中央范围传动装置、车轴或者其它上游速度和转矩改变齿轮传动装置可以并且在示例实现中从作业车辆20中省略。
还参照图2B,示例轮端驱动装置50包括:采用两个电机52的形式的输入动力源作为主要组件,该电机52经由输入齿轮组54联接至驱动总成56,该驱动总成56又经由外侧轮端58联接至车轮34、36中的一个车轮并驱动该车轮。外侧轮端58可以以适于安装关联车轮34、36的任何方式来进行配置。根据轮端驱动装置50的速度和转矩要求,外侧轮端58可以包含诸如单级行星齿轮组60这样的外侧齿轮组,该单级行星齿轮组具有太阳齿轮62,以及支承与齿圈68啮合的行星齿轮66的齿轮架64。可以将齿轮架64直接固定至关联车轮34、36的轮毂(未示出),或者可以将齿轮架64包含在联接至轮毂的外侧轮端壳体70内。可以将齿圈68固定至安装法兰72或者与该安装法兰一体地形成。示例外侧齿轮组60是太阳轮输入(sun-in)、齿轮架输出(carrier out)式行星装置,但是可以想到各种其它配置,包括省略由车轮34、36的轮毂形成或者直接联接至车轮34、36的轮毂的外侧齿轮组或齿轮架和/或外侧轮端壳体70。轮端驱动装置50对于后轮36的情况下来说,是诸如通过安装法兰72以固定取向组装至车辆底盘22的,或者对于转向前轮34的情况来说,是绕竖立的、大体竖直的或者竖直倾斜的转向轴线(未示出)枢转地组装至车辆底盘22的。一个或更多个车轮轴承74允许齿轮架64和/或外侧轮端壳体70相对于车辆底盘22,绕大体横向、或侧向固定的或枢转的驱动或旋转轴线旋转。外侧轮端58在从驱动总成56经由输出轴76输出的动力下绕旋转轴线旋转,该输出轴联接至外侧行星齿轮组60的太阳齿轮62或者与该外侧行星齿轮组的太阳齿轮一体地形成。驱动总成56是通过用花键联接至中心输入齿轮82的输入轴80来提供动力的,该中心输入齿轮82与由电机52旋转的相对小直径的轴齿轮84啮合。如上提到,轮端驱动装置50的输入侧可以以各种方式来实现,包括:利用不同的输入齿轮组(例如,不同的轴向齿轮组或者单级或双级行星齿轮组)、通过具有或不具有输入齿轮组的单个电机(例如,电机到驱动总成的直接轴安装)、通过具有任何合适的轴向、行星或其它齿轮配置的经改变的输入齿轮组的多于两个的电机、以及通过不同形式的动力源(例如,机械的或液压的)。可以根据需要将轮端驱动装置50的输入侧以及外侧轮端58配置成,至少部分地根据在车轮34、36处的所希望的速度和转矩以及电机52的速度和最大转矩(torque capacity),而在电机52与驱动总成56之间以及在驱动总成56与轮毂之间根据需要提供1:1或其它传动比。
本实施方式的驱动总成56总体上包括:致动器、离合器装置以及壳体内的齿轮组。驱动总成56操作以在多个传动比下将动力(转速和转矩)从电机52传递至各个车轮34、36处的外侧轮端58,这些传动比是基于离合器装置的状态来选择的,这些离合器装置是由致动器基于来自控制系统30的信号来控制的。在该示例中,驱动总成56通常沿着旋转轴线将来自联接至电机52的输入部件86的动力传递至联接至外侧轮端58的输出部件88。
现在,参照图3至图18,下面详细说明轮端驱动装置50的示例驱动总成56。示例驱动总成56是三速驱动装置,该三速驱动装置包括:沿各个时钟方向的直接或高速驱动(highdrive)模式,其中,实现1:1传动比,通过该1:1传动比来匹配输入速度和转矩与输出速度和转矩;以及沿各个时钟方向的两种其它模式,其中,实现传动比以实现相对于输入动力的不同输出速度和转矩。示例驱动总成56实现低速模式、中速模式以及高速模式。在各个时钟方向上,高速模式是直接驱动模式,并且具有比中速模式更高的速度和更低的转矩,而该中速模式具有比低速模式更高的速度和更低的转矩。
参照图3和图4,驱动总成56总体上包括壳体装置100,该壳体装置100由多个壳体部件形成,这些壳体部件例如包括第一壳体部件102和第二壳体部件104。壳体装置100还包括第一毂106,该第一毂106被至少部分地设置在第一壳体部件102与第二壳体部件104之间,并且也可以被认为是壳体部件。将壳体部件102、104配置成,容纳一个或更多个离合器装置、一个或更多个致动器和/或齿轮组的一部分。另外,驱动轴90(例如,参见图8)在壳体装置100内延伸并且被配置成,相对于壳体部件102、104中的至少一个壳体部件绕驱动轴线92旋转。
至少一个壳体部件102、104形成反作用构件。在一个示例中,第一壳体部件102形成反作用构件,并因此,相对于旋转轴线(即,驱动轴线92)在轴向上且在径向上被固定,使得至少在后非转向轮(rear non-steered wheel)的情况下,第一壳体部件102相对于作业车辆底盘22固定。因此,第一壳体部件102以及某些其它固定组件可以用作这样的反作用构件,即,抵着该反作用构件施加由驱动总成56的非固定组件实现的某些力。在示例驱动总成56中,第一壳体部件102形成这样的反作用构件,即,抵着该反作用构件直接地或间接地施加来自离合器装置的反作用力。因此,第一壳体部件102本身被认为是如本文所使用的“反作用构件”,其用于所施加的力的直接和间接托架(backstop)。此外,第二壳体部件104和第一毂106是固定壳体部件,并且也可以被认为是反作用构件或者反作用构件的部分。
参照图4至图6,驱动总成56设置有致动总成(actuation assembly)200,该致动总成200被配置成,通过在壳体装置100内重新定位一个或更多个离合器装置以选择性地与齿轮组相互作用来修改通过驱动总成56的动力流。
例如,图5的视图描绘了驱动总成56,其中壳体部件102、104中的一个或更多个壳体部件被移除以示出致动总成200、离合器装置300以及齿轮组400。致动总成200包括至少一个第一致动器210以及至少一个第二致动器240。可以将所述至少一个第一致动器210支承在第一毂106上(从图5中省略),并且可以将所述至少一个第二致动器240支承在致动器框架202上(例如,参见图4)。将致动器框架202固定至壳体装置100。例如,致动器框架202可以被固定至第一壳体部件102,并且也可以被认为是固定反作用构件。
离合器装置300总体上包括一个或更多个离合器装置,诸如第一离合器装置310和第二离合器装置340。将所述至少一个第一致动器210经由至少一个第一连杆220联接至第一离合器装置310。类似地,将所述至少一个第二致动器240经由至少一个第二连杆250联接至第二离合器装置340。
在一个示例中,所述至少一个第一致动器210是至少一个低速致动器,第一离合器装置310是低速离合器装置,并且所述至少一个第一连杆220是至少一个低速连杆。在一个示例中,所述至少一个低速致动器210包括第一低速致动器212和第二低速致动器214,并且所述至少一个低速连杆220包括第一低速连杆222和第二低速连杆224。将第一低速连杆222互连在第一低速致动器212与低速离合器装置310之间,并且将第二低速连杆224互连在第二低速致动器214与低速离合器装置310之间。第一低速致动器212和对应连杆222,以及第二低速致动器214和对应连杆224可以各自成对地设置。
低速离合器装置310包括第一低速离合器环312和第二低速离合器环314。将第一低速连杆222互连在第一低速致动器212与第一低速离合器环312之间,使得第一低速致动器212可以经由第一低速连杆222将致动力传输至第一低速离合器环312,以实现第一低速离合器环312沿至少一个方向(例如,第一轴向方向94和/或第二轴向方向96)的移动。类似地,将第二低速连杆224互连在第二低速致动器214与第二低速离合器环314之间,使得第二低速致动器214可以经由第二低速连杆224将致动力传输至第二低速离合器环314,以实现第二低速离合器环314沿至少一个方向(例如,第一轴向方向94和/或第二轴向方向96)的移动。
在一个示例中,所述至少一个第二致动器240是至少一个中速致动器(midactuator),第二离合器装置340是中速离合器装置,并且所述至少一个第二连杆250是至少一个中速连杆。在一个示例中,所述至少一个中速致动器240包括第一中速致动器242和第二中速致动器244,并且所述至少一个中速连杆250包括第一中速连杆252和第二中速连杆254。将第一中速连杆252互连在第一中速致动器242与中速离合器装置340之间,并且将第二中速连杆254互连在第二中速致动器244与中速离合器装置340之间。第一中速致动器242和对应连杆252,以及第二中速致动器244和对应连杆254可以各自成对地设置。
中速离合器装置340包括第一中速离合器环342和第二中速离合器环344。将第一中速连杆252互连在第一中速致动器242与第一中速离合器环342之间,使得第一中速致动器242可以经由第一中速连杆252将致动力传输至第一中速离合器环342,以实现第一中速离合器环342沿至少一个方向(例如,第一轴向方向94和/或第二轴向方向96)的移动。类似地,将第二中速连杆254互连在第二中速致动器244与第二中速离合器环344之间,使得第二中速致动器244可以经由第二中速连杆254将致动力传输至第二中速离合器环344,以实现第二中速离合器环344沿至少一个方向(例如,第一轴向方向94和/或第二轴向方向96)的移动。
各个连杆222、224、252、254由轴向连杆部分(销)并且可选地由径向连杆部分(或臂)形成。例如,可以将轴向连杆部分直接联接至对应致动器和对应离合器环。在这种示例中,使致动器操作以实现轴向连杆部分的轴向移动,从而实现对应离合器环沿着驱动轴线92的移动。在其它示例中,可以将径向连杆部分联接至致动器,并且可以将轴向连杆部分联接至径向连杆部分和对应离合器环。在这样的示例中,使致动器操作以实现径向连杆部分的枢转移动,这进而实现轴向连杆部分的轴向移动,从而实现对应离合器环沿着驱动轴线92的移动。
通常,致动器212、214、242、244是机电螺线管装置,它们通过操纵螺线管装置内的感应磁场而在相应衔铁处产生线性移动,并且进而产生致动力。在一个示例中,当螺线管装置被启用或接合时,衔铁移出螺线管装置,但是被启用或接合的螺线管装置也可以将衔铁移入螺线管装置中。此外,在该示例中,可以将致动器212、214、242、244沿不同方向定向,使得可以将单一类型的螺线管装置(例如,推动式螺线管装置或拉动式螺线管装置)用在不同位置以在驱动总成56内产生希望的移动。如本文所使用的,术语“活动的”或“接合的”致动器是指致动器的以下移动:该移动导致相应离合器部分的接合位置(例如,与相应致动器是否在推动、拉动和/或使得弹簧力或其它力能够接合离合器部件无关)。尽管未示出,但是致动器212、214、242、244包括至少一个连接部件,所述至少一个连接部件使得能够实现关于控制系统30(图2A)和/或其它源的有线或无线命令和/或动力。可以提供其它类型和布置的致动器和连杆。
进一步参照图5和图6,致动总成200还可以包括至少一个第三致动器270。可以将所述至少一个第三致动器270安装在致动器框架202。另外,离合器装置300还可以包括第三离合器装置370。将所述至少一个第三致动器270通过至少一个第三连杆280联接至第三离合器装置370。类似于所述至少一个第一致动器210和所述至少一个第二致动器240,所述至少一个第三致动器270也可以是机电螺线管装置,它通过操纵螺线管装置内的感应磁场而在相应衔铁处产生线性移动,并且进而产生致动力。
在一个示例中,所述至少一个第三致动器270是高速致动器,第三离合器装置370是高速离合器装置,并且所述至少一个第三连杆280是至少一个高速连杆。在一个示例中,所述至少一个高速致动器270包括第一高速致动器272和第二高速致动器274,并且所述至少一个高速连杆280包括第一高速连杆282和第二高速连杆284。将第一高速连杆282互连在第一高速致动器272与高速离合器装置370之间,并且将第二高速连杆284互连在第二高速致动器274与高速离合器装置370之间。第一高速致动器272和对应连杆282,以及第二高速致动器274和对应连杆284可以各自成对地设置。
高速离合器装置370包括第一高速离合器环372和第二高速离合器环374。将第一高速连杆282互连在第一高速致动器272与第一高速离合器环372之间,使得第一高速致动器272可以经由第一高速连杆282将致动力传输至第一高速离合器环372,以实现第一高速离合器环372沿至少一个方向(例如,第一轴向方向94和/或第二轴向方向96)的移动。类似地,将第二高速连杆284互连在第二高速致动器274与第二高速离合器环374之间,使得第二高速致动器274可以经由第二高速连杆284将致动力传输至第二高速离合器环374,以实现第二高速离合器环374沿至少一个方向(例如,第一轴向方向94和/或第二轴向方向96)的移动。
高速连杆282、284可以以与上述低速连杆222、224以及中速连杆252、254相同的方式来形成和操作。例如,高速连杆282、284可以由轴向连杆部分(销)并且可选地由径向连杆部分(臂)形成。在一个示例中,可以使高速致动器272、274中的一个或更多个高速致动器操作,以实现轴向连杆部分的轴向移动,从而实现对应高速离合器环372、374沿着驱动轴线92的移动。在其它示例中,可以使高速致动器272、274中的一个或更多个高速致动器操作以实现径向连杆部分的枢转移动,这进而实现轴向连杆部分的轴向移动,从而实现对应高速离合器环372、374沿着驱动轴线92的移动。
现在,参照图7的分解图和图8的截面图,驱动总成56还包括相对于离合器装置300定位的齿轮组400。将离合器装置300配置成,选择性地与齿轮组400的一个或更多个部分相互作用,以修改通过驱动总成56的动力流。以这种方式,可以基于离合器装置310、340、370的状态,来选择性地提供在预定传动比下输入部件86与输出部件88之间的转矩传递。
驱动轴90延伸穿过壳体装置100和齿轮组400的内部的至少一部分。驱动总成56的输入部件86与驱动轴90成一体或者以其它方式联接至驱动轴152,该驱动轴又联接成驱动齿轮组400。驱动总成56包括一个或更多个轴承部件154,该轴承部件被配置成,支承可旋转部件相对于固定部件的旋转,以及可旋转部件相对于其它可旋转部件的旋转(例如,在可旋转部件接地或者以不同速度旋转的情况下)。
在一个示例中,齿轮组400是具有第一级410和第二级430的行星齿轮组。行星齿轮组400包括:第一级太阳齿轮412、第一级行星齿轮414、第一级齿轮架416以及第一级齿圈418。将第一级太阳齿轮412配置为与驱动轴90一起旋转,并且包括外齿或花键以与第一级行星齿轮414啮合。在一个示例中,将第一级太阳齿轮412与驱动轴90一体地形成为单件。在这样的示例中,可以将第一级太阳齿轮412可选地设置为沿着驱动轴90的直径增大的节段。在其它示例中,可以将第一级太阳齿轮412与驱动轴90分离地形成,并且安装在驱动轴90上。可以将第一级太阳齿轮412抗旋转地固定至驱动轴90以与驱动轴90一起旋转。例如,可以将第一级太阳齿轮412通过第一级太阳齿轮412的内表面与驱动轴90的外表面之间的花键接合而抗旋转地固定至驱动轴90。
第一级行星齿轮414外接(circumscribe)第一级太阳齿轮412,并且在一个示例中,是以单个圆周排(circumferential row)设置的。然而,在其它示例中,可以将第一级行星齿轮414以径向堆叠的圆周排来设置,其中,在径向方向上具有奇数个行星齿轮(即,奇数排)。第一级行星齿轮414中的各个第一级行星齿轮包括齿或花键,以用于与第一级太阳齿轮412啮合,以适应第一级行星齿轮414与第一级太阳齿轮412之间的力的传输。
第一级齿轮架416外接驱动轴90,并且被配置为绕驱动轴线92选择性地旋转。第一级齿轮架416是至少部分地由第一个径向延伸的、轴向面对的第一级齿轮架板420和第二个径向延伸的、轴向面对的第一级齿轮架板422形成的。第一级齿轮架板420、422包括一排安装位置,这些安装位置用于接纳延伸穿过并支承对应第一级行星齿轮414的第一行星车轴(planet axle)424。在一个示例中,第一个第一级齿轮架板420和第二个第一级齿轮架板422是彼此沿轴向间隔开的,并且将第一级行星齿轮414至少部分地设置在第一个第一级齿轮架板420与第二个第一级齿轮架板422之间。另外,第一行星车轴424可以将第一个第一级齿轮架板420和第二个第一级齿轮架板422抗旋转地固定至彼此,使得齿轮架板420、422被配置成一起旋转和/或一起保持不旋转。因此,第一级齿轮架板420、422的共同移动或移动限制对应于第一级齿轮架416的移动或移动限制。
在第一级齿轮架416和第一级行星齿轮414的示例布置中,各个第一行星车轴424形成用于对应第一级行星齿轮414的单独的旋转轴线,这使得第一级行星齿轮414能够相对于第一级齿轮架416在第一行星车轴424的轴线上旋转或自旋(spin)。这种布置还使得第一级行星齿轮414能够与第一级齿轮架416一起绕驱动轴线92共同旋转。另外,第一行星车轴424使得能够在第一级行星齿轮414与第一级齿轮架416之间传输力。
第一级齿圈418外接第一级行星齿轮414并围绕驱动轴线92。第一级齿圈418包括被设置在径向内表面上的齿,该齿与第一级行星齿轮414的齿啮合,以适应第一级行星齿轮414与第一级齿圈418之间的力的传输。
在运行中,力可以在驱动轴90与第一级太阳齿轮412之间传输,例如,通过驱动轴90与第一级太阳齿轮412之间的单件构造或花键接合。另外,力可以通过第一级太阳齿轮412和第一级行星齿轮414上的对应齿的啮合接合,而在第一级太阳齿轮412与第一级行星齿轮414之间传输。此外,力可以通过第一级行星齿轮414和第一级齿圈418上的对应齿的啮合接合,而在第一级行星齿轮414与第一级齿圈418之间传输。更进一步地,力可以通过第一行星车轴424在第一级行星齿轮414与第一级齿轮架416之间传输。
齿轮组400还包括:第二级太阳齿轮432、第二级行星齿轮434、第二级齿轮架436以及第二级齿圈438。将第二级太阳齿轮432配置为绕驱动轴线92旋转,并且包括外齿或花键以与第二级行星齿轮434啮合。在一些示例中,将第二级太阳齿轮432与沿着驱动轴线92延伸的第二级轴440一体地形成为单件,并因此被配置成与第二级轴440一起旋转。选择性地,可以将第二级太阳齿轮432与第二级轴440分离地形成并且被安装在第二级轴440上,以与第二级轴440一起旋转。例如,可以将第二级太阳齿轮432通过第二级太阳齿轮432的内表面与第二级轴440的外表面之间的花键接合而抗旋转地固定至第二级轴440。按这种布置,第二级轴440和第二级太阳齿轮432可以根据离合器装置310、340、370的状态,与驱动轴90一起旋转或者独立于驱动轴90而旋转。
第二级行星齿轮434外接第二级太阳齿轮432,并且在一个示例中,是以单个圆周排设置的。然而,在其它示例中,可以将第二级行星齿轮434以径向堆叠的圆周排来设置,其中,在径向方向上具有奇数个行星齿轮(即,奇数排)。第二级行星齿轮434中的各个第二级行星齿轮包括齿或花键,以用于与第二级太阳齿轮432啮合,以适应第二级行星齿轮434与第二级太阳齿轮432之间的力的传输。
第二级齿轮架436外接第二级轴440,并且被配置为绕驱动轴线92选择性地旋转。第二级齿轮架436是至少部分地由第一个径向延伸的、轴向面对的第二级齿轮架板442和第二个径向延伸的、轴向面对的第二级齿轮架板444形成的。第二级齿轮架板442、444包括一排安装位置,这些安装位置用于接纳延伸穿过并支承对应第二级行星齿轮434的第二行星车轴446。在一个示例中,第一个第二级齿轮架板442和第二个第二级齿轮架板444是彼此沿轴向间隔开的,并且将第二级行星齿轮434至少部分地设置在第一个第二级齿轮架板442与第二个第二级齿轮架板444之间。另外,第二行星车轴446可以将第一个第二级齿轮架板442和第二个第二级齿轮架板444抗旋转地固定至彼此,使得齿轮架板442、444被配置成一起旋转和/或一起保持不旋转。因此,第二级齿轮架板442、444的共同移动或移动限制对应于第二级齿轮架436的移动或移动限制。
在第二级齿轮架436和第二级行星齿轮434的示例布置中,各个第二行星车轴446形成用于对应第二级行星齿轮434的单独的旋转轴线,这使得第二级行星齿轮434能够相对于第二级齿轮架436在第二行星车轴446的轴线上旋转或自旋。这种布置还使得第二级行星齿轮434能够与第二级齿轮架436一起绕驱动轴线92共同旋转。另外,第二行星车轴446使得能够在第二级行星齿轮434与第二级齿轮架436之间传输力。
第二级齿圈438外接第二级行星齿轮434并围绕驱动轴线92。第二级齿圈438包括被设置在径向内表面上的齿,该齿与第二级行星齿轮434的齿啮合,以适应第二级行星齿轮434与第二级齿圈438之间的力的传输。
在运行中,力可以在第二级轴440与第二级太阳齿轮432之间传输,例如,通过第二级轴440与第二级太阳齿轮432之间的单件构造或花键接合。另外,力可以通过第二级太阳齿轮432和第二级行星齿轮434上的对应齿的啮合接合,而在第二级太阳齿轮432与第二级行星齿轮434之间传输。此外,力可以通过第二级行星齿轮434和第二级齿圈438上的对应齿的啮合接合,而在第二级行星齿轮434与第二级齿圈438之间传输。更进一步地,力可以通过第二行星车轴446在第二级行星齿轮434与第二级齿轮架436之间传输。
将第二级齿轮架436抗旋转地固定至第一级齿圈418,使得第二级齿轮架436和第一级齿圈418一起旋转。在一个示例中,将齿轮架适配器450互连在第一级齿圈418与第二级齿轮架436之间,以将第一级齿圈418抗旋转地固定至第二级齿轮架436。可以将齿轮架适配器450连接至第一个第二级齿轮架板442。因此,第一级齿圈418、齿轮架适配器450、以及第二级齿轮架436可以作为一个单元选择性地旋转或者被保持不旋转。
另外,将第一级齿轮架416抗旋转地固定至第二级太阳齿轮432,使得第一级齿轮架416和第二级太阳齿轮432可以选择性地一起旋转或者要一起保持不旋转。在一个示例中,将第二个第一级齿轮架板422与第二级轴440一体地形成为一个件,或者抗旋转地固定至第二级轴440,该第二级轴是抗旋转地固定至第二级太阳齿轮432的。因此,第一级齿轮架416、第二级轴440、以及第二级太阳齿轮432可以作为一个单元旋转或者被保持不旋转。
第二级齿轮架436从齿轮组400输出转速和转矩。在一个示例中,将第二个第二级齿轮架板444与输出部件88一体地形成为一个件,或者抗旋转地固定至输出部件88。例如,第二个第二级齿轮架板444可以包括在驱动轴线92上延伸并且从壳体装置100向外伸出的轴向毂,该轴向毂充任输出部件88。
继续参照图8,并且另外参照图9至图11,将低速离合器装置310示出为相对于齿轮组400的一部分定位。在一个示例中,低速离合器装置310包括第一低速离合器环312和第二低速离合器环314。第一低速离合器环312和第二低速离合器环314是大体环形的,并且被定位成用于沿着第一毂106轴向移动。在一个示例中,第一低速离合器环312外接第一毂106并且由第一毂106接地,例如,通过花键接合。第二低速离合器环314由第一毂106外接并且由第一毂106接地,例如,通过花键接合。
第一低速离合器环312和第二低速离合器环314总体上被定位成邻近第二级齿圈438。第一低速离合器环312和第二低速离合器环314包括安装结构或短突出部(tab)316、318,使得第一低速离合器环312联接至第一低速连杆222,并且第二低速离合器环314联接至第二低速连杆224,以供对应低速致动器212、214进行致动。实际上,第一低速离合器环312和第二低速离合器环314可以被认为是分叉的离合器装置。
第一低速离合器环312包括一个或更多个第一低速离合器接合部件320,这些第一低速离合器接合部件被配置为与第二级齿圈438选择性地接合和脱离。在一个示例中,第一低速离合器接合部件320可以选择性地接合和脱离第二级齿圈438上的对应第一低速齿轮接合部件520。
第二低速离合器环314包括一个或更多个第二低速离合器接合部件322,这些第二低速离合器接合部件被配置为与第二级齿圈438选择性地接合和脱离。在一个示例中,第二低速离合器接合部件322可以选择性地接合和脱离第二级齿圈438的对应第二低速齿轮接合部件522。
因此,可以通过低速致动器212、214经由低速连杆222、224将低速离合器装置310选择性地重新定位到相对于第二级齿圈438的不同位置中。在一个示例中,将第一低速离合器环312配置成,使得第一低速致动器212起作用,以经由第一低速连杆222将第一低速离合器环312朝着第二级齿圈438重新定位至接合位置,在该接合位置中,第一低速离合器接合部件320与对应第一低速齿轮接合部件520接合。相反地,可以将第一低速离合器环312远离第二级齿圈438地重新定位至脱离位置,在该脱离位置中,第一低速离合器接合部件320脱离对应第一低速齿轮接合部件520。
类似地,将第二低速离合器环314配置成,使得第二低速致动器214起作用,以经由第二低速连杆224将第二低速离合器环314朝着第二级齿圈438重新定位至接合位置,在该接合位置中,第二低速离合器接合部件322与对应第二低速齿轮接合部件522接合。相反地,可以将第二低速离合器环314远离第二级齿圈438地重新定位至脱离位置,在该脱离位置中,第二低速离合器接合部件322脱离对应第二低速齿轮接合部件522。
当从脱离位置重新定位至接合位置以及从接合位置重新定位至脱离位置时,第一低速离合器环312和第二低速离合器环314是沿轴向移动的。在一个示例中,第一低速离合器环312和第二低速离合器环314沿第一轴向方向94移动至相应的接合位置,以及沿第二轴向方向96移动至相应的脱离位置。第一低速离合器环312和第二低速离合器环314可以远离第二级齿圈438地重新定位,并且例如在来自相应偏置部件的偏置力下和/或通过对应低速致动器212、214的操作而被移动至相应脱离位置。在一些示例中,第一低速致动器212和第二低速致动器214可以继续保持启用,以将第一低速离合器环312和第二低速离合器环314维持在相应接合位置中。可以将低速致动器212、214停用,以允许相应偏置部件(未示出)将低速离合器环312、314重新定位成远离第二级齿圈438。
在一些示例中,可以将第一低速离合器环312和第二低速离合器环314通过对应的第一低速保持机构324和第二低速保持机构326,相对于齿轮组400保持在一个或更多个轴向位置处。例如,可以将低速离合器环312、314通过对应的保持机构324、326,相对于第二级齿圈438保持在相应的接合位置中。在一个示例中,可以将保持机构324、326形成为经弹簧加载的球和定位(detent)机构。被施加至低速离合器环312、314的超过预定阈值的轴向力导致低速保持机构324、326释放对应低速离合器环312、314,以供相对于齿轮组400重新定位。
可以将所述一个或更多个第一低速离合器接合部件320以及所述一个或更多个第二低速离合器接合部件322设置为空腔、突起、齿、或卡爪,或其组合,这些空腔、突起、齿、或卡爪被配置为朝着第二级齿圈438定向的圆周接合。将所述一个或更多个第一低速齿轮接合部件520以及所述一个或更多个第二低速齿轮接合部件522设置在第二级齿圈438的轴面上,并且沿某一方向定向,以便选择性地与对应的第一低速离合器接合部件320和第二低速离合器接合部件322相互作用。
第一低速离合器接合部件320和第二低速离合器接合部件322各自形成有总体上面向某一时钟(旋转)方向的方形侧或垂直侧328、330以及相对于方形侧328、330成角度的斜坡侧332、334。第一低速齿轮接合部件520和第二低速齿轮接合部件522各自形成有方形侧或垂直侧528、530,该方形侧或垂直侧总体上面向某一时钟方向,与对应的第一低速离合器环接合部件320的方形侧328和第二低速离合器环接合部件322的方形侧330相对。第一低速齿轮接合部件520和第二低速齿轮接合部件522各自形成有斜坡侧(ramped side)532、534,该斜坡侧总体上面向某一方向,与对应的第一低速离合器接合部件320的斜坡侧332和第二低速离合器接合部件322的斜坡侧334相对。
在一个示例中,第一低速离合器接合部件320的方形侧328总体上面向第二时钟方向D2,并且第一低速齿轮接合部件520的方形侧528总体上面向第一时钟方向D1。第一低速离合器接合部件320的斜坡侧332部分地面向第一时钟方向D1,并且第一低速齿轮接合部件520的斜坡侧532部分地面向第二时钟方向D2。
在第一低速离合器环312的接合位置中,对应的第一低速离合器接合部件320的方形侧328和第一低速齿轮接合部件520的方形侧528是以彼此相对的关系设置的,并且被配置成例如响应于将力施加至第二级齿圈438而彼此相互作用,以实现第二级齿圈438沿第一时钟方向D1绕驱动轴线92的旋转。另外,对应的第一低速离合器接合部件320的斜坡侧332和第一低速齿轮接合部件520的斜坡侧532是以彼此相对的关系设置的,并且被配置成例如响应于第二级齿圈438相对于第一低速离合器环312沿第二时钟方向D2的旋转而彼此相互作用。
使第一低速离合器环312接地至第一毂106。因此,在第一低速离合器环312的接合位置中,通过对应的接合部件320的方形侧328与接合部件520的方形侧528之间的相互作用,而使第二级齿圈438在第一时钟方向D1上接地,即,保持不旋转。此外,第二级齿圈438可以通过对应的接合部件320的斜坡侧332与接合部件520的斜坡侧532之间的相互作用,而相对于第一低速离合器环312在第二时钟方向D2上“过速(overrun)”或“滑移(slip)”(例如,沿着这些斜坡滑动)。在该示例中,这些斜坡侧332、532之间的相互作用致使轴向力被施加至第一低速离合器环312。如果该轴向力足以克服第一低速保持机构324的保持力,则第一低速离合器环312沿轴向移动远离第二级齿圈438。在一个示例中,第一低速离合器接合部件320移动脱离与第一低速齿轮接合部件520的接合,使得第一低速离合器环312可以被认为脱离齿轮组400。
此外,在该示例中,第二低速离合器接合部件322的方形侧330总体上面向第一时钟方向D1,并且第二低速齿轮接合部件522的方形侧530总体上面向第二时钟方向D2。第二低速离合器接合部件322的斜坡侧334部分地面向第二时钟方向D2,并且第二低速齿轮接合部件522的斜坡侧534部分地面向第一时钟方向D1。
在第二低速离合器环314的接合位置中,对应的第二低速离合器接合部件322的方形侧330和第二低速齿轮接合部件522的方形侧530是以相对的关系设置的,并且被配置成例如响应于将力施加至第二级齿圈438而彼此相互作用,以实现第二级齿圈438沿第二时钟方向D2绕驱动轴线92的旋转。另外,对应的第二低速离合器接合部件322的斜坡侧334和第二低速齿轮接合部件522的斜坡侧534是以相对的关系设置的,并且被配置成例如响应于第二级齿圈438相对于第二低速离合器环314沿第一时钟方向D1的旋转而彼此相互作用。
使第二低速离合器环314接地至第一毂106。因此,在第二低速离合器环314的接合位置中,通过对应的接合部件322的方形侧330与接合部件522的方形侧530之间的相互作用,而使第二级齿圈438在第二时钟方向D2上接地,即,保持不旋转(against rotation)。此外,第二级齿圈438可以通过对应的接合部件322的斜坡侧334与接合部件522的斜坡侧534之间的相互作用,而相对于第二低速离合器环314在第一时钟方向D1上“过速”或“滑移”(例如,沿着这些斜坡滑动)。在该示例中,对应的接合部件322的斜坡侧334与接合部件522的斜坡侧534之间的相互作用致使轴向力被施加至第二低速离合器环314。如果该轴向力足以克服第二低速保持机构326的保持力,则第二低速离合器环314沿轴向移动远离第二级齿圈438。在一个示例中,第二低速离合器接合部件322移动脱离与第二低速齿轮接合部件522的接合,使得第二低速离合器环314可以被认为脱离齿轮组400。
第一低速离合器环312和第二低速离合器环314可以由对应的低速致动器212、214单独地并且彼此独立地进行重新定位。因此,第一低速离合器环312和第二低速离合器环314可以被认为具有:第一共同位置(collective position),在该第一共同位置中,第一低速离合器环312和第二低速离合器环314脱离齿轮组400;第二共同位置,在该第二共同位置中,第一低速离合器环312接合齿轮组400,并且第二低速离合器环314脱离齿轮组400;第三共同位置,在该第三共同位置中,第一低速离合器环312脱离齿轮组400,并且第二低速离合器环314接合齿轮组400;以及第四共同位置,在该第四共同位置中,第一低速离合器环312和第二低速离合器环314接合齿轮组400。
在第一共同位置中,第二级齿圈438可以相对于低速离合器环312、314沿第一时钟方向D1和第二时钟方向D2旋转。在第二共同位置中,低速离合器装置310可以被认为是沿第一时钟方向D1而非沿第二时钟方向D2单向地接合以使第二级齿圈438接地。在第三共同位置中,低速离合器装置310可以被认为是沿第二时钟方向D2而非沿第一时钟方向D1单向地接合以使第二级齿圈438接地。在第四共同位置中,低速离合器装置310可以被认为是沿第一时钟方向D1和第二时钟方向D2双向地接合以使第二级齿圈438接地。
继续参照图8,并且另外参照图12至图14,将中速离合器装置340示出为相对于齿轮组400的另一部分定位。在一个示例中,中速离合器装置340包括第一中速离合器环342和第二中速离合器环344。第一中速离合器环342和第二中速离合器环344是大体环形的并且被定位成用于沿着第二毂108朝着和远离齿轮组400轴向移动。在一个示例中,第一中速离合器环342外接第二毂108并且由第二毂108接地,例如,通过花键接合。第二中速离合器环344由第二毂108外接并且由第二毂108接地,例如,通过花键接合。
第一中速离合器环342和第二中速离合器环344总体上被定位成邻近第一级齿轮架416。第一中速离合器环342和第二中速离合器环344包括安装结构或短突出部346、348,使得第一中速离合器环342联接至第一中速连杆252,并且第二中速离合器环344联接至第二中速连杆254,以供对应中速致动器242、244进行致动。实际上,第一中速离合器环342和第二中速离合器环344可以被认为是分叉的离合器装置。
第一中速离合器环342包括一个或更多个第一中速离合器接合部件350,这些第一中速离合器接合部件被配置为与第一级齿轮架416选择性地接合和脱离。在一个示例中,第一中速离合器接合部件350可以选择性地接合和脱离第一级齿轮架416上的对应第一中速齿轮接合部件550。
第二中速离合器环344包括一个或更多个第二中速离合器接合部件352,这些第二中速离合器接合部件被配置为与第一级齿轮架416选择性地接合和脱离。在一个示例中,第二中速离合器接合部件352可以选择性地接合和脱离第一级齿轮架416的对应第二中速齿轮接合部件552。
因此,可以通过中速致动器242、244经由中速连杆252、254将中速离合器装置340选择性地重新定位到相对于第一级齿轮架416的不同位置中。在一个示例中,将第一中速离合器环342配置成,使得第一中速致动器242起作用,以经由第一中速连杆252将第一中速离合器环342朝着第一级齿轮架416重新定位至接合位置,在该接合位置中,第一中速离合器接合部件350与对应第一中速齿轮接合部件550接合。相反地,可以将第一中速离合器环342远离第一级齿轮架416地重新定位至脱离位置,在该脱离位置中,第一中速离合器接合部件350脱离对应第一中速齿轮接合部件550。
类似地,将第二中速离合器环344配置成,使得第二中速致动器244起作用,以经由第二中速连杆254将第二中速离合器环344朝着第一级齿轮架416重新定位至接合位置,在该接合位置中,第二中速离合器接合部件352与对应第二中速齿轮接合部件552接合。相反地,可以将第二中速离合器环344远离第一级齿轮架416地重新定位至脱离位置,在该脱离位置中,第二中速离合器接合部件352脱离对应第二中速齿轮接合部件552。
当从脱离位置重新定位至接合位置以及从接合位置重新定位至脱离位置时,第一中速离合器环342和第二中速离合器环344是沿轴向移动的。在一个示例中,第一中速离合器环342和第二中速离合器环344沿第一轴向方向94移动至相应的接合位置,以及沿第二轴向方向96移动至相应的脱离位置。第一中速离合器环342和第二中速离合器环344可以远离第一级齿轮架416地重新定位,并且例如在来自相应偏置部件的偏置力下和/或通过对应中速致动器242、244的操作而被移动至相应的脱离位置。在一些示例中,第一中速致动器242和第二中速致动器244可以继续保持启用,以将第一中速离合器环342和第二中速离合器环344维持在相应的接合位置中。可以将中速致动器342、344停用,以允许相应的偏置部件(未示出)将中速离合器环342、344重新定位成远离第一级齿轮架416。
在一些示例中,可以将第一中速离合器环342和第二中速离合器环344通过对应的第一中速保持机构354和第二中速保持机构356,相对于齿轮组400保持在一个或更多个轴向位置处。例如,可以将中速离合器环342、344通过对应的保持机构354、356,相对于第一级齿轮架416保持在相应的接合位置中。在一个示例中,可以将保持机构354、356形成为经弹簧加载的球和定位机构。被施加至中速离合器环342、344的超过预定阈值的轴向力导致中速保持机构354、356释放对应中速离合器环342、344,以供相对于齿轮组400重新定位。
可以将所述一个或更多个第一中速离合器接合部件350以及所述一个或更多个第二中速离合器接合部件352设置为空腔(cavities)、突起(protrusions)、齿、或卡爪(dogs),或其组合,这些空腔、突起、齿、或卡爪被配置为朝着第一级齿轮架416定向的圆周接合。将所述一个或更多个第一中速齿轮接合部件550以及所述一个或更多个第二中速齿轮接合部件552设置在第一级齿轮架416的轴面上,并且沿某一方向定向,以便选择性地与对应的第一中速离合器接合部件350和第二中速离合器接合部件352相互作用。
第一中速离合器接合部件350和第二中速离合器接合部件352各自形成有总体上面向某一时钟(旋转)方向的方形侧或垂直侧358、360以及相对于方形侧358、360成角度的斜坡侧362、364。第一中速齿轮接合部件550和第二中速齿轮接合部件552各自形成有方形侧或垂直侧558、560,该方形侧或垂直侧总体上面向某一时钟方向,与对应的第一中速离合器环接合部件350的方形侧358和第二中速离合器环接合部件352的方形侧360相对。第一中速齿轮接合部件550和第二中速齿轮接合部件552各自形成有斜坡侧562、564,该斜坡侧总体上面向某一方向,与对应的第一中速离合器接合部件350的斜坡侧362和第二中速离合器接合部件352的斜坡侧364相对。
在一个示例中,第一中速离合器接合部件350的方形侧358总体上面向第二时钟方向D2,并且第一中速齿轮接合部件550的方形侧558总体上面向第一时钟方向D1。第一中速离合器接合部件350的斜坡侧362部分地面向第一时钟方向D1,并且第一中速齿轮接合部件550的斜坡侧562部分地面向第二时钟方向D2。
在第一中速离合器环342的接合位置中,对应的第一中速离合器接合部件350的方形侧358和第一中速齿轮接合部件550的方形侧558是以彼此相对的关系设置的,并且被配置成例如响应于将力施加至第一级齿轮架416而彼此相互作用,以实现第一级齿轮架416沿第一时钟方向D1绕驱动轴线92的旋转。另外,对应的第一中速离合器接合部件350的斜坡侧362和第一中速齿轮接合部件550的斜坡侧562是以彼此相对的关系设置的,并且被配置成例如响应于第一级齿轮架416相对于第一中速离合器环342沿第二时钟方向D2的旋转而彼此相互作用。
使第一中速离合器环342接地至第二毂108。因此,在第一中速离合器环342的接合位置中,通过对应的接合部件350的方形侧358与接合部件550的方形侧558之间的相互作用,而使第一级齿轮架416在第一时钟方向D1上接地,即,保持不旋转。此外,第一级齿轮架416可以通过对应的接合部件350的斜坡侧362与接合部件550的斜坡侧562之间的相互作用,而相对于第一中速离合器环342在第二时钟方向D2上“过速”或“滑移”(例如,沿着这些斜坡滑动)。在该示例中,这些斜坡侧362、562之间的相互作用致使轴向力被施加至第一中速离合器环342。如果该轴向力足以克服第一中速保持机构354的保持力,则第一中速离合器环342沿轴向移动远离第一级齿轮架416。在一个示例中,第一中速离合器接合部件350移动脱离与第一中速齿轮接合部件550的接合,使得第一中速离合器环342可以被认为脱离齿轮组400。
此外,在该示例中,第二中速离合器接合部件352的方形侧360总体上面向第一时钟方向D1,并且第二中速齿轮接合部件552的方形侧560总体上面向第二时钟方向D2。第二中速离合器接合部件352的斜坡侧364部分地面向第二时钟方向D2,并且第二中速齿轮接合部件552的斜坡侧564部分地面向第一时钟方向D1。
在第二中速离合器环344的接合位置中,对应的第二中速离合器接合部件352的方形侧360和第二中速齿轮接合部件552的方形侧560是以相对的关系设置的,并且被配置成例如响应于将力施加至第一级齿轮架416而彼此相互作用,以实现第一级齿轮架416沿第二时钟方向D2绕驱动轴线92的旋转。另外,对应的第二中速离合器接合部件352的斜坡侧364和第二中速齿轮接合部件552的斜坡侧564是以相对的关系设置的,并且被配置成例如响应于第一级齿轮架416相对于第二中速离合器环344沿第一时钟方向D1的旋转而彼此相互作用。
使第二中速离合器环344接地至第一毂106。因此,在第二中速离合器环344的接合位置中,通过对应的接合部件352的方形侧360与接合部件552的方形侧560之间的相互作用,而使第一级齿轮架416在第二时钟方向D2上接地,即,保持不旋转。此外,第一级齿轮架416可以通过对应的接合部件352的斜坡侧364与接合部件552的斜坡侧564之间的相互作用,而相对于第二中速离合器环344在第一时钟方向D1上“过速”或“滑移”(例如,沿着这些斜坡滑动)。在该示例中,对应的接合部件352的斜坡侧364与接合部件552的斜坡侧564之间的相互作用致使轴向力被施加至第二中速离合器环344。如果该轴向力足以克服第二中速保持机构356的保持力,则第二中速离合器环344沿轴向移动远离第一级齿轮架416。在一个示例中,第二中速离合器接合部件352移动脱离与第二中速齿轮接合部件552的接合,使得第二中速离合器环344可以被认为脱离齿轮组400。
第一中速离合器环342和第二中速离合器环344可以由对应的中速致动器242、244单独地并且彼此独立地进行重新定位。因此,第一中速离合器环342和第二中速离合器环344可以被认为具有:第一共同位置,在该第一共同位置中,第一中速离合器环342和第二中速离合器环344脱离齿轮组400;第二共同位置,在该第二共同位置中,第一中速离合器环342接合齿轮组400,并且第二中速离合器环344脱离齿轮组400;第三共同位置,在该第三共同位置中,第一中速离合器环342脱离齿轮组400,并且第二中速离合器环344接合齿轮组400;以及第四共同位置,在该第四共同位置中,第一中速离合器环342和第二中速离合器环344接合齿轮组400。
在第一共同位置中,第一级齿轮架416可以相对于中速离合器环342、344沿第一时钟方向D1和第二时钟方向D2旋转。在第二共同位置中,中速离合器装置340可以被认为是沿第一时钟方向D1而非沿第二时钟方向D2单向地接合以使第一级齿轮架416接地。在第三共同位置中,中速离合器装置340可以被认为是沿第二时钟方向D2而非沿第一时钟方向D1单向地接合以使第一级齿轮架416接地。在第四共同位置中,中速离合器装置340可以被认为是沿第一时钟方向D1和第二时钟方向D2双向地接合以使第一级齿轮架416接地。
再次参照图8,并且继续参考图15至图17,将高速离合器装置370示出为相对于齿轮组400的另一部分定位。在一个示例中,高速离合器装置370包括第一高速离合器环372和第二高速离合器环374。第一高速离合器环372和第二高速离合器环374是大体环形的并且被定位成用于沿着驱动轴90朝着和远离齿轮组400轴向移动。在一个示例中,第一高速离合器环372和第二高速离合器环374外接并且例如通过花键接合而抗旋转地固定至驱动轴90。
第一高速离合器环372和第二高速离合器环374总体上被定位成邻近第一级齿轮架416。第一高速离合器环372和第二高速离合器环374包括安装结构或短突出部376、378,使得第一高速离合器环372联接至第一高速连杆282,并且第二高速离合器环374联接至第二高速连杆284,以供对应高速致动器272、274进行致动。实际上,第一高速离合器环372和第二高速离合器环374可以被认为是分叉的离合器装置。
第一高速离合器环372包括一个或更多个第一高速离合器接合部件380,所述一个或更多个第一高速离合器接合部件380被配置为与第一级齿轮架416选择性地接合和脱离。在一个示例中,第一高速离合器接合部件380可以选择性地接合和脱离第一级齿轮架416上的对应第一高速齿轮接合部件580。
第二高速离合器环374包括一个或更多个第二高速离合器接合部件382,所述一个或更多个第一高速离合器接合部件被配置为与第一级齿轮架416选择性地接合和脱离。在一个示例中,第二高速离合器接合部件382可以选择性地接合和脱离第一级齿轮架416的对应第二高速齿轮接合部件582。
因此,可以通过高速致动器272、274经由连杆282、284将高速离合器装置370选择性地重新定位到相对于第一级齿轮架416的不同位置中。在一个示例中,将第一高速离合器环372配置成,使得第一高速致动器272起作用,以经由第一高速连杆282将第一高速离合器环372朝着第一级齿轮架416重新定位至接合位置,在该接合位置中,第一高速离合器接合部件380与对应第一高速齿轮接合部件580接合。相反地,可以将第一高速离合器环372远离第一级齿轮架416地重新定位至脱离位置,在该脱离位置中,第一高速离合器接合部件380脱离对应第一高速齿轮接合部件580。
类似地,将第二高速离合器环374配置成,使得第二高速致动器274起作用,以经由第二高速连杆284将第二高速离合器环374朝着第一级齿轮架416重新定位至接合位置,在该接合位置中,第二高速离合器接合部件382与对应第二高速齿轮接合部件582接合。相反地,可以将第二高速离合器环374远离第一级齿轮架416地重新定位至脱离位置,在该脱离位置中,第二高速离合器接合部件382脱离对应第二高速齿轮接合部件582。
当从脱离位置重新定位至接合位置以及从接合位置重新定位至脱离位置时,第一高速离合器环372和第二高速离合器环374是沿轴向移动的。在一个示例中,第一高速离合器环372和第二高速离合器环374沿第一轴向方向94移动至相应的接合位置,以及沿第二轴向方向移动至相应的脱离位置。第一高速离合器环372和第二高速离合器环374可以远离第一级齿轮架416地重新定位,并且例如在来自相应偏置部件的偏置力下和/或通过对应高速致动器272、274的操作而被移动至相应的脱离位置。在一些示例中,第一高速致动器272和第二高速致动器274可以继续保持启用,以将第一高速离合器环372和第二高速离合器环374维持在相应的接合位置中。可以将高速致动器272、274停用,以允许相应的偏置部件(未示出)将高速离合器环372、374重新定位成远离第一级齿轮架416。
在一些示例中,可以将第一高速离合器环372和第二高速离合器环374通过对应的第一高速保持机构384和第二高速保持机构386,相对于齿轮组400保持在一个或更多个轴向位置处。例如,可以将高速离合器环372、374通过对应的保持机构384、386,相对于第一级齿轮架416保持在相应的接合位置中。在一个示例中,可以将保持机构384、386形成为经弹簧加载的球和定位机构。被施加至高速离合器环372、374的超过预定阈值的轴向力导致高速保持机构384、386释放对应高速离合器环372、374,以供相对于齿轮组400重新定位。
可以将所述一个或更多个第一高速离合器接合部件380以及所述一个或更多个第二高速离合器接合部件382设置为空腔、突起、齿、或卡爪,或其组合,这些空腔、突起、齿、或卡爪被配置为朝着第一级齿轮架416定向的圆周接合。将所述一个或更多个第一高速齿轮接合部件580以及所述一个或更多个第二高速齿轮接合部件582设置在第一级齿轮架416的轴面上,并且沿某一方向定向,以便选择性地与对应的第一高速离合器接合部件380和第二高速离合器接合部件382相互作用。
第一高速离合器接合部件380和第二高速离合器接合部件382各自形成有总体上面向某一时钟(旋转)方向的方形侧或垂直侧388、390以及相对于方形侧388、390成角度的斜坡侧392、394。第一高速齿轮接合部件580和第二高速齿轮接合部件582各自形成有方形侧或垂直侧588、590,该方形侧或垂直侧588、59总体上面向某一时钟方向,与对应的第一高速离合器接合部件380的方形侧388和第二高速离合器接合部件382的方形侧390相对。第一高速齿轮接合部件580和第二高速齿轮接合部件582各自形成有斜坡侧592、594,该斜坡侧总体上面向某一方向,与对应的第一高速离合器接合部件380的斜坡侧392和第二高速离合器接合部件382的斜坡侧394相对。
在一个示例中,第一高速离合器接合部件380的方形侧388总体上面向第二时钟方向D2,并且第一高速齿轮接合部件580的方形侧558总体上面向第一时钟方向D1。第一高速离合器接合部件380的斜坡侧392部分地面向第一时钟方向D1,并且第一高速齿轮接合部件580的斜坡侧592部分地面向第二时钟方向D2。
在第一高速离合器环372的接合位置中,对应的第一高速离合器接合部件380的方形侧388和第一高速齿轮接合部件580的方形侧588是以相对的关系(opposingrelationship)设置的,并且被配置成例如响应于驱动轴90和第一高速离合器环372沿第二时钟方向D2的旋转而彼此相互作用。另外,对应的第一高速离合器接合部件380的斜坡侧392和第一高速齿轮接合部件580的斜坡侧592是以彼此相对的关系设置的,并且被配置成例如响应于驱动轴90和第一高速离合器环372相对于第一级齿轮架416沿第一时钟方向D1的旋转而彼此相互作用。
可以将第一高速离合器环372抗旋转地固定至驱动轴90并由此与驱动轴90一起旋转。因此,在第一高速离合器环372的接合位置中,驱动轴90沿第二时钟方向D2的旋转致使第一高速离合器环372沿第二时钟方向D2旋转,并且通过对应的接合部件380、580的方形侧388、588之间的相互作用沿第二时钟方向D2向第一级齿轮架416施加旋转力。以这种方式,第一高速离合器环372驱动第一级齿轮架416沿第二时钟方向D2旋转。此外,第一高速离合器环372可以通过对应的接合部件380的斜坡侧392与接合部件580的斜坡侧592之间的相互作用,而相对于第一级齿轮架416在第一时钟方向D1上“过速”或“滑移”(例如,沿着这些斜坡滑动)。在该示例中,这些斜坡侧392、592之间的相互作用致使轴向力被施加至第一高速离合器环372。如果该轴向力足以克服第一高速保持机构384的保持力,则第一高速离合器环372沿轴向移动远离第一级齿轮架416。在一个示例中,第一高速离合器接合部件380移动脱离与第一高速齿轮接合部件580的接合,使得第一高速离合器环372可以被认为脱离齿轮组400。
此外,在该示例中,第二高速离合器接合部件382的方形侧390总体上面向第一时钟方向D1,并且第二高速齿轮接合部件582的方形侧590总体上面向第二时钟方向D2。第二高速离合器接合部件382的斜坡侧394部分地面向第二时钟方向D2,并且第二高速齿轮接合部件582的斜坡侧594部分地面向第一时钟方向D1。
在第二高速离合器环374的接合位置中,对应的第二高速离合器接合部件382的方形侧390和第二高速齿轮接合部件582的方形侧590是以相对的关系设置的,并且被配置成例如响应于驱动轴90和第二高速离合器环374沿第一时钟方向D1的旋转而彼此相互作用。另外,对应的第二高速离合器接合部件382的斜坡侧394和第二高速齿轮接合部件582的斜坡侧594是以相对的关系设置的,并且被配置成例如响应于驱动轴90和第二高速离合器环374相对于第一级齿轮架416沿第二时钟方向D2的旋转而彼此相互作用。
可以将第二高速离合器环374抗旋转地固定至驱动轴90并由此与驱动轴90一起旋转。因此,在第二高速离合器环374的接合位置中,驱动轴90沿第一时钟方向D1的旋转致使第二高速离合器环374沿第一时钟方向D1旋转,并且通过对应的接合部件382、582的方形侧390、590之间的相互作用沿第一时钟方向D1向第一级齿轮架416施加旋转力。以这种方式,第二高速离合器环374驱动第一级齿轮架416沿第一时钟方向D1旋转。此外,第二高速离合器环374可以通过对应的接合部件382的斜坡侧394与接合部件582的斜坡侧594之间的相互作用,而相对于第一级齿轮架416在第二时钟方向D2上“过速”或“滑移”(例如,沿着这些斜坡滑动)。在该示例中,对应的接合部件382的斜坡侧394与接合部件582的斜坡侧594之间的相互作用致使轴向力被施加至第二高速离合器环374。如果该轴向力足以克服第二高速保持机构386的保持力,则第二高速离合器环374沿轴向移动远离第一级齿轮架416。在一个示例中,第二高速离合器接合部件382移动脱离与第二高速齿轮接合部件582的接合,使得第二高速离合器环374可以被认为脱离齿轮组400。
第一高速离合器环372和第二高速离合器环374可以由对应的高速致动器272、274单独地并且彼此独立地进行重新定位。因此,第一高速离合器环372和第二高速离合器环374可以被认为具有:第一共同位置,在该第一共同位置中,第一高速离合器环372和第二高速离合器环374脱离齿轮组400;第二共同位置,在该第二共同位置中,第一高速离合器环372接合齿轮组400,并且第二高速离合器环374脱离齿轮组400;第三共同位置,在该第三共同位置中,第一高速离合器环372脱离齿轮组400,并且第二高速离合器环374接合齿轮组400;以及第四共同位置,在该第四共同位置中,第一高速离合器环372和第二高速离合器环374接合齿轮组400。
在第一共同位置中,第一高速离合器环372和第二高速离合器环374可以相对于第一级齿轮架416沿第一时钟方向D1和第二时钟方向D2旋转。在第二共同位置中,高速离合器装置370可以被认为是沿第二时钟方向D2而非沿第一时钟方向D1单向地接合以使第一级齿轮架416旋转。在第三共同位置中,高速离合器装置370可以被认为是沿第一时钟方向D1而非沿第二时钟方向D2单向地接合以使第一级齿轮架416接地。在第四共同位置中,高速离合器装置370可以被认为是沿第一时钟方向D1和第二时钟方向D2双向地接合以使第一级齿轮架416旋转。
离合器装置310、340、370与齿轮组400之间的相互作用修改了通过齿轮组400的动力流,以便于驱动总成56的不同工作模式(或“齿轮”)和不同输出方向(例如,作为时钟方向D1的“正向”和作为时钟方向D2的“反向”)。工作模式包括正向低速模式和反向低速模式、正向中速模式和反向中模式、以及正向高速模式和反向高速模式。
图19是驱动总成56的截面视图,其中,低速离合器装置310接合齿轮组400,并且中速离合器装置340和高速离合器装置370脱离齿轮组400,以便根据驱动轴90的时钟方向沿正向方向和反向方向提供低速模式。在低速模式下,低速离合器装置310使第二级齿圈438接地,并由此,保持第二级齿圈438相对于驱动总成56的固定部分不旋转。在正向低速模式下,使输入部件86沿第二时钟方向D2驱动,以使驱动轴90沿第二时钟方向D2旋转。第一级太阳齿轮412与驱动轴90一起沿第二时钟方向D2旋转,这进而经由第一级行星齿轮414实现第一级齿轮架416沿第二时钟方向D2的旋转。使第一级齿轮架416抗旋转地固定至第二级太阳齿轮432,并由此,实现第二级太阳齿轮432沿第二时钟方向D2的旋转。在第二级齿圈438通过低速离合器装置310接地的情况下,第二级太阳齿轮432经由第二级行星齿轮434实现第二级齿轮架436沿第二时钟方向D2的旋转。第二级齿轮架436充任输出部件88。因此,在正向低速模式下,第二级齿轮架436沿第二时钟方向D2旋转,以输出第一速度和第一转矩。在反向低速模式下,驱动轴90和第二级齿轮架436可以沿第一时钟方向D1旋转。
因此,在低速模式下,动力沿着驱动轴90流向第一级太阳齿轮412、第一级行星齿轮414以及第一级齿轮架416。动力从第一级齿轮架416流向第二级太阳齿轮432和第二级行星齿轮434,并且由包括或充任输出部件88的第二级齿轮架436输出。
在低速模式下,驱动轴90和包括输出部件88的第二级齿轮架436沿相同方向旋转。即,在低速模式下,输入旋转方向和输出旋转方向是相同的。例如,在正向低速模式下,驱动轴90和第二级齿轮架436都可以沿第二时钟方向D2旋转,而在反向低速模式下,驱动轴90和第二级齿轮架436都可以沿第一时钟方向D1旋转。
在一个示例中,驱动总成56可以在正向低速模式和反向低速模式的动力流方向上提供9:1的传动比。在其它的实施方式中,可以提供其它传动比。
图20是驱动总成56的截面视图,其中,中速离合器装置340接合齿轮组400,并且低速离合器装置310和高速离合器装置370脱离齿轮组400,以便根据驱动轴90的时钟方向沿正向方向和反向方向提供中速模式。在中速模式下,中速离合器装置340使第一级齿轮架416接地,并由此,保持第一级齿轮架416相对于驱动总成56的固定部分不旋转。在正向中速模式下,使输入部件86沿第一时钟方向D1驱动,以使驱动轴90沿第一时钟方向旋转。第一级太阳齿轮412与驱动轴90一起沿第一时钟方向D1旋转,这进而经由第一级行星齿轮414实现在相应的第一行星车轴424上的旋转。在使第一级齿轮架416接地的情况下,第一级行星齿轮414的旋转实现第一级齿圈418沿第二时钟方向D2的旋转。使第一级齿圈418例如通过齿轮架适配器450抗旋转地固定至第二级齿轮架436,并由此,实现第二级齿轮架436沿第二时钟方向D2的旋转。第二级齿轮架436充任或包括输出部件88。因此,在正向中速模式下,第二级齿轮架436沿第二时钟方向D2旋转,以输出第二速度和第二转矩。第二速度大于第一速度,并且第二转矩小于第一转矩。在反向中速模式下,驱动轴90可以沿第二时钟方向D2旋转,并且第二级齿轮架436可以沿第一时钟方向D1旋转。
因此,在中速模式下,动力沿着驱动轴90流向第一级太阳齿轮412、第一级行星齿轮414以及第一级齿圈418。动力从第一级齿圈416流向齿轮架适配器450,并且由包括或充任输出部件88的第二级齿轮架436输出。
在中速模式下,驱动轴90和包括输出部件88的第二级齿轮架436沿相反的方向旋转。即,在中速模式下,输入旋转方向和输出旋转方向是不同的。例如,在正向中速模式下,驱动轴90可以沿第一时钟方向D1旋转,并且第二级齿轮架436可以沿第二时钟方向D2旋转。而在反向中速模式下,驱动轴90可以沿第二时钟方向D2旋转,并且第二级齿轮架436可以沿第一时钟方向D1旋转。
在一个示例中,驱动总成56可以在正向中速模式和反向中速模式的动力流方向上提供3:1的传动比。在其它的实施方式中,可以提供其它传动比。将齿轮组400配置成,使得中速模式与低速模式之间的阶比为3:1。
图21是驱动总成56的截面视图,其中箭头指示高速离合器装置370用于接合齿轮组400的移动方向,并且低速离合器装置310和指示离合器装置340脱离齿轮组400,以便根据驱动轴90的时钟方向沿正向方向和反向方向提供高速模式。高速离合器装置370使驱动轴90抗旋转地固定至第一级齿轮架416,并由此,使得驱动轴90、高速离合器装置370、第一级太阳齿轮412以及第一级齿轮架416能够作为一个单元旋转。在正向高速模式下,使输入部件86沿第二时钟方向D2驱动,以使驱动轴90、高速离合器装置370、第一级太阳齿轮412以及第一级齿轮架416作为一个单元沿第二时钟方向D2旋转。作为一个单元旋转的第一级齿轮架416和第一级太阳齿轮412实现第一级行星齿轮414绕驱动轴线92沿第二时钟方向D2的共同旋转。第一级行星齿轮414也实现第一级齿圈418沿第二时钟方向D2的旋转。以这种方式,驱动轴90、高速离合器装置370、第一级太阳齿轮412、第一级齿轮架416、第一级行星齿轮414以及第一级齿圈418作为一个单元沿第二时钟方向D2旋转。在将第一级齿圈418经由齿轮架适配器450抗旋转地固定至第二级齿轮架436的情况下,第一级齿圈418实现第二级齿轮架436与第一级齿圈418作为一个单元沿第二时钟方向D2的旋转。第二级齿轮架436充任或包括输出部件88。因此,在正向高速模式下,第二级齿轮架436沿第二时钟方向D2旋转,以输出第三速度和第三转矩。第三速度大于第一速度和第二速度,并且第三转矩小于第一转矩和第二转矩。在反向高速模式下,驱动轴90和第二级齿轮架436可以沿第一时钟方向D1旋转。
因此,在高速模式下,动力沿着驱动轴90和高速离合器装置370流向第一级太阳齿轮412和第一级齿轮架416。动力从第一级太阳齿轮412和第一级齿轮架416流向第一级行星齿轮414,并进而流向第一级齿圈418。动力从第一级齿圈416经由齿轮架适配器450流向第二级齿轮架436,并且由包括或充任输出部件88的第二级齿轮架436输出。
应意识到,在将第一级齿轮架416经由第二级轴440抗旋转地固定至第二级太阳齿轮432的情况下,第一级齿轮架416和第二级太阳齿轮432作为一个单元沿与输入部件86和驱动轴90相同的方向一起旋转。第二级太阳齿轮432和第二级齿轮架436实现了:第二级行星齿轮434进而和第二级齿圈438与第二级齿轮架436和第二级太阳齿轮432作为一个单元一起绕驱动轴线92的共同旋转。因此,在高速模式下,驱动轴90驱动齿轮组400作为一个单元旋转。
还应意识到,动力可以从第一级齿轮架416流向第二级太阳齿轮432,进而流向第二级行星齿轮434。动力还可以从第二级齿轮架436例如经由第二行星车轴446流向第二级行星齿轮434。动力也可以从第二级行星齿轮434流向第二级齿圈438。
在高速模式下,驱动轴90和包括输出部件88的第二级齿轮架436沿相同的方向旋转。即,在高速模式下,输入旋转方向和输出旋转方向是相同的。例如,在正向高速模式下,驱动轴90和第二级齿轮架436都可以沿第二时钟方向D2旋转。在反向高速模式下,驱动轴90和第二级齿轮架436都可以沿第一时钟方向D1旋转。
在一个示例中,驱动总成56可以在正向高速模式和反向高速模式的动力流方向上提供1:1的传动比,即,直接传动比。在其它的实施方式中,可以提供其它传动比。将齿轮组400配置成,使得高速模式与中速模式之间的阶比为3:1。
以这种方式,高速离合器装置370可以基于输入部件86的方向而以双向性选择性地以正向高速模式和反向高速模式运行。如上所提到的,在其它示例中,可以将高速离合器装置配置成选择性地以单向运行(例如,利用多个齿环(gear ring))。
尽管上面参照三速驱动总成描述了驱动总成56,但是可以省略离合器装置310、340、370(以及相关联的致动器210、240、270)中的一者或更多者以产生两速驱动总成。此外,尽管第一离合器装置310和第二离合器装置340在上面被描述为分叉的离合器装置,但是各个离合器装置310、340的一个或更多个离合器环312、314、342、344可以被省略,以便实际上在从动方向上作为过速离合器来操作。可以提供根据上面所讨论的原理的任何适当的修改或配置。
以相同阶比来提供多个传动比的作业车辆多速驱动总成的列举示例
提供了以下示例,为了更容易参考对其进行了编号。
1.一种作业车辆的驱动总成,所述驱动总成包括:具有形成反作用构件的至少一个壳体部件的壳体装置;驱动轴,所述驱动轴能够沿第一时钟方向和选择性地沿第二时钟方向,相对于所述反作用构件绕驱动轴线旋转;以及行星齿轮组,所述行星齿轮组联接至所述驱动轴并且所述行星齿轮组被配置成,选择性地沿所述第一时钟方向和选择性地沿所述第二时钟方向旋转输出部件。所述行星齿轮组是两级行星齿轮组,所述两级行星齿轮组具有第一级太阳齿轮、第一级齿轮架、被支承在所述第一级齿轮架上的一组第一级行星齿轮、第一级齿圈、被抗旋转地固定至所述第一级齿轮架的第二级太阳齿轮、被抗旋转地固定至所述第一级齿圈的第二级齿轮架、被支承在所述第二级齿轮架上的一组第二级行星齿轮、以及第二级齿圈,其中,所述输出部件与所述第二级齿轮架一起旋转。所述驱动总成还包括:第一离合器装置,所述第一离合器装置被配置成,选择性地接合所述行星齿轮组,以实现所述输出部件的第一传动比以及第一输出转速和转矩;第二离合器装置,所述第二离合器装置被配置成,选择性地接合所述行星齿轮组,以实现所述输出部件的第二传动比以及第二输出转速和转矩,其中,从所述第一传动比到所述第二传动比的阶比为3:1;至少一个第一致动器,所述至少一个第一致动器被配置成,实现所述第一离合器装置沿着所述驱动轴线的移动,以选择性地接合所述行星齿轮组;以及至少一个第二致动器,所述至少一个第二致动器被配置成,沿着所述驱动轴线实现所述第二离合器装置的移动,以选择性地接合所述行星齿轮组。所述驱动轴和所述输出部件在所述第一离合器装置与所述行星齿轮组接合的情况下沿相同的时钟方向旋转,并且所述驱动轴和所述输出部件在所述第二离合器装置与所述行星齿轮组接合的情况下沿相反的时钟方向旋转。
2.根据示例1所述的驱动总成,其中,所述第二级齿轮架包括:第一个第二级齿轮架板,所述第一个第二级齿轮架板被抗旋转地固定至所述第一级齿圈并且支承所述第二级行星齿轮;以及第二个第二级齿轮架板,所述第二个第二级齿轮架板与所述第一个第二级齿轮架板间隔开并且被抗旋转地固定至所述第一个第二级齿轮架板。所述输出部件与所述第二个第二级齿轮架板一体地形成或者连接至所述第二个第二级齿轮架板。
3.根据示例1所述的驱动总成,所述驱动总成还包括第一毂,所述第一毂联接至所述反作用构件并且通过所述反作用构件接地。所述第一离合器装置是低速离合器装置,并且所述第一离合器装置包括:第一低速离合器环,所述第一低速离合器环被安装在所述第一毂上并且相对于所述第一毂保持不旋转;以及第二低速离合器环,所述第二低速离合器环被安装在所述第一毂上并且相对于所述第一毂保持不旋转。
4.根据示例3所述的驱动总成,其中,所述第一低速离合器环被配置成,选择性地接合所述第二级齿圈,以沿所述第一时钟方向和所述第二时钟方向中的一个时钟方向保持所述第二级齿圈不旋转,并且在所述第二级齿圈沿所述第一时钟方向和所述第二时钟方向中的另一时钟方向旋转的情况下过速所述第二级齿圈。所述第二低速离合器环被配置成,选择性地接合所述第二级齿圈,以沿所述第一时钟方向和所述第二时钟方向中的另一时钟方向保持所述第二级齿圈不旋转,并且在所述第二级齿圈沿所述第一时钟方向和所述第二时钟方向中的所述一个时钟方向旋转的情况下过速所述第二级齿圈。
5.根据示例3所述的驱动总成,其中,所述至少一个第一致动器包括至少一个第一低速致动器,所述至少一个第一低速致动器被配置成,实现所述第一低速离合器环相对于所述第二级齿圈沿着所述驱动轴线的移动。所述至少一个第一致动器还包括至少一个第二低速致动器,所述至少一个第二低速致动器被配置成,实现所述第二低速离合器环相对于所述第二级齿圈沿着所述驱动轴线的移动。
6.根据示例1所述的驱动总成,所述驱动总成还包括第二毂,所述第二毂联接至所述反作用构件并且通过所述反作用构件接地。所述第二离合器装置是中速离合器装置,并且所述第二离合器装置包括:第一中速离合器环,所述第一中速离合器环被安装在所述第二毂上并且相对于所述第二毂保持不旋转;以及第二中速离合器环,所述第二中速离合器环被安装在所述第二毂上并且相对于所述第二毂保持不旋转。
7.根据示例6所述的驱动总成,其中,所述第一中速离合器环被配置成,选择性地接合所述第一级齿轮架,以沿所述第一时钟方向和所述第二时钟方向中的一个时钟方向保持所述第一级齿轮架不旋转,并且在所述第一级齿轮架沿所述第一时钟方向和所述第二时钟方向中的另一时钟方向旋转的情况下过速所述第一级齿轮架。所述第二中速离合器环被配置成,选择性地接合所述第一级齿轮架,以沿所述第一时钟方向和所述第二时钟方向中的另一时钟方向保持所述第一级齿轮架不旋转,并且在所述第一级齿轮架沿所述第一时钟方向和所述第二时钟方向中的所述一个时钟方向旋转的情况下过速所述第一级齿轮架。
8.根据示例7所述的驱动总成,其中,所述至少一个第二致动器包括至少一个第一中速致动器,所述至少一个第一中速致动器被配置成,实现所述第一中速离合器环相对于所述第一级齿轮架沿着所述驱动轴线的移动。所述至少一个第二致动器还包括至少一个第二中速致动器,所述至少一个第二中速致动器被配置成,实现所述第二中速离合器环相对于所述第一级齿轮架沿着所述驱动轴线的移动。
9.根据示例1所述的驱动总成,所述驱动总成还包括第三离合器装置,所述第三离合器装置被配置成,选择性地接合所述行星齿轮组,以实现所述输出部件的第三传动比以及第三输出转速和转矩。从所述第二传动比到所述第三传动比的阶比为3:1。至少一个第三致动器被配置成,实现所述第三离合器装置沿着所述驱动轴线的移动,以选择性地接合所述行星齿轮组。所述驱动轴和输出部件在所述第三离合器装置与所述行星齿轮组接合的情况下沿相同的时钟方向旋转。
10.根据示例9所述的驱动总成,其中,所述第三离合器装置是高速离合器装置,并且所述第三离合器装置包括:第一高速离合器环,所述第一高速离合器环被安装在所述驱动轴上并且被旋转固定至所述驱动轴;以及第二高速离合器环,所述第二高速离合器环被安装在所述驱动轴上并且被旋转固定至所述驱动轴。
11.根据示例10所述的驱动总成,其中,所述第一高速离合器环被配置成,接合所述第一级齿轮架,以在所述驱动轴旋转的情况下驱动所述第一级齿轮架沿所述第一时钟方向和所述第二时钟方向中的一个时钟方向旋转,并且在所述驱动轴沿所述第一时钟方向和所述第二时钟方向中的另一时钟方向旋转的情况下过速所述第一级齿轮架。所述第二高速离合器环被配置成,接合所述第一级齿轮架,以驱动所述第一级齿轮架沿所述第一时钟方向和所述第二时钟方向中的另一时钟方向旋转,并且在所述驱动轴沿所述第一时钟方向和所述第二时钟方向中的所述一个时钟方向旋转的情况下过速所述第一级齿轮架。
12.根据示例11所述的驱动总成,其中,所述至少一个第三致动器包括至少一个第一高速致动器,所述至少一个第一高速致动器被配置成,实现所述第一高速离合器环相对于所述第一级齿轮架沿着所述驱动轴线的移动。所述至少一个第三致动器还包括至少一个第二高速致动器,所述至少一个第二高速致动器被配置成,实现所述第二高速离合器环相对于所述第一级齿轮架沿着所述驱动轴线的移动。
13.一种作业车辆的驱动总成,所述驱动总成包括:壳体装置,所述壳体装置具有形成固定反作用构件的第一壳体部件、第二壳体部件、第一毂以及第二毂;驱动轴,所述驱动轴能够沿第一时钟方向和选择性地沿第二时钟方向,相对于所述固定反作用构件绕驱动轴线旋转;以及行星齿轮组,所述行星齿轮组联接至所述驱动轴。所述行星齿轮组号包括:第一级太阳齿轮、第一级齿轮架、被支承在所述第一级齿轮架上的一组第一级行星齿轮、第一级齿圈、被抗旋转地固定至所述第一级齿轮架的第二级太阳齿轮、被抗旋转地固定至所述第一级齿圈的第二级齿轮架、被支承在所述第二级齿轮架上的一组第二级行星齿轮、以及第二级齿圈。所述驱动总成还包括:输出部件,所述输出部件能够沿所述第一时钟方向和选择性地沿所述第二时钟方向与所述第二级齿轮架一起旋转,以输出转速和转矩;低速离合器装置,所述低速离合器装置联接至所述第一毂,并且所述低速离合器装置被配置成,选择性地接合所述第二级齿圈,以实现这样的低速模式,即,在所述低速模式下,所述行星齿轮组提供低速传动比、所述驱动轴沿第二时钟方向旋转、以及所述输出部件沿所述第二时钟方向旋转;中速离合器装置,所述中速离合器装置联接至所述第二毂,并且所述中速离合器装置被配置成,选择性地接合所述第一级齿轮架,以实现这样的中速模式,即,在所述中速模式下,所述行星齿轮组以针对所述低速传动比的3:1阶比提供中速传动比、所述驱动轴沿所述第一时钟方向旋转、以及所述输出部件沿所述第二时钟方向旋转;以及高速离合器装置,所述高速离合器装置联接至所述驱动轴,并且所述高速离合器装置被配置成,选择性地接合所述第一级齿轮架,以实现这样的高速模式,即,在所述高速模式下,所述行星齿轮组以针对所述中速传动比的3:1阶比提供高速传动比、所述驱动轴沿所述第二时钟方向旋转、以及所述输出部件沿所述第二时钟方向旋转。
14.根据示例13所述的驱动总成,所述驱动总成还包括至少一个低速致动器,所述至少一个低速致动器被配置成,沿着所述驱动轴线重新定位所述低速离合器装置,以接合所述第二级齿圈,所述至少一个低速致动器被安装在所述第一毂上;至少一个中速致动器,所述至少一个中速致动器被配置成,沿着所述驱动轴线重新定位所述中速离合器装置,以接合所述第一级齿轮架,所述至少一个中速致动器被安装在致动器框架上,所述致动器框架被固定至所述第一壳体部件;以及至少一个高速致动器,所述至少一个高速致动器被配置成,沿着所述驱动轴线重新定位所述高速离合器装置,以接合所述第一级齿轮架,所述至少一个高速致动器被安装在所述致动器框架上,所述致动器框架被固定至所述第一壳体部件。
15.根据示例14所述的驱动总成,所述驱动总成还包括至少一个低速连杆,所述至少一个低速连杆在所述至少一个低速致动器与所述低速离合器装置之间进行互连;至少一个中速连杆,所述至少一个中速连杆在所述至少一个中速致动器与所述中速离合器装置之间进行互连;以及至少一个高速连杆,所述至少一个高速连杆在所述至少一个高速致动器与所述高速离合器装置之间进行互连。
结论
如本领域技术人员应意识到,可以将所公开的主题的某些方面具体实施为方法、系统(例如,被包括在作业车辆中的作业车辆控制系统)或计算机程序产品。因此,可以将某些实施方式全部具体实施为硬件、全部具体实施为软件(包括固件、驻留软件、微代码等)或者具体实施为软件和硬件(和其它)方面的组合。而且,这些实施方式可以采取在计算机可用存储介质上的计算机程序产品的形式,在该介质中具体实施有计算机可读程序代码。
可以利用任何合适的计算机可用或计算机可读介质。计算机可用介质可以是计算机可读信号介质和/或计算机可读存储介质。计算机可用或计算机可读存储介质(包括与计算装置或客户端电子装置相关联的存储装置)例如可以是但不限于,电子、磁性、光学、电磁、红外或半导体的系统、设备或装置,或者前述的任何合适组合。计算机可读介质的更具体的示例(非详尽列表)包括以下项:具有一条或更多条导线的电气连接部、便携式计算机盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦除可编程只读存储器(EPROM或闪速存储器)、光纤、便携式光盘只读存储器(CD-ROM)、光学存储装置。在本文的上下文中,计算机可用或计算机可读存储介质可以是可以包含或存储可供指令执行系统、设备或装置使用或者结合指令执行系统、设备或装置使用的程序的任何有形介质。
计算机可读信号介质可以包括且其中具体实施有计算机可读程序代码的传播数据信号,例如在基带中或者作为载波的部分。这种传播信号可以采取多种形式中的任一形式,包括但不限于电磁、光学或其任何合适的组合。计算机可读信号介质可以是非暂时性的并且可以作为不是计算机可读存储介质并且能够传送、传播或运输程序以供指令执行系统、设备或装置使用或者与之结合使用的任何计算机可读介质。
可以参照根据本公开的实施方式的方法、设备(系统)以及计算机程序产品的流程图例示和/或框图来描述本文所述的某些实施方式的各方面。应理解,可以通过计算机程序指令来实现任何这种流程图例示和/或框图中的各个框以及这种流程图例示和/或框图中的框的组合。可以将这些计算机程序指令提供给通用计算机的处理器、专用计算机和/或其它可编程数据处理设备以生成机器,以使经由该计算机的处理器或其它可编程数据处理设备执行的该指令创建用于实现在流程图和/或一个或多个框图框中指定的功能/动作的装置。
这些计算机程序指令还可以被存储在计算机可读介质中,其可以指导计算机或其它可编程数据处理设备按特定方式起作用,使得被存储在计算机可读介质中的指令生成包括实现在该流程图和/或一个或多个框图框中指定的功能/动作的指令的制品。
还可以将该计算机程序指令加载到计算机或者其它可编程数据处理设备上,以使在该计算机或者其它可编程设备上执行一系列可操作步骤,从而生成计算机实现处理,使得在该计算机或其它可编程设备上执行的这些指令提供实现在该流程图和/或一个或多个框图框中指定的功能/动作的步骤。
附图中的任何流程图和框图或者上面的类似讨论均可以例示根据本公开的各种实施方式的系统、方法以及计算机程序产品的可能实现的架构、功能以及操作。在这点上,这些流程图或框图中的各个框可以表示包括用于实现所指定的逻辑功能的一个或更多个可执行指令的模块、程序段或代码部分。还应注意,在一些另选实现中,框中提到的功能(或者本文所描述的其它方面)可以出现在图中所提到的次序之外。例如,根据所涉及功能,接连示出的两个框(或者接连描述的两个操作)事实上可以大致同时执行,或者这些框(或操作)有时可以按逆序执行。还应注意,任何框图和/或流程图例示中的各个框,以及任何框图和/或流程图例示中的框的组合可以通过执行指定功能或动作的基于专用硬件的系统或者专用硬件与计算机指令的组合来实现。
本文所使用的术语仅是用来描述特定的实施方式,并非旨在限制本公开。如本文所使用的,除非上下文另外明确指示,否则单数形式的描述旨在包括复数形式。还应理解,当在本文中使用时,术语“包括(comprise和/或comprising)”指定存在规定特征、要件、步骤、操作、要素和/或组件,而非排除存在或增加一个或更多个其它的特征、要件、步骤、操作、要素、组件和/或这些的组合。
已经出于例示和描述的目的,呈现了本公开的描述,但并非旨在排它或按所公开的形式对本公开进行限制。在不脱离本公开的范围和精神的情况下,许多修改和变型对于本领域普通技术人员将是显而易见的。选择和描述在本文中明确引用的实施方式,以便最好地解释本公开的原理及其实际应用,并且使得本领域普通技术人员能够理解本公开并且认识针对所描述的示例的许多另选例、修改例以及变型例。因此,除了明确描述的实施方式和实现以外的其它各种实施方式和实现都处于所附权利要求的范围之内。
- 一种电动车辆、电驱动动力总成及其线束系统
- 具有输出控制离合器的作业车辆多速驱动总成
- 具有离合器保持机构的作业车辆多速驱动总成