用于自动导引车辆的夹持系统
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及一种用于自动导引车辆的夹持系统,该夹持系统用于对接和脱离推车并且用于拉动和推动推车。更具体地,本发明涉及一种操纵器型夹持系统。
背景技术
在一个结构内或多个结构之间的物品运输在某种程度上已经造成了问题。例如,拥有超过500张病床的医院需要花费相当多的工作时间来物理移动织物、医学标本、药物、血液制品、病人图表、x光设备和餐食。
如今,许多运输选项作为商业产品存在,例如传送带、气动管、万向推车和移动机器人。移动机器人,尤其是自动导引车辆(AGV)已经配备了在计算机控制下的驱动系统,这允许在多个位置之间进行自动导引。
用AGV上的后部安装的牵引装置牵引推车在本领域中是众所周知的。通常,商业挂接装置和球头安装在AGV的一端部处,通常是后部,在此处连接包括可释放插座和牵引杆的推车。
美国专利申请第15/566516号(公开号US2018/0281178)公开了一种移动机器人系统,其包括AGV和安装在AGV上的夹持装置。AGV包括车轮驱动马达、车载计算机、用于在具有障碍物的移动的环境中导航、定向和操纵的装置、传感器系统以及用于接收和发送信号的无线通信系统。夹持系统包括用于将夹持系统附接至AGV的基座、臂以及用于夹持推车的夹持器。此类夹持系统的主要挑战在于,推车拉动AGV相对于推车的位置必须非常精确,以便能够夹持推车。这可能需要多次对接和再对接的尝试,和/或需要以低速进行对接。现有技术的另一个挑战是,在夹持机构被激活之前和/或被激活的同时,没有关于夹持器是否与推车的连接部件正确对准的安全指示。这可能导致夹持装置与推车之间的不正确/弱的联接,并且可能导致需要额外的联接尝试、增加联接机构的磨损和撕裂,并且导致推车在运输过程中丢失的情况。
现有技术解决方案的另一挑战在于,没有关于推车是否正确地从推车拉动车辆脱离的安全指示。这可能导致这样的情况:当车辆处于“无推车”行驶模式时,推车仍然意外地附接到推车拉动车辆,并且在绕过障碍物和结构元件行进时没考虑意外地附接的推车的额外足迹。
本发明的目的是改进现有技术并提供一种用于AGV的具有安全、可靠和快速夹持机构的车辆夹持系统以及一种具有此类系统的AGV。本发明的另一个目的是提高平稳地夹持各种推车以进行安全的拉动或推动操作的可能性,这些推车可以是或可以不是专门为自动运输设计的。另一个目的是当应该没有推车被连接时,提供具有夹持系统的AGV的更安全的操作。
发明内容
根据本发明的一个方面,公开了一种用于自动导引车辆(AGV)的夹持系统1。夹持系统1包括用于将夹持系统1附接至AGV的本体4的基座2、用于操纵端部执行器8的臂6,该端部执行器用于夹持由AGV牵引或推动的推车。臂6在一端部处枢转地附接到基座2,从而允许臂6相对于AGV的偏转运动。在臂6的另一端部处设有附接到臂6的端部执行器8。端部执行器8的高度由臂6的致动器14调节。
端部执行器8经由枢转连接件10附接到臂6。这允许端部执行器8相对于臂6的滚动运动,同时限制该端部执行器相对于该臂的偏转运动。如果只有传感器臂20a、20b中的一个传感器臂被压靠在推车的连接部件上,
端部执行器8的两个传感器臂20a、20b适于使得端部执行器8围绕其枢转连接件10枢转。传感器臂20a、20b还适于当被压靠在推车的连接部件上时激活传感器22a、22b,由此信号被发送到夹持装置的控制系统,以便指示端部执行器是否处于用于将夹紧力施加到推车的连接部件上的正确位置。端部执行器8设置有钩11和多个支架13a、13b,该钩和支架适于通过在支架13a、13b的方向上移动钩11而在推车框架的一部分上施加夹紧力。另一传感器激活元件11a附接至钩11,用于激活附接至前端面21的另一传感器23。当传感器23被激活时,其向夹持装置的控制系统发送信号,指示钩11完全收缩。
根据本发明的另一方面,公开了一种包括夹持系统1的自动导引车辆。自动导引车辆包括驱动轮、安装在所述驱动轮上的机器人本体4、利用导航系统的控制系统,以及安装在所述机器人本体4上用于将推车联接到所述车辆上的夹持系统1。AGV还包括安装在机器人本体4上的至少一个接近传感器4.1、4.2。控制系统联接到所述至少一个接近传感器4.1、4.2,用于调整计算出的机器人位置并检测任何障碍物。
附图说明
被认为是新型且具有创造性的本发明的特征在所附权利要求书中具体阐述。然而,本发明本身可以通过参考本发明的以下具体实施方式获得最佳理解,该具体实施方式描述了结合附图在本发明的非限制性示例中给出的示例性实施方案,其中:
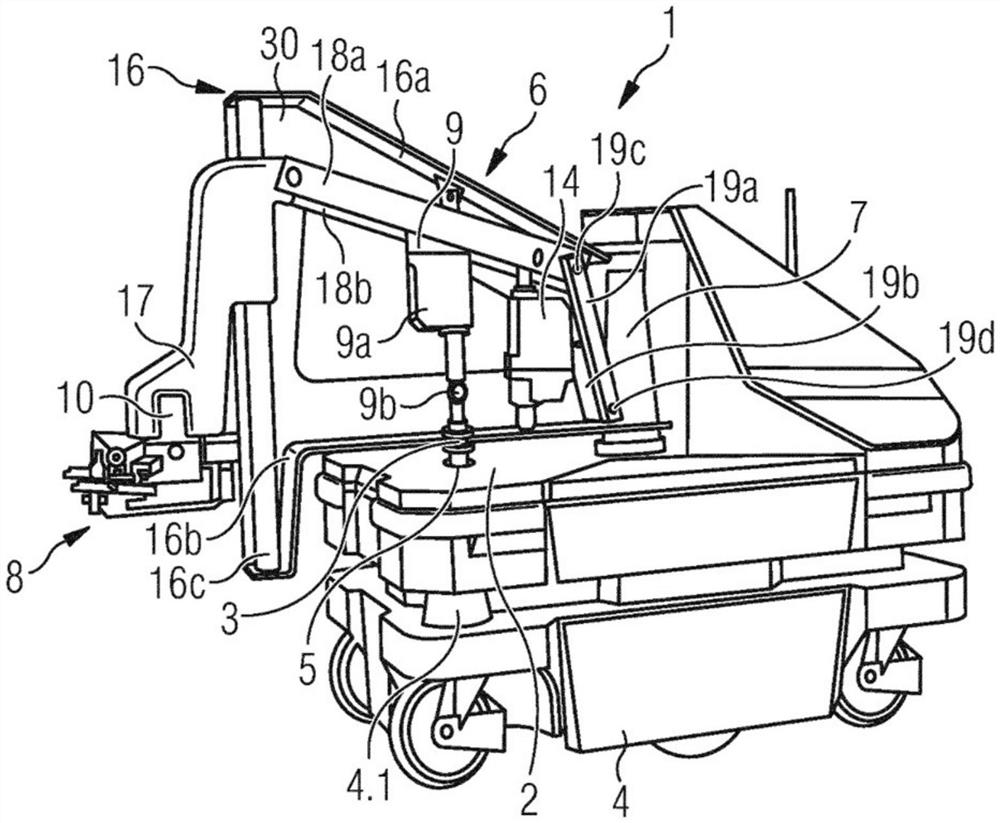
图1示出了安装在AGV上的根据本发明的夹持系统。
图2示出了根据本发明的夹持系统的端部执行器。
图3示出了根据本发明的夹持系统的端部执行器,该端部执行器夹持推车框架的元件。
下文将参考附图描述本发明的优选的实施方案。每个图包含相同或等效元件的相同编号。
具体实施方式
展示了许多具体细节以提供对本发明实施方案的完整和全面描述。然而,本领域技术人员将理解,实施方案示例不限制可以在没有这些特定指令的情况下实施的本发明的应用。为了避免任何误导,未针对实施方案详细描述众所周知的方法、程序和部件。此外,此描述不应将本发明限制于给定的实施方案示例,而仅被认为是本发明的可能具体实施之一。
图1示出了AGV的夹持系统1。夹持系统1包括基座2、臂6和具有传感器23、22a、22b的端部执行器8。
基座2包括用于将基座2附接至AGV的装置(例如螺栓孔)、用于将夹持系统连接至AGV以使得AGV能够控制夹持系统的电气接口(未示出)。基座2可以包括部分5(例如凹槽或开口),用于与夹持系统臂6的固定装置9相互作用,以便在需要固定位置时将臂6固定在固定位置。基座2还包括用于将臂6附接到基座2的装置7(例如立轴)。臂的附接装置7被构造成接收臂6,以使臂6能够至少部分地围绕附接点的竖直轴线旋转,即相对于AGV的本体4偏转。
臂6还包括框架16。框架16在一端部处附接至用于将臂6附接至基座2的装置7。框架16的相对端部具有附接到其上的端部执行器8。框架16可包括上框架元件16a和下框架元件16b。上框架元件16a和/或下框架元件16b在一端部处附接到用于将臂6附接到基座2的装置7,并且在相对端部处附接到滑动杆16c。框架16优选是刚性的。臂6还包括致动器14,致动器14适于调节升降杆18a、18b相对于水平面的角度,从而调节滑动元件17的高度以及端部执行器8的高度。臂致动器14在一端部处固定到下框架元件16b且在另一端部处固定到升降杆18a或一组升降杆18a、18b。升降杆18a、18b中的每个升降杆的一端部在附接点19c处枢转地附接到各支撑杆19a、19b的第一端部。支撑杆19a、19b中的每个支撑杆的第二端部在附接点19d处枢转地附接到下框架元件16b。升降杆18a、18b在各自的第二端部处枢转地附接到滑动元件17。当臂6的致动器14作用在升降杆18a、18b上时,滑动元件17沿滑动杆16c上下滑动。滑动元件17经由枢转连接件10连接到端部执行器8。枢转连接件10允许端部执行器8相对于AGV的基座2和本体4部分地滚动。
臂6包括固定装置9,用于将臂6相对于AGV的本体4锁定在侧向静止且稳定的位置。锁定装置9可以是任何可电控机构。固定装置9优选地包括锁定致动器9a和销9b,当被致动时,销9b从臂6的框架16朝向夹持系统的基座2突出并且进入基座2和/或AGV的框架中的开口5。致动器9a优选地在第一端部处固定至上框架元件16a并且在第二端部处固定至下框架元件16b,并且优选地位于升降杆18a、18b之间。在优选实施方案中,通过将销9b插入到下框架元件16b中的开口3中,致动器9a经由销9b固定到下框架元件16b。当臂6没有被锁定装置锁定时,销9b在缩回位置保持插入开口3中。在臂6的锁定期间,致动器9a使销9b延伸穿过开口3,并且进一步进入基座2和/或AGV的框架中的开口5。当锁定时,臂6平行于AGV的本体4的中心线。在臂6的解锁期间,致动器9a使销9b从基座2和/或AGV的框架中的开口5缩回。
臂6还可以在臂6的两侧包括保护罩30。
端部执行器8经由枢转连接件10连接到滑动元件17,以便在枢转连接件10处进行基本上自由的枢转运动。通过在滑动杆16c上滑动滑动元件17来调节端部执行器8相对于滑动杆16c的竖直位置。端部执行器8还包括钩11,用于夹持推车框架的一部分并且附接到细长元件11.1的一端部。细长元件11.1能够通过致动装置12(诸如线性致动器)线性移动,使得推车框架的一部分在被钩住时被固定在钩11与端部执行器8的前端面21之间。钩11的致动装置12优选地包括驱动部件12.1和引导部件12.2,用于容纳、移动和引导用于移动钩11的细长元件11.1。引导部件12.2优选地设置在端部执行器8的框架15的底部内侧。驱动部件12.1(诸如用于驱动致动器的马达)优选地定位在滑动构件17附近并且相对于引导部件12.2向上。钩11还包括传感器激活元件11a。传感器激活元件11a激活基本上定位在端部执行器8的前端面21上、大致与钩11相对的传感器23。每当钩11被钩致动装置12移动到完全关闭位置时,传感器11a被激活。这确保了当没有推车或其它元件意外地附接到钩11时,AGV的控制系统接收钩11已经移动到完全关闭位置的信息。因此,AGV能够安全地切换为无推车运行模式。两个支撑支架13a、13b横向地定位在前端面21并分别在钩11的右侧和左侧。支撑支架13a、13b与钩11一起提供抵靠推车的连接部件的夹紧力。端部执行器8还设置有定位在端部执行器8的框架15中的侧传感器22a、22b。侧传感器22a、22b优选为压力传感器。侧传感器22a、22b中的每个侧传感器定位在相应的支架13a、13b与钩11的线性运动的中心线之间。侧传感器22a、22b中的每个侧传感器由相应的传感器臂20a、20b激活,这些传感器臂枢转地附接在端部执行器8的框架15下方,并且定位在相应的支架13a、13b与钩11的线性运动的中心线之间。每个传感器臂20a、20b的第一端部20a.1、20b.1从端部执行器8的前端面21突出,使得当端部执行器8开始夹持推车的连接部件时,当端部执行器8向上提升抵靠推车的连接部件时,每个传感器臂20a、20b被推车的连接部件向下按压。每个传感器臂20a、20b的枢转运动提升相应传感器臂20a、20b的第二端部20a.2、20b.2,从而激活相应压力传感器22a、22b。当端部执行器8完全从推车的连接部件脱离时,端部执行器传感器23、22a、22b中的每个传感器的激活元件11a、20a、20b从传感器23、22a、22b脱离,因此指示端部执行器8从推车框架脱离。
在端部执行器8与推车框架接合期间,端部执行器8被提升抵靠推车的推车连接部件。如果支架13a、13b的平面不同于推车的连接部件的平面,则两个传感器臂20a、20b中的一个传感器臂首先压靠推车的连接部件。这使得端部执行器8围绕其在枢转连接件10处的枢转点枢转,并且由此与推车的框架的连接部件的平面对准,直到两个传感器臂20a、20b都与推车的框架的连接部件接触并且最终侧传感器22a、22b两者均被激活。两个侧传感器22a、22b适于向AGV的控制系统发送信号,并且控制单元适于在侧传感器22a、22b两者均被激活时停止端部执行器8的进一步提升。
当端部执行器8和推车的框架的连接部件对准时,控制系统向钩11的致动装置12发送信号,以将钩11移动到关闭位置,从而将推车的连接部件压靠支架13a、13b。
当处于附接有推车的操作模式时,AGV和/或推车可在不平坦表面上行驶并相对于彼此滚动。如果推车的框架和夹持系统之间的连接在所有方向上都是刚性的,则钩/支架和推车的连接部件之间将存在扭转的风险,并且因此存在丢失推车和/或损坏钩/支架和/或推车的连接部件的风险。
另一方面,如果夹持系统和推车的框架之间的连接在所有方向上都是柔性的(例如,球头联接),则推车的精确转向的能力就会丧失。
在端部执行器8在枢转连接件10处枢转地连接到滑动元件17的情况下,推车和AGV的本体4能够相对于彼此部分地滚动,而不会扭曲或挤压它们之间的机械连接件。
当推车附接到夹持系统1时,臂6优选地相对于AGV处于其中心位置。AGV的控制系统借助于照相机/传感器来识别推车,并且已经存储了关于所识别的推车的连接部件/框架的高度和位置的信息。控制系统调节端部执行器8的高度,使得钩11处于足够低的高度以使钩11在推车框架/附接部件下方通过。AGV将其自身驱动至推车前方的位置,使得端部执行器8靠近框架/附接部件。钩11被向外驱动。端部执行器8被提升并且钩11被向内驱动直到它与支架13a、13b一起在推车框架上提供夹持力。
这种结构确保了可以在夹持部分的不同高度处传递基本上相同的拉力,从而可以拉动不同类型的推车。此外,AGV倾翻的风险被最小化。
本发明的另一个方面是提供一种具有上述夹持系统1的AGV。使用根据本发明第一方面的夹持系统1来牵引或推动轮式推车的AGV包括驱动轮、安装在所述驱动轮上的机器人本体4、利用导航系统的控制系统。AGV还包括安装在机器人本体4上的接近传感器4.1、4.2,用于围绕机器人本体4进行270度观察。一个接近传感器4.1位于机器人本体4的后部的角落中。另一个接近传感器4.2位于机器人本体4的前部的角落。后部是推车附接的部分,前部在机器人本体4的相反侧上。控制系统联接到接近传感器4.1、4.2,用于调整计算出的机器人位置并且用于检测任何障碍物。
在本发明的特别优选的实施方案中,导航系统包括自动控制和引导系统,用于到达给定目标地并且同时避免与周围环境碰撞。
在本公开全文中,AGV代表自动导引车辆。
尽管已在本发明的本说明书中列出了许多特性和优点以及结构细节和特征,但是说明书以本发明的示例实现方式被提供。在不脱离本发明的原理的情况下,根据权利要求中使用的概念和定义的最广泛理解的含义,可以改变细节尤其是形式、尺寸和布局。
- 一种用于清洗周转筐的洗箱机自动夹持系统
- 自动导引车辆控制系统及自动导引车辆控制方法
- 自动驾驶系统及用于操作自动导引车辆的方法