一种线控底盘执行器的冗余系统、方法、存储介质及设备
文献发布时间:2023-06-19 19:14:59
技术领域
本发明涉及一种线控底盘执行器的冗余系统、方法、存储介质及设备。
背景技术
汽车线控底盘主要由线控转向、线控制动、线控换挡、线控油门以及线控悬挂五大系统组成,线控底盘是是实现自动驾驶以及无人驾驶的关键载体,是实现动力学控制体现汽车动感驾乘体验的基础平台。百年的汽车发展历史铸就了安全可靠定型化的机电液复杂结构,然而必不可少的仍然是依靠汽车操纵动力学的控制执行器来实现稳定安全的行驶控制。
随着以电动化为首的新能源汽车的快速发展,汽车底盘智能化的进程突飞猛进,为对应自动驾驶技术以及无人车技术的需求,底盘电动化的线控技术面临巨大挑战,而且由于激烈的市场竞争,电动汽车成本压力推动了高性价比的创新性课题解决架构方案的探索与追求。
在电动化的时代,首选控制执行器必然是具备高性能精准控制功能的无刷直流永磁同步电机(PMSM),再结合减速增扭的齿轮副机械传动组成实现控制的执行机构系统,其中,无刷直流永磁同步电机的控制主要依靠半导体芯片技术支撑的磁场定向控制(FOC:Field Oriented Control)的算法实现。电机产品的电子控制单元(ECU:ElectronicControl Unit)是实现电机控制算法的硬件基础,为了避免由于电子硬件的随机故障导致电机执行器的功能失效,由此演绎创新了冗余的双控制器、双电机、双主芯片以及多相电机绕组等方案。
例如CN111564993A公布了一种双绕组直流无刷电机冗余控制系统的操作方法,其采用双主芯片控制的双绕组电机方案;CN111038578A公布了一种双源双绕组电机线控转向系统及其容错控制方法,其采用电机绕组以及电源双重硬件冗余的方案。
汽车是规模化大件民用商品,对于满足安全要求条件之下的成本控制极为苛刻,因此线控底盘执行器的创新发明需要既要满足安全法规要求又要考虑成本,而双主芯片无疑增加了系统实现的难度以及成本费用。另外,电动车的动力电池包按照国家标准要求,是具有车规级高可靠性(可提供动力驱动电机高电压以及控制器低电压)的电源系统,因此线控底盘的控制执行器供电电源采取双电源方案也是高成本系统构成方案。以上技术关联的专利以及产品已有呈现,但是在电控执行器及其冗余控制技术方案以及功能安全保障的措施方面仍然具有广阔的创新空间。
发明内容
针对上述问题,本发明提供一种线控底盘执行器的冗余系统、方法、存储介质及设备,以合理的成本实现冗余控制执行手段,可应用于但不限于新能源汽车、自动驾驶、智能物流车、智能网联车等领域。
为实现上述技术目的,达到上述技术效果,本发明通过以下技术方案实现:
一种线控底盘执行器的冗余系统,包括电源单元和电子控制单元ECU,所述电子控制单元ECU包括可控制六相双绕组永磁同步电机的微处理器MCU,所述六相双绕组永磁同步电机轴端设置有电机转子位置传感器,所述电机转子位置传感器信号输入到微处理器MCU,所述微处理器MCU通过三相预驱模块A和MOSFET桥路A控制六相双绕组永磁同步电机的一路三相绕组,所述微处理器MCU通过三相预驱模块B和MOSFET桥路B控制六相双绕组永磁同步电机的另一路三相绕组。
优选,所述电源单元包括电池和储能双层超级电容DLC。
优选,还包括电池状况检测模块BMS,所述电池状况检测模块BMS采集电池的启动电流、静态电压以及电池温度,进行电池模型以及电池参数的校验,并结合峰值电流监测以及与系统标定的负荷型谱比较,对电池的健康状况作出判断;当判断电池为非健康状况,在需要线控驱动时,微处理器MCU控制执行器的功率降级驱动,启动储能双层超级电容DLC放电,实现驱动控制功能,并发出警报信息通知车辆控制主体的驾驶员或自动驾驶系统采取车辆的安全控制操纵。
优选,当电池的健康状况不能满足线控驱动的控制需求能量时,电子控制单元ECU发出指令控制车辆驶离车道停入紧急车道并开启双闪灯,并取消相关电控的干预。
优选,电池健康状况检测具体包括:
步骤①、根据车辆实际情况设定初始条件,包括电池电压低限V1、电压高限V2、电压衰减变量的梯度值Vstp、供电时间间隔T1、判断电压衰减变量的梯度值Vstp连续循环次数Cnt2;设功能检测循环次数FC的初始值为0、电池电压采样的检测循环次数P的初始值为1且上限为Cnt1;设第P次电池电压采样值VB(P)=VB_ADC(P)且赋值VB(1)的初始值为VB_ADC(1),进入步骤②;
步骤②、赋值P的值加1、电池状况检测模块BMS进行第P次电压采样,采样值VB(P)=VB_ADC(P),进入步骤③;
步骤③、判断采样的电压值VB(P)是否属于区间[V1,V2]内,若是,则进入步骤④和步骤⑤;若否,进入步骤⑧;
步骤④、保持电池电源为ECU以及电机提供电力T1时长;
步骤⑤、电池状况检测模块BMS控制储能双层超级电容DLC保持不接入状态,进入步骤⑥;
步骤⑥、判断检测循环次数P是否大于Cnt1,若大于,则进入步骤⑦,否则,进入步骤②;
步骤⑦、复位P=1且VB(1)的值为步骤②中的采样值,然后进入步骤②;
步骤⑧、计算上次采样电压VB(P-1)与本次采样电压VB(P)的电压衰减变量Vd,进入⑨;
步骤⑨、判断电压衰减变量Vd是否大于衰减梯度值Vstp,如果否,则进入步骤
步骤⑩、FC的值加1,进入步骤
步骤
步骤
步骤
步骤
步骤
步骤
步骤
优选,所述微处理器MCU经由CAN通信模块进行通信,所述电池通过电源管理模块与微处理器MCU相连,所述电源管理模块用于MCU工作电压检测;所述微处理器MCU还与温度检测单元相连,所述温度检测单元实施参数标定后为MCU提供MOSFET桥路A和MOSFET桥路B的温度,为ECU电路进入保护状态提供判定条件。
对应的,一种线控底盘执行器的冗余方法,至少包括下述一种或组合的冗余方法:
(一)微处理器MCU通过三相预驱模块A和MOSFET桥路A控制六相双绕组永磁同步电机的一路三相绕组,所述微处理器MCU通过三相预驱模块B和MOSFET桥路B控制六相双绕组永磁同步电机的另一路三相绕组;
(二)电源单元包括电池和储能双层超级电容DLC;
(三)电池状况检测模块BMS采集电池的启动电流、静态电压以及电池温度,进行电池模型以及电池参数的校验,并结合峰值电流监测以及与系统标定的负荷型谱比较,对电池的健康状况作出判断;当判断电池为非健康状况,微处理器MCU控制执行器的功率降级驱动,电池状况检测模块BMS发送故障状况数据信息到数据CAN总线2,然后储能双层超级电容DLC由储能迁移到放电状态。
一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述所述的冗余方法。
一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述指令由所述处理器加载并执行以实现上述所述的冗余方法。
本发明的有益效果是:
第一、只用一个符合汽车功能安全的微处理器MCU芯片实现双绕组电机的两路预驱模块及MOSFET的开关控制作用,当一路预驱模块和MOSFET的开关控制出现故障失效时,另外一路预驱模块和MOSFET尚可发挥电机控制执行作用,使得线控底盘控制执行达到安全状态,也即车辆能够驶离车道并且停靠到安全地点。
第二、采用储能双层超级电容DLC(Double Layer Capacitor)储能,在意外事故(比如线束断裂,电池电源断路或短路)使得底盘域控制器断电的情况下,储能双层超级电容DLC仍然能够提供足够的电能使得:(1)电控制动执行器可以实现数次主动制动请求,为例如自动紧急制动(AEB)以及自适应巡航(ACC)的功能实现提供了冗余手段;(2)电控转向执行器可以实现一定时间的持续主动转向请求,使车辆能够驶离车道并且停靠到安全地点。
第三、采用电池状况检测模块BMS,实时进行电池健康状况监测,为底盘线控系统正常发挥功能提供预警安全保障。
第四、本发明基于一个主芯片实现冗余方案多样化,以合理的成本,为解决诸如电动汽车的新能源汽车线控底盘的冗余控制执行提供了手段。
附图说明
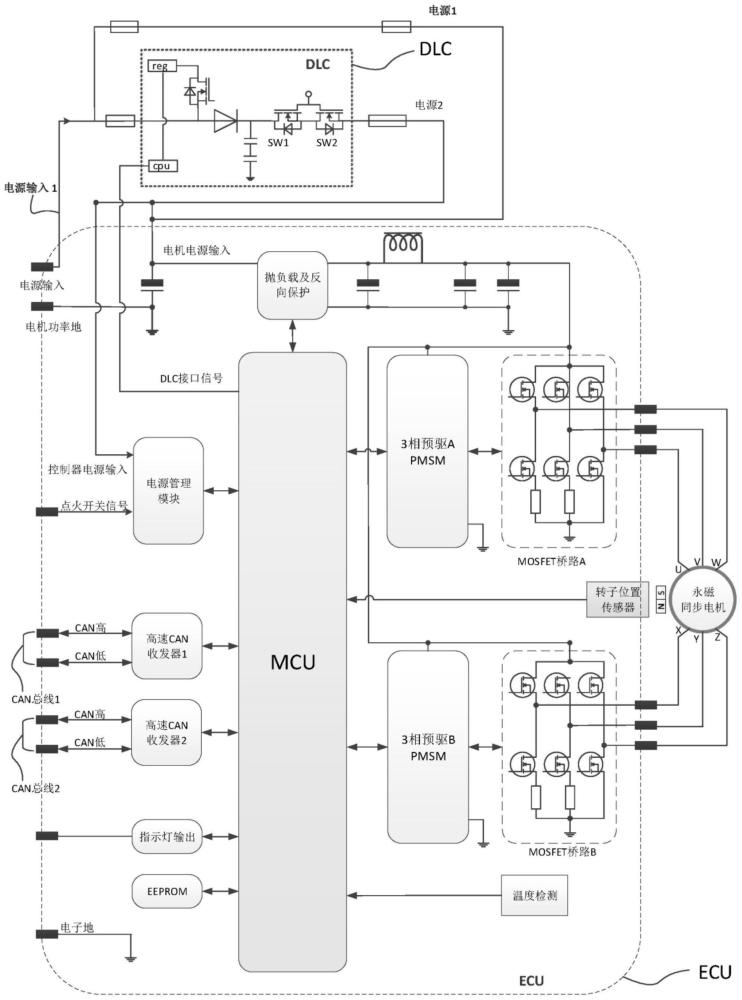
图1是本发明一种线控底盘执行器的冗余系统的整体框图;
图2是本发明微处理器MCU的结构框图;
图3是本发明电池状况检测模块BMS的结构框图;
图4是本发明DLC的电压电流承载变化的示意图;
图5是本发明正常情况下,DLC保持不接入(DLC Off)与接入(DLC On)供电环路的状态迁移图;
图6是本发明电池健康状况检测逻辑示意图。
具体实施方式
下面结合附图和具体的实施例对本发明技术方案作进一步的详细描述,以使本领域的技术人员可以更好的理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
一种线控底盘执行器的冗余系统,包括电源单元和电子控制单元ECU,电源单元为系统供电,优选,电源单元包括电池和储能双层超级电容DLC,比如,图1中,电源单元包括蓄电池和储能双层超级电容DLC,二者属于冗余设计,采用储能双层超级电容DLC(DoubleLayer Capacitor)储能,在意外事故(比如线束断裂,电池电源断路或短路)使得底盘域控制器断电的情况下,储能双层超级电容DLC仍然能够提供足够的电能使得电控制动执行器可以实现数次主动制动请求,为例如自动紧急制动(AEB)以及自适应巡航(ACC)的功能实现提供了冗余手段;也可使电控转向执行器实现一定时间的持续主动转向请求,使车辆能够驶离车道并且停靠到安全地点。
如图2所示,为了提高系统的安全性,电机也采用双绕组冗余设计,一路三相绕组(即U、V、W),另一路三相绕组(即X、Y、Z),电子控制单元ECU包括可控制六相双绕组永磁同步电机的微处理器MCU,所述六相双绕组永磁同步电机轴端设置有电机转子位置传感器(底盘电控系统中,一般需要采用电机转子位置传感器的反馈信号实施位置的精准算法控制,简称为有感控制),所述电机转子位置传感器与微处理器MCU相连用于将信号输入到微处理器MCU,所述微处理器MCU通过三相预驱模块A和MOSFET桥路A控制六相双绕组永磁同步电机的一路三相绕组,所述微处理器MCU通过三相预驱模块B和MOSFET桥路B控制六相双绕组永磁同步电机的另一路三相绕组。
只用一个符合汽车功能安全的微处理器MCU芯片实现双绕组电机的2路预驱模块及MOSFET的开关控制作用,当1路预驱模块和MOSFET的开关控制出现故障失效时,另外1路预驱模块和MOSFET尚可发挥电机控制执行作用,使得线控底盘控制执行达到安全状态,也即车辆能够驶离车道并且停靠到安全地点。微处理器MCU控制执行六相电机驱动制动主缸机构、转向拉杆机构实现汽车轮胎与地面接触的动力学控制目的。
图2中,优选,微处理器MCU通过CAN通信模块进行通信,所述电池通过电源管理模块与微处理器MCU相连,所述电源管理模块用于MCU工作电压检测,保证MCU发挥正常演算以及诊断功能;所述微处理器MCU还与温度检测单元(热敏电阻)相连,所述温度检测单元实施参数标定后为MCU提供ECU电路板MOSFET的温度,即温度检测单元用于检测MOSFET桥路A和MOSFET桥路B的温度,为ECU电路进入保护状态提供判定条件。比如,MOSFET桥路A和MOSFET桥路B在电路板PCB的布置较近处设置热敏电阻测温传感器,实际温度测量后经过参数标定,MCU即可获取温度信息。
以图1所示系统为例,优选,还包括电池状况检测模块BMS,电池状况检测模块BMS连接在蓄电池和储能双层超级电容DLC之间,通过电池状况检测模块BMS检测蓄电池的健康状态,当判断电池为非健康状况,在需要线控驱动时,微处理器MCU控制执行器的功率降级驱动,电池状况检测模块BMS发送故障状况数据信息到数据CAN总线,微处理器MCU发出警报信息通知车辆控制主体的驾驶员或自动驾驶系统采取车辆的安全控制操纵。然后储能双层超级电容DLC由储能迁移到放电状态;实现了电源的冗余设计。图2中,CAN总线分为CAN总线1和CAN总线2,其中:CAN总线1主要用来:
1、与车辆总线进行信号的接受与发送,用于接受来自车辆数据总线的车速等信号;
2、接受来自车辆数据总线的环境感知决策系统的制动、转向请求信号等报文;
3、发送制动、转向执行控制时的制动灯点亮信号,或转向灯点亮信号;
4、发送控制执行电机的转角位置信号以及故障诊断通讯信号等报文等。
CAN总线2主要用来传送电池的健康状况信号。
具体的,如图3所示,电池状况检测模块BMS采集电池的启动电流、静态电压以及电池温度,进行电池模型以及电池参数的校验,并结合峰值电流监测以及与系统标定的负荷型谱比较,对电池的健康状况作出判断;当判断电池为非健康状况,经过CAN总线2传送信息到微处理器MCU,微处理器MCU控制执行器的功率降级驱动,启动储能双层超级电容DLC放电,并发出警报信息。必要时(配置时设定条件),比如,当电池的健康状况不能满足线控驱动的控制需求能量时,电子控制单元ECU发出指令控制系统进行安全状态迁移,对于线控底盘的制动与转向系统的功能,一般功能的安全状态定义为车辆驶离车道停入紧急车道停车并开启双闪灯,然后再取消相关电控干预,完成后即为迁移到安全状态。
优选的,电池参数整形是对电池电流、电压、温度以及峰值电流进行滤波、偏置、限位等处理,结合峰值电流监测以及与根据具体车辆的电池负荷工况进行标定的系统载荷谱比较(查表或根据测试数据拟合的线性函数计算值对比),对电池的健康状况作出判断。
电池的荷电状态SOC(State of charge),用来反映电池的剩余容量,其数值上定义为剩余容量占电池容量的比值,常用百分数表示,其取值范围为0~1,当SOC=0时表示电池放电完全,当SOC=1时表示电池完全充满,可通过电池端静态电压、充放电电流与温度以及内阻参数来估算。
优选,本发明的电池模型是基于SOC的变化量、电流、电压和上一个采样点对应的SOC值,建立适用于SOC缓变的电池线性模型,该模型对测量误差和错误的初始条件,有很高的鲁棒性,具体的,电池健康状况检测如图6所示包括:
步骤①、根据车辆实际情况设定初始条件,包括电池电压低限V1、电压高限V2、电压衰减变量的梯度值Vstp、监测时间间隔T1、判断电压衰减变量的梯度值Vstp连续循环次数Cnt2;设功能检测循环次数FC的初始值为0、电池电压采样的检测循环次数P的初始值为1且上限为Cnt1;设第P次电池电压采样值VB(P)=VB_ADC(P)且赋值VB(1)的初始值为VB_ADC(1),进入步骤②。
例如乘用车电压低限V1=9V,电压高限V2=16V,电池电压采样VB(P)的检测循环回数P的上限Cnt1=128,电压衰减变量Vd=VB(P-1)-VB(P)的梯度值Vstp=2V(假设V2=16V,判断电压衰减Vd的梯度Vstp连续循环Cnt2=4次时,电池电压为8V,因此可以判定电池故障)。
步骤②、赋值P的值加1、电池状况检测模块BMS进行第P次电压采样,采样值VB(P)=VB_ADC(P),进入步骤③;
步骤③、判断采样的电压值VB(P)是否属于区间[V1,V2]内,若是,则进入步骤④和步骤⑤;若否,进入步骤⑧;
步骤④、保持电池电源为ECU以及电机提供电力T1时长;
步骤⑤、电池状况检测模块BMS控制储能双层超级电容DLC保持不接入状态,进入步骤⑥;
步骤⑥、判断检测循环次数P是否大于Cnt1,若大于,则进入步骤⑦,否则,进入步骤②;
步骤⑦、复位P=1且VB(1)的值为步骤②中的采样值,然后进入步骤②;
步骤⑧、计算上次采样电压VB(P-1)与本次采样电压VB(P)的电压衰减变量Vd,进入⑨;
步骤⑨、判断电压衰减变量Vd是否大于衰减梯度值Vstp,如果否,则进入步骤
步骤⑩、FC的值加1,进入步骤
步骤
步骤
步骤
步骤
步骤
步骤
步骤
需说明的是:由于不同于传统燃油车的新能源车电池在运行工况没有发电机充电而产生过电压,因此,在逻辑判断框图中不考虑VB(P)>V2的情形。
储能双层超级电容DLC在正常电池供电的工况下电容经过电压调节reg进行充电;微处理器MCU监测供电系统电源,联同电池状况检测模块BMS检测结果信息,一旦有电池电源(即图中的电源1)状况不良不能提供动力电源驱动执行电机动作,或断电故障发生,控制储能双层超级电容DLC(即图中的电源2)导通,为底盘线控执行系统提供电源。储能双层超级电容DLC接续提供系统电能,保证在外部电源切断的故障情况下,线控系统仍然可以接受制动以及转向的指令请求实施3次助力以上的操纵功能实现,如图4所示,可见随着执行次数的增加,储能双层超级电容DLC的电压、电流逐渐衰减,但是技术要求是以车辆能够被制动停止,或者转向驶离车道停靠安全地带制动停止作为前提的,而采用储能双层超级电容DLC完全可以满足需求。
如图5所示,在正常情况下,储能双层超级电容DLC保持不接入(DLC Off)与接入(DLC On)供电环路的状态迁移图,根据不同的车况储能双层超级电容DLC可以处于充电、待机、放电、备份等模式,以保障系统的安全,采用电池状况检测模块BMS,实时进行电池健康状况监测,为底盘线控系统正常发挥功能提供预警安全保障。
对应的,一种线控底盘执行器的冗余方法,至少包括下述一种或组合的冗余方法:
(一)微处理器MCU通过三相预驱模块A和MOSFET桥路A控制六相双绕组永磁同步电机的一路三相绕组,所述微处理器MCU通过三相预驱模块B和MOSFET桥路B控制六相双绕组永磁同步电机的另一路三相绕组;
(二)电源单元包括电池和储能双层超级电容DLC;
(三)电池状况检测模块BMS采集电池的启动电流、静态电压以及电池温度,进行电池模型以及电池参数的校验,并结合峰值电流监测以及与系统标定的负荷型谱比较,对电池的健康状况作出判断;当判断电池为非健康状况,微处理器MCU控制执行器的功率降级驱动,电池状况检测模块BMS发送故障状况数据信息到数据CAN总线2,然后储能双层超级电容DLC由储能迁移到放电状态。
一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述所述的冗余方法。
一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述指令由所述处理器加载并执行以实现上述所述的冗余方法。
本发明基于一个主芯片实现冗余方案多样化,以合理的成本,为解决诸如电动汽车的新能源汽车线控底盘的冗余控制执行提供了手段。
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或者等效流程变换,或者直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种冗余设备及其测试方法、系统和存储介质
- 一种高线吐丝的控制方法、系统、存储介质和计算设备
- 分布式对象存储数据冗余方法、装置、设备及存储介质
- 一种数据存储方法、调度装置、系统、设备及存储介质
- 一种存储系统的状态检测方法、装置、设备及存储介质
- 一种线控底盘整体性能评价方法、终端设备及存储介质
- 一种产线设备中控系统的更新方法、外接更新模块和存储介质