一种边缘计算系统能量与任务调度的优化方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及物联网领域,具体为一种边缘计算系统能量与任务调度的优化方法。
背景技术
随着物联网的快速普及,越来越多的IoT智能传感器节点需执行对时延敏感的计算密集型任务。然而,由于计算资源有限,因此要在这些节点上本地完成这些计算任务,往往不切实际或需付出昂贵的代价。作为IoT的新兴技术之一,移动边缘计算可以使IoT节点把其计算任务卸载到具有足够计算资源的服务器上执行,有望成为解决上述问题的有效方案。在IoT上部署MEC,不仅可减少任务执行时延,还可为IoT节点节省能耗。因此,如何设计良好性能的MEC系统近年来引起了学者们的极大兴趣。
智能反射面是近年提出的一种可实现高频谱效率无线通信系统的经济高效技术。在部署IRS的无线通信系统中,在IRS上调整无源元件反射信号的相移,可提高无线接收机的接收信号功率。在MEC系统中,通过结合IRS技术,可以使任务卸载更高效,从而获得更好的系统性能。因此,如何设计IRS辅助的MEC系统,成为了近年来引起学者们浓厚研究兴趣的课题。
文献1[T.Bai,C.Pan,Y.Deng,M.Elkashlan,A.Nallanathan and L.Hanzo,"Latency Minimization for Intelligent Reflecting Surface Aided Mobile EdgeComputing,"IEEE Journal on Selected Areas in Communications,vol.38,no.11,pp.2666-2682,Nov.2020]研究了在MEC系统中部署IRS的好处,其中多个设备通过IRS将任务卸载到边缘计算节点,目标是在边缘计算能力约束和IRS相移约束下最小化延迟。
在大部分已有研究中,均假设IRS由电池或电网供电,从而可通过控制器调整无源元件的相移。然而,更换电池或对电池充电的代价通常昂贵而且不方便,在环境恶劣或特殊的应用场景甚至无法实现,因此使用电池供电的IRS工作寿命容易受到电池容量的限制。如果采用固定电源供电,IRS只能被部署在可接入固定电网的位置,将会导致IRS在许多没有电网接入的场合下无法使用。无线射频能量采集是一种可以使配备射频能量收集电路的无线节点能够从RF信号中采集能量来延长其工作寿命的新技术,因此结合射频能量收集技术的无线供能IRS辅助无线通信系统在最近受到了学者们的广泛关注。
文献2[S.Xu,Y.Du,J.Liu and J.Li,“Intelligent reflecting surface basedbackscatter communication for data offloading,”IEEE Trans.Commun.,to bepublished,doi:10.1109/TCOMM.2022.3170629.]研假设IRS连接至用户终端,并帮助用户终端将任务数据卸载到多个MEC服务器以进行协作计算,IRS工作和用户本地计算所消耗的能量均从电源信标发出的RF信号中获取。
文献3[S.Mao,N.Zhang,L.Liu,J.Wu,M.Dong,K.Ota,T.Lui,and D.Wu,“Computation rate maximization for intelligent reflecting surface enhancedwireless powered mobile edge computing networks,”IEEE Trans.V eh.Technol.,vol.70,no.10,pp.10820-10831,Oct.2021.]假设IRS和所有用户终端均由从基站发射的RF信号中收集的能量供电,IRS使用收集的能量协助用户终端将任务数据卸载到基站。
现有技术问题:在已有研究中,如文献[2-3],为简化分析,均假设一个时隙开始时用户端产生的计算任务必须在当前时隙完成,而且能量调度采用了大部分无线供能系统采用的收集-使用策略,即IRS在一个时隙收集到的能量必须在当前时隙全部使用完。然而,HTU方法无法在一个有限的时间范围内增加收获的能量数量且无法在IRS端有效利用收获的能量。
基于上述分析,需研究与文献[2-3]不同的设计方案,以增加IRS收集的能量,并高效地利用收集的能量,从而提高系统性能。为此,首先提出一种新的能量与任务调度协议,以使MEC系统可根据信道条件、IRS电池的能量状态和用户任务队列状态,自适应地在三种模式(即能量收集模式、IRS辅助任务卸载模式和IRS待机任务卸载模式)进行切换。在能量收集模式下,IRS可累积收集的能量,这些能量将在后续时隙中使用;在IRS辅助任务卸载模式下,用户端在IRS辅助下卸载任务数据至HAP;在IRS待机任务卸载模式下,IRS处于待机状态(即不再使用能量),用户端仅通过直达链路卸载任务数据至HAP。
由于无线信道和任务到达的随机性,而且各个时隙的系统工作模式和资源分配决策相互关联,因此建立的问题是一个多阶段序列决策的随机优化问题,很难直接求解,为此我们提出了一种边缘计算系统能量与任务调度的优化方法。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种边缘计算系统能量与任务调度的优化方法,解决了上述的问题。
(二)技术方案
为实现上述所述目的,本发明提供如下技术方案:一种边缘计算系统能量与任务调度的优化方法,包括以下步骤:
第一步:基于新的能量与任务调度协议,以使MEC系统可根据信道条件、IRS电池的能量状态和用户任务队列状态,自适应地在能量收集模式、IRS辅助任务卸载模式和IRS待机任务卸载模式进行切换;
第二步:基于所开发的协议,对系统优化问题进行建模,在最小化用户长期的任务卸载和计算能耗;
第三步:利用李雅普诺夫优化方法,把其分解为基于时隙的确定性优化问题,并通过凸优化理论对相应的确定性优化问题进行求解。
优选的,所述第一步中的具体步骤如下:
S1:建立信道模型;
以MEC系统中的信道为准静态信道;
用户端可以通过UA链路和URA链路把计算任务数据卸载到HAP;
UA链路,时隙k中的信道系数表示为h
URA链路,包括用户端至IRS(UR,user-to-IRS)和和IRS至HAP(RA,IRS-to-HAP)两个信道链路,时隙k中信道系数向量统一表示为
设
S2:无线供电IRS辅助任务卸载协议;
新协议下的MEC系统可按能量收集模式、IRS辅助任务卸载模式和IRS待机任务卸载模式运行,其中t
在时隙
优选的,所述能量收集模式中,一个时隙中的所有时间都用于IRS的能量收集,在此情况下,HAP向IRS发射RF能量信号,IRS从这些RF能量信号中收集能量,在此模式下,用户端不卸载计算任务数据至HAP,仅依靠自身在本地执行计算任务;
在IRS辅助任务卸载模式中,将一个时隙分为两个阶段,在第一阶段,IRS进行能量收集;在第二阶段,用户端在IRS的辅助下,向HAP卸载计算任务数据,作为其中一个特例,在此模式下,当IRS初始能量足够时,第一阶段可以不存在,此时IRS在整个时隙都将辅助用户端卸载计算任务数据至HAP,即有t
在IRS待机任务卸载模式中,用户仅通过UA链路将计算任务数据卸载至HAP,IRS处于电源关闭的待机状态,此模式在以下两种情形会被选择:其一,IRS电池能量不足时,IRS无法参与辅助任务卸载,其二,当前时隙的UA链路信道质量很好时,用户可直接通过UA链路卸载计算任务至HAP。
优选的,所述第二步的具体步骤如下:
S1:用户的能耗模型,模型包括任务卸载的能耗以及任务本地计算的能耗;
S2:IRS的能量收集与消耗模型;
IRS在能量收集模式以及IRS辅助任务卸载模式下,从HAP发射的RF能量信号中收集能量,IRS在时隙k中收集到的能量可以表示为
在IRS辅助任务卸载模式下,可得IRS在时隙k中消耗的能量为E
优选的,任务卸载的能耗包括:
在IRS辅助任务卸载模式下运行时,最大可达数据传输速率为:
B是系统的带宽,p(k)是用户端的发射功率,σ
用户端执行任务卸载的能耗为:
IRS待机任务卸载模式下运行时,用户端卸载d(k)任务数据量所消耗的能量为;
S3:问题建模,用户端在处理计算任务时,可以在一个时间段内对任务队列中的计算任务量进行调度。在时隙k开始时,把用户任务队列状态表示为Q(k),在时隙k结束或等效的时间瞬间(k+1)
优选的,所述第三步的具体步骤如下:
S1:基于IRS电池的能量状态B(k)定义一个虚拟能量状态:
X(k)=B(k)-G;
S2:其中G=2TNμ是一个与时间无关的常数,描述为:
X(k+1)=X(k)+E
S3:定义二次李雅普诺夫函数为:
S4:引入李雅普诺夫漂移函数Δ(Ω(k)):
S5:进一步定义由李雅普诺夫漂移函数和确定性优化问题的目标函数加权得到的李雅普诺夫漂移惩罚函数:
其中λ是一个非负加权因子;
S6:定理李雅普诺夫漂移惩罚函数的上界:
M是一个独立于λ的有限常数;
S7:把优化目标由问题的目标函数改写为李雅普诺夫漂移惩罚函数,利用漂移惩罚函数的上界,可以把原问题转换为求解该上界的最小值的问题:
φ
d(k)≥0,l(k)≥0,T≥τ(k)≥0;
S8:基于问题求解与系统优化算法,确定最优系统工作模式,从而得到最小值的问题的最优解;
当φ
s.t.l(k)≥0;
目标函数为O(k),对方程
当φ
d(k)≥0,l(k)≥0,T≥τ(k)≥0;
S9:由于
其中
在得到l
s.t.d(k)≥0,T≥τ(k)≥0;
S10,求解上述问题,得到最优解后,即可确定Y
优选的,所述系统优化算法包括以下步骤:
S1:初始化:k=1;
S2:while TRUE;
S3:获得第k个时隙的系统信道状态信息CSI,读取IRS电池的能量状态信息B(k)、用户任务队列状态信息Q(k);
S4:求解三个模式所对应的优化问题,得到d(k)、l(k)、t(k)和Θ(k)的最优解,并计算Y
S5:确定系统工作模式m
S6:根据m
S7:k=k+1;
S8:end while。
(三)有益效果
与现有技术相比,本发明提供了一种边缘计算系统能量与任务调度的优化方法,具备以下有益效果:
1、该边缘计算系统能量与任务调度的优化方法,与四种基准方案相比,本文提出方案的能耗最低,具体而言,与短视方案相比,本文提出方案的系统能耗仅为其能耗的10%-50%,而与本地计算方案和仅HAP计算方案相比,节省的能耗更多,因此,使用本文提出的新协议和系统优化算法,可明显地节省用户端的能耗。
2、该边缘计算系统能量与任务调度的优化方法,当路径损耗指数从2.5增加至5时,无IRS协助方案的能耗增加了约22倍,而本文提出方案的能耗仅增加约2倍,从而进一步验证了在系统中部署IRS可以明显地节省用户端的能耗。同时,对于仅HAP计算方案,路径损耗指数从2.5增加至5时,消耗的能量增加了约6倍,从而验证了使用部分卸载方式可节省用户端能耗。此外,对于所有的UA链路路径损耗指数,本文提出方案的能耗性能也显著优于短视方案,因此也进一步验证了使用本文提出的新协议和优化算法可获得比文献[2-3]的能量和任务调度方式更好的能耗性能。
附图说明
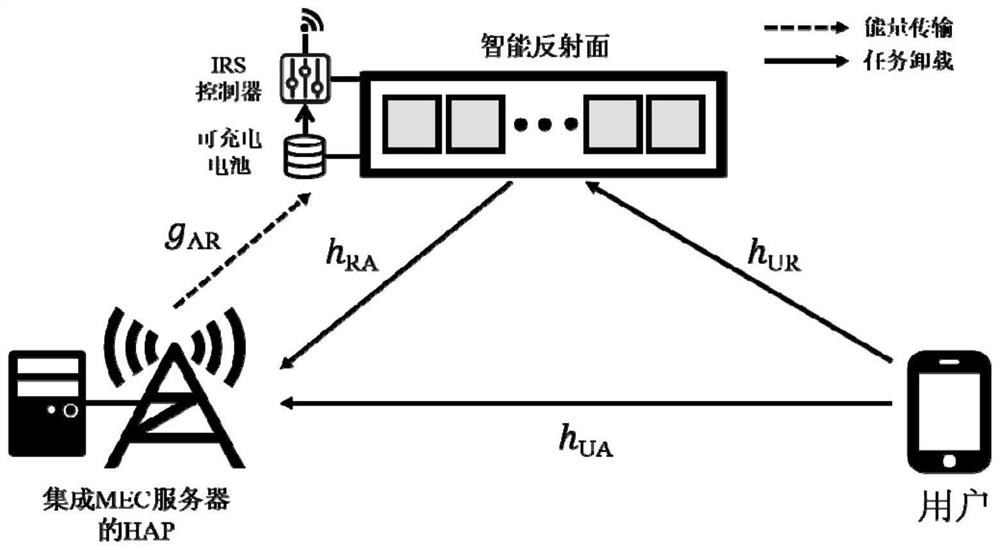
图1为无线供能IRS辅助MEC系统示意图;
图2为提出的任务卸载协议中三种系统运行模式示意图;
图3为HAP发射功率变化时各方案的能耗性能比较示意图;
图4为UA链路信道质量变化时不同方案能耗性能比较示意图;
图5为系统优化算法流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
考虑在图1所示的无线供能IRS辅助MEC系统中,需执行的计算任务随机地到达用户端,且由于用户端自身计算能力有限,需把部分计算任务卸载至HAP进行协同计算。同时,假设用户端与HAP之间存在障碍物,因此用户端至HAP(UA,user-to-HAP)的信道链路质量较差,需在两者之间部署IRS,以提高用户端卸载计算任务的性能。换言之,HAP可以同时通过UA链路和URA(user→IRS→HAP)链路接收来自用户端的任务数据。本文假设IRS由一个具有N个反射元件的均匀线阵(ULA,uniform linear array)、一个可调节每个反射元件相移的控制器、一个射频能量收集电路和一个可充电电池组成。其中,IRS通过射频能量收集电路收集从HAP发出的射频信号能量,把其存储在可充电电池中,然后使用这些存储的能量进行信号反射操作。此外,由于用户端的发射功率通常远低于HAP的发射功率,因此本文忽略了IRS从用户端发射的信号中获取的能量。
在所考虑的MEC系统中,假设用户的任务到达和执行模型如下描述。假设系统基于时隙进行运作,而且考虑长度为K*T的时间段,其中K为时隙个数,T为每个时隙的长度。在每个时隙
一种边缘计算系统能量与任务调度的优化方法,包括以下步骤:
S1、在本文研究的无线供能IRS辅助MEC系统中,以增加IRS收集的能量并高效地利用收集的能量,从而提高系统性能为目的,提出一种新的能量与任务调度协议,以使MEC系统可根据信道条件、IRS电池的能量状态和用户任务队列状态,自适应地在三种模式(即能量收集模式、IRS辅助任务卸载模式和IRS待机任务卸载模式)进行切换。
具体的,所述步骤S1包括以下步骤:
S11、信道模型
本文假设MEC系统中的信道为准静态信道,即在单个时隙内不变,但可以在不同的时隙中独立变化。而且,从用户端到HAP的每一次任务卸载是在单独一个时隙内完成的。也就是说,在每个时隙开始时,用户端将决定是否以及如何将其计算任务数据卸载至HAP。
如上一小节所述,用户端可以通过UA链路和URA链路把计算任务数据卸载到HAP。对于UA链路,将时隙k中的信道系数表示为h
此外,设
在实际应用中,IRS的相移通常是离散值。然而,为简化分析,本文采用目前大部分IRS相关研究的假设,即假设IRS的反射相移是连续的。
因为URA链路由UR链路、IRS反射相移和RA链路串联得到,所以在时隙k,URA链路的信道系数可以表示为
如前所述,IRS使用从HAP发射的RF信号收集的能量。考虑到硬件实现可行性和成本因素,本文假设IRS使用独立于反射元件的单天线进行能量收集。在时隙k,HAP至IRS(AR,HAP-to-IRS)的链路信道系数表示为g
S12、无线供电IRS辅助任务卸载协议
为效地利用无线信道的时变性进行能量收集以及高效地使用收集的能量,本文为无线供能IRS辅助MEC系统提出了一种新的任务卸载协议。在文献[2-3]中,IRS必须在每个时隙结束时使用完所有可用能量,而且用户端产生的计算任务必须在一个时隙内完成。与之不同,本文提出的新协议可以使IRS根据系统链路的信道质量、IRS电池的能量状态和用户任务队列状态自适应地进行能量和任务调度。具体而言,新协议下的MEC系统可按图2所示的三种模式(即能量收集模式、IRS辅助任务卸载模式和IRS待机任务卸载模式)运行,其中t
在模式I中,一个时隙中的所有时间都用于IRS的能量收集。在此情况下,HAP向IRS发射RF能量信号,IRS从这些RF能量信号中收集能量。同时,在此模式下,用户端不卸载计算任务数据至HAP,仅依靠自身在本地执行计算任务。
在模式II中,将一个时隙分为两个阶段。在第一阶段,IRS进行能量收集;在第二阶段,用户端在IRS的辅助下,向HAP卸载计算任务数据。作为其中一个特例,在此模式下,当IRS初始能量足够时,第一阶段可以不存在;此时IRS在整个时隙都将辅助用户端卸载计算任务数据至HAP,即有t
在模式III中,用户仅通过UA链路将计算任务数据卸载至HAP,IRS处于电源关闭的待机状态。此模式在以下两种情形会被选择:其一,IRS电池能量不足时,IRS无法参与辅助任务卸载;其二,当前时隙的UA链路信道质量很好时,用户可直接通过UA链路卸载计算任务至HAP,从而节省IRS的能量,以便在后续时隙中使用。
记上述三种MEC系统工作模式的集合为
根据图2,当MEC系统工作于模式I时,t
φ
一般而言,用户端通过MEC服务器执行计算任务需依次经过任务卸载、远程执行和结果下载三个阶段。由于任务远程执行和结果下载时间通常远小于任务卸载的时间,因此本文将忽略任务远程执行和结果下载两个阶段,重点关注任务卸载的第一阶段。对于许多计算密集型物联网应用(例如,图像/视频/语音识别、文件扫描、数据分析、多传感器信息处理等),由于部署在HAP的MEC服务器通常比用户端拥有更加丰富的计算资源,而计算结果数据量通常远少于任务输入数据量,因此这个假设是合理的。
S2、基于所开发的协议,对系统优化问题进行了建模,旨在最小化用户长期的任务卸载和计算能耗;
具体的,所述步骤S2包括以下步骤:
S21、用户的能耗模型
1)任务卸载的能耗:根据上一小节中描述的相关协议,当MEC系统在模式II下运行时,用户端可以通过UA和URA链路将任务数据卸载到HAP。其中,最大可达数据传输速率为
其中,B是系统的带宽,p(k)是用户端的发射功率,σ
当MEC系统在模式III下运行时,用户仅通过UA链路将任务数据卸载到HAP。因此,类似于(4)的推导,可得模式III中用户端卸载d(k)任务数据量所消耗的能量为
2)任务本地计算的能耗:令C≥0为用户端执行一个计算任务比特所需的中央处理器(CPU,central processing unit)周期数,其通常取决于计算任务的类型和用户端的CPU体系架构。此外,把用户端在时隙k中进行本地计算的任务输入比特表示为l(k)。可以证明,为节省能耗,用户端应采用动态电压和频率缩放技术,以恒定的CPU频率Cl(k)/T在时隙k中执行本地计算。因此,在时隙k,用户端执行本地计算的能耗可以表示为
其中ζ>0表示有效开关电容系数,其取决于用户端的CPU芯片架构。
基于上述分析,用户端在时隙k中的总能耗可以表示为
S22、IRS的能量收集与消耗模型
如图2所示,IRS在模式I和模式II下,从HAP发射的RF能量信号中收集能量。令η∈(0,1)表示能量收集效率,P
此外,在模式II下,IRS在辅助用户将计算任务数据信号反射到HAP的过程中,需要消耗能量。通常,IRS的功耗随IRS的尺寸线性增加,且取决于单个反射元件的相位分辨率。令μ表示单个反射元件的功耗,它与相位分辨率有关。由此,可得IRS在时隙k中消耗的能量为E
S23、问题建模
如前所述,用户端在处理计算任务时,可以在一个时间段内对任务队列中的计算任务量进行调度。在时隙k开始时(记为时间瞬间k
Q(k+1)=max{Q(k)+A(k)-D(k),0} (8)
同时,稳定性是表征用户的任务队列缓冲区的一个重要指标,它表示平均任务执行量不应超过时间平均任务到达率,即
与Q(k)相似,把时隙k开始时IRS电池的能量状态表示为B(k)≥0。根据前述的任务卸载协议,在时隙k结束时,IRS的电池中可能会剩余部分能量,以便在下一时隙(k+1)使用。因此,把时隙k结束时(即时间瞬间(k+1)
B(k+1)=B(k)+E
同时,长期时间范围内IRS消耗的平均能量不应多于其收集到的平均能量,即
对于图1所示的无线供能IRS辅助MEC系统,本文的目标是通过优化每个时隙的系统工作模式、用户的任务调度、模式II中的IRS反射相移和时间分配(即Ψ(k)={Φ(k),d(k),l(k),t(k),Θ(k)},其中Φ(k)={φ
C
+φ
C
在问题(12)中,由于各个时隙的无线信道和到达的任务量是随机的,因此在时隙k,无法确定后续时隙(即时隙k+1、k+2、……)的信道状态信息和任务状态信息。因此,问题(12)是一个经典的随机优化问题,很难直接求解。为解决此问题,本文基于李雅普诺夫优化方法,把其分解为一系列时隙之间相互独立的确定性优化问题,并通过凸优化理论对相应的确定性优化问题进行求解,从而提出一种低复杂度的高效算法。
S3、利用李雅普诺夫(Lyapunov)优化方法,把其分解为基于时隙的确定性优化问题,并通过凸优化理论对相应的确定性优化问题进行求解,提出了一种低复杂度的高效在线算法。
具体的,所述步骤S3包括以下步骤:
S31、问题转化
为了使用李雅普诺夫优化方法求解问题(12),首先基于IRS电池的能量状态B(k)定义一个虚拟能量状态:
X(k)=B(k)-G (13)
其中G=2TNμ是一个与时间无关的常数。由式(13)可见,虽然B(k)≥0,但X(k)可取负值。根据式(10),X(k)的状态变化可以描述为
X(k+1)=X(k)+E
在文献中,已经证明保证队列X(k)的稳定性与满足问题(12)中的长期平均能量调度约束C4等价。
基于Q(k)和X(k),令Ω(k)=[Q(k),X(k)]为一个广义队列。由此,可定义二次李雅普诺夫函数为
其中,v是一个非负常数,起作用是使得Q(k)和X(k)的值数量级相同。进一步地,为保证广义队列Ω(k)的稳定性,引入李雅普诺夫漂移函数Δ(Ω(k)):
其反映了从时隙k到时隙(k+1)广义队列Ω(k)的变化量。
基于李雅普诺夫优化理论,可进一步定义由李雅普诺夫漂移函数和问题(12)的目标函数加权得到的李雅普诺夫漂移惩罚函数,即
其中λ是一个非负加权因子。
为进一步简化优化问题,以下定理给出了李雅普诺夫漂移惩罚函数的上界。
对于每个时隙李雅普诺夫漂移惩罚函数的上界,可由以下表达式确定。
其中,M是一个独立于λ的有限常数,可以写成
根据李雅普诺夫优化方法,可把优化目标由问题(12)的目标函数改写为李雅普诺夫漂移惩罚函数,从而在保证系统队列稳定性的同时,最小化系统能耗。进一步地,利用式(18)中漂移惩罚函数的上界,可以把原问题转换为求解该上界的最小值的问题,即
φ
d(k)≥0,l(k)≥0,T≥τ(k)≥0 (20)
与问题(12)需求解多个时隙的优化变量相比,问题(20)仅涉及一个时隙(即第k时隙)的优化变量求解,因此该问题是一个相对容易处理的问题。
S32、问题求解与系统优化算法
为求解问题(20),注意到优化变量系统工作模式指示子φ(k)是二元优化变量,但由于系统工作模式只有三种,因此可通过分别求解三种系统工作模式下对应的优化问题,然后确定最优系统工作模式,从而得到问题(20)的最优解。
当φ
s.t.l(k)≥0 (21)
记问题(21)目标函数为O(k)。对方程
当φ
d(k)≥0,l(k)≥0,T≥τ(k)≥0 (23)
与求解式(22)中l(k)最优解的方法类似,可得问题(23)中l(k)最优解。进一步地,注意到优化变量Θ(k)的最优解可以通过最大化
其中
在得到l
s.t.d(k)≥0,T≥τ(k)≥0 (25)
为了求解问题(25),分以下两种情形讨论:
①当X(k)≥0时,可以推导得到优化变量τ(k)的最优解为
τ
基于式(26),可得优化变量d(k)的最优解为
②当X(k)<0时,引入一个松弛变量
s.t.d(k)≥0,T≥τ(k)≥0
d(k)log(2)≤-τ(k)Blog
可以证明,问题(28)为凸问题。因此,可通过内点法得到该问题的最优解。
当φ
s.t.d(k)≥0,l(k)≥0 (29)
与求解式(22)和(25)中l(k)和d(k)最优解的方法类似,可得问题(29)中l(k)和d(k)最优解。
在求得问题(21)、(23)和(29)的最优解后,即可确定Y
综上,可得系统优化算法如算法1所示。
基于李雅普诺夫优化理论的系统优化算法,包括以下步骤:
1)初始化:k=1;
2)while TRUE;
3)获得第k个时隙的系统信道状态信息CSI,读取IRS电池的能量状态信息B(k)、用户任务队列状态信息Q(k);
4)求解三个模式所对应的优化问题(21)、(23)和(30),得到d(k)、l(k)、t(k)和Θ(k)的最优解,并计算Y
5)确定系统工作模式m
6)根据m
7)k=k+1;
8)end while。
图3画出了当HAP的发射功率(即P
图4画出了UA链路的信道质量对不同方案的能耗性能的影响。从图4可以看出,对于本文提出的方案、无IRS协助方案、短时方案和仅HAP计算方案,由于均采用了任务卸载,因此其能耗都随着UA链路路径损耗指数的增加而增加。特别地,当路径损耗指数从2.5增加至5时,无IRS协助方案的能耗增加了约22倍,而本文提出方案的能耗仅增加约2倍,从而进一步验证了在系统中部署IRS可以明显地节省用户端的能耗。同时,对于仅HAP计算方案,路径损耗指数从2.5增加至5时,消耗的能量增加了约6倍,从而验证了使用部分卸载方式可节省用户端能耗。此外,对于所有的UA链路路径损耗指数,本文提出方案的能耗性能也显著优于短视方案,因此也进一步验证了使用本文提出的新协议和优化算法可获得比文献[2-3]的能量和任务调度方式更好的能耗性能。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 联合能量和延迟优化的移动边缘计算任务调度方法
- 联合能量和延迟优化的移动边缘计算任务调度方法