栅极驱动器
文献发布时间:2023-06-19 19:18:24
相关申请的交叉引用
本申请要求于2022年3月7日提交的美国申请第17/653,730号的优先权,该美国申请要求于2021年10月8日提交的美国临时申请第63/262,264号的权益。
技术领域
本公开涉及功率集成电路,并且更具体地涉及被配置为切换和监测高功率切换设备的栅极驱动器。
背景技术
栅极驱动器是集成电路,该集成电路被配置为将低功率切换信号(如来自微控制器)转换为适用于驱动如功率金属氧化物半导体场效应晶体管(MOSFET)或绝缘栅双极型晶体管(IGBT)等高功率切换设备的高电流信号。换句话说,栅极驱动器可以是低功率域与高功率域之间的接口,并且可包括用于分离电力域的电隔离。为了安全性和可靠性,通经常需要监测高功率切换设备的状况。例如,过电流条件可损坏切换设备和/或其耦合设备(例如,电容器)。进一步地,由于过电流的高功率电平,过电流条件可给用户带来安全性问题。因此,栅极驱动器可被进一步配置为感测高功率切换设备的状况并且将这些状况报告给微控制器。因此,栅极驱动器可被配置为与微控制器进行通信。
发明内容
另一方面,本公开总体上描述了一种包括切换设备、栅极驱动器和控制器的高功率切换系统。该控制器被配置为将输入信号传输到栅极驱动器的输入引脚(输入)以控制切换设备的操作。该控制器被进一步配置为在栅极驱动器的故障引脚(FLTb)处接收故障信号以监测切换设备中的故障。该控制器被进一步配置为将多功能信号传输到栅极驱动器的多功能引脚(MFP)以控制栅极驱动器的操作。栅极驱动器被多功能信号配置为:禁用栅极驱动器的输出;激活故障测试以测试栅极驱动器的故障检测器电路;并且清除由栅极驱动器的故障检测器电路检测到的故障。
在至少一个方面,本公开总体上描述了一种栅极驱动器,该栅极驱动器包括驱动器电路、故障检测器电路、故障通信电路和多功能引脚(MFP)。该驱动器电路被配置为在栅极驱动器的输入引脚(输入)处接收输入信号并且将输出信号传输到切换设备,该切换设备在栅极端子处耦合到栅极驱动器的输出引脚(输出)。该故障检测器电路被配置为在栅极驱动器的去饱和引脚(DESAT)处接收去饱和信号(或者在栅极驱动器的电流感测(CS)引脚处接收电流感测信号)以便检测切换设备中的故障。该故障通信电路耦合到故障检测器电路并且被配置为:(i)当检测到故障时置位故障信号并(ii)将故障信号传输到栅极驱动器的故障引脚(FLTb)。栅极驱动器的多功能引脚(MFP)被配置为接收多功能信号,该多功能信号可将栅极驱动器配置为:(i)启用/禁用驱动器电路;(ii)激活故障检测器电路的测试;并且(iii)重置故障通信电路。
在栅极驱动器的可能的实施方案中,驱动器电路被配置为当多功能信号为低时传输低输出信号。
在栅极驱动器的另一个可能的实施方案中,驱动器电路(i)被配置为当多功能信号为低时传输低输出信号,并且(ii)被配置为当多功能信号为高时传输作为输入信号复制品的输出信号。
在栅极驱动器的另一个可能的实施方案中,故障通信电路包括闩锁,该闩锁响应于故障而由故障检测器电路设置为故障电平。
在栅极驱动器的另一个可能的实施方案中,故障通信电路包括闩锁,该闩锁响应于故障而由故障检测器电路设置为故障电平,并且闩锁通过多功能信号重置到正常电平,该多功能信号保持为低,持续至少与阈值时间段一样长的时间段。
在栅极驱动器的另一个可能的实施方案中,故障检测器电路包括耦合到多功能引脚的移位寄存器。移位寄存器被配置为在接收到多功能信号中的多个连续脉冲之后输出DSCHK信号以激活故障检测器电路的测试。
在栅极驱动器的另一个可能的实施方案中,故障检测器电路包括电容器,该电容器在DESAT引脚处外部耦合到栅极驱动器;放电晶体管,该放电晶体管被配置为当接通时将电容器放电到地;以及电流源,该电流源被配置为当放电晶体管关断时对电容器进行充电。电容器上的电压是DESAT引脚处的去饱和信号。
在栅极驱动器的另一个可能的实施方案中,故障检测器电路包括电容器,该电容器在DESAT引脚处外部耦合到栅极驱动器;放电晶体管,该放电晶体管被配置为当接通时将电容器放电到地;以及电流源,该电流源被配置为当放电晶体管关断时对电容器进行充电。电容器上的电压是DESAT引脚处的去饱和信号,并且放电晶体管被关断以激活故障检测器电路的测试。故障检测器电路的测试包括对电容器进行充电以增加DESAT引脚处的电压,将DESAT引脚处的电压与阈值进行比较,并且当电压超过阈值时检测故障。
另一方面,本公开总体上描述了一种用于测试栅极驱动器的故障检测器电路的方法。该方法包括:(i)在该栅极驱动器的多功能引脚处接收多功能信号;(ii)检测该多功能信号中的脉冲;以及(iii)确定该脉冲满足第一标准。在满足第一标准时,该方法包括:将该栅极驱动器配置为对外部电容器进行充电,这会增加在该栅极驱动器的DESAT引脚处接收到的DESAT信号。然后,该方法进一步包括:确定该DESAT信号满足第二标准以及在该栅极驱动器的故障引脚上保持故障信号。该方法进一步包括:(i)检测该多功能信号的电平变化;(ii)确定该电平变化满足第三标准;以及(iii)重置该故障引脚上的该故障信号。
在以下具体实施方式及其附图内进一步解释了前述说明性发明内容,以及本公开的其他示例性目标和/或优点、以及实现方式。
附图说明
图1A是根据本公开的第一种可能的实施方案的包括栅极驱动器的高功率切换系统的示意性框图。
图1B是根据本公开的第二种可能的实施方案的包括栅极驱动器的高功率切换系统的示意性框图。
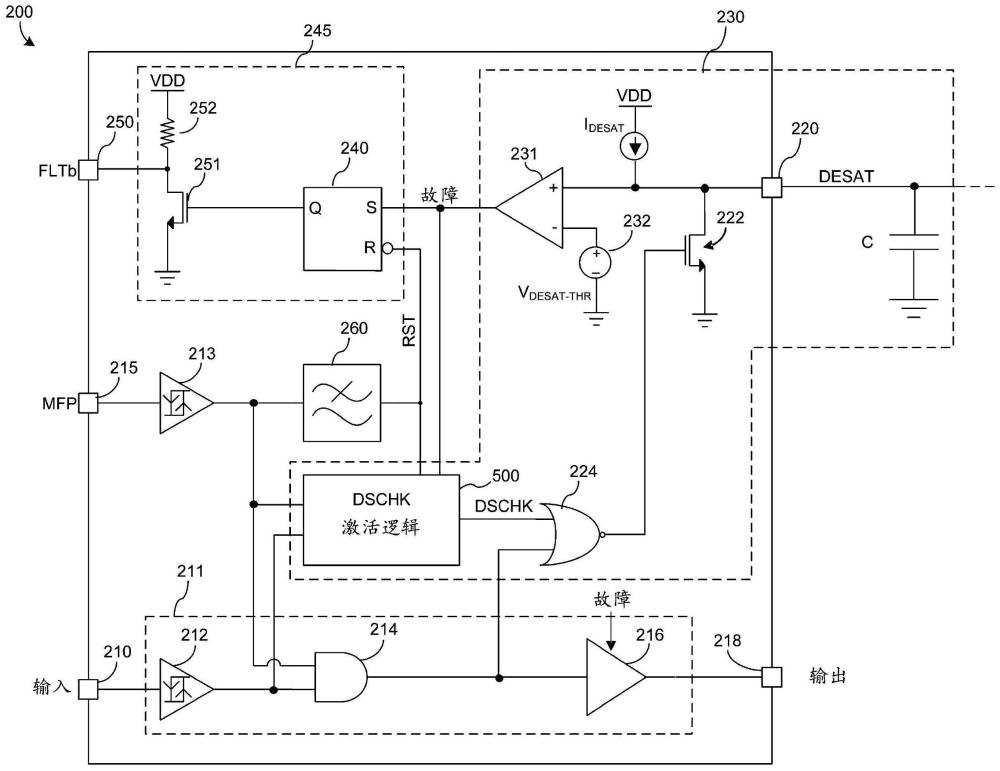
图2A是根据本公开的第一种可能的实施方案的栅极驱动器的示意性框图。
图2B是根据本公开的第二种可能的实施方案的栅极驱动器的示意性框图。
图3是根据本公开的可能的实施方案的示出由多功能信号控制的功能的信号的曲线图。
图4展示了汇总栅极驱动器的状态和状态之间的转变的状态图。
图5是根据本公开的可能的实施方案的去饱和检查(DSCHK)激活逻辑的示意性框图。
图6是展示了根据本公开的可能的实施方案的终止DESAT测试的信号的曲线图。
图7是展示了根据本公开的可能的实施方案的防止DESAT测试和响应故障的信号的曲线图。
图8是根据本公开的可能的实施方案的用于控制栅极驱动器进行其故障感测能力测试的方法。
图9是展示了根据本公开的可能的实施方案的执行其故障感测能力测试的栅极驱动器的信号的曲线图。
附图中的部件未必相对于彼此按比例绘制。相似附图标记在若干附图中表示相应的零件。
具体实施方式
本公开描述了一种栅极驱动器,该栅极驱动器包括与微控制器(即,控制器)关于切换以外的功能(即,辅助功能)进行通信所需的电路系统和协议。这些辅助功能可包括与感测和响应故障状况有关的功能,并且可包括(i)禁用驱动器的输出(例如,响应于感测到的故障状况);(ii)重置故障检测器的状态(例如,在故障状况结束之后);以及(iii)测试故障检测器(例如,以确保该故障检测器是能够操作的)。所公开的电路和方法可有利地通过在栅极驱动器的单个输入/输出引脚处组合这些功能来简化与微控制器的通信的复杂性。换句话说,所公开的栅极驱动器包括多功能引脚。
图1A是根据本公开的第一种可能的实施方案的包括栅极驱动器的高功率切换系统的示意性框图。系统100包括控制器(例如,微控制器110),该控制器通过栅极驱动器150控制切换设备120。栅极驱动器150在输出处耦合到切换设备120的控制端子(例如,栅极端子)。切换设备可以是任何高功率切换设备,包括(但不限于)功率MOSFET或IGBT。栅极驱动器150被配置为提供输出信号(输出)以根据来自微控制器110的输入信号(输入)改变切换设备120的切换状况(即,接通、关断)。例如,输入信号可以是脉冲宽度调制(PWM)信号,该脉冲宽度调制信号可根据调制,如在切换功率转换器上接通和关断切换设备。例如,切换设备可具有包括在同步降压(或升压)转换器中的高侧(HS)或低侧(LS)开关。进一步地,栅极驱动器可控制多个切换设备,如在多相(即,多通道)切换电源中。在这些实施方案中,可需要启用/禁用栅极驱动器的输出。例如,在轻负载条件下,可禁用包括切换设备120的相以节省电力。因此,栅极驱动器可从微控制器110接收启用信号(EN)以启用(或禁用)其输出。
到栅极驱动器150的输入信号(输入)可位于低功率域中,该低功率域从低功率、下轨电压(例如,低功率地(GND1)跨越到低功率、上轨电压(即,VDD1),同时来自栅极驱动器150的输出信号(输出)可处于高功率域中,该高功率域从高功率、下轨电压(例如,高功率地(GND2))跨越到高功率、上轨电压(即,VDD2)。
在一些实施方案中,从高功率域到低功率域的串扰可削弱功能或损坏低功率电路系统。因此,对于这些实施方案,栅极驱动器可包括高功率侧与低功率侧之间的电隔离125。电隔离可用变压器或电容器实施。本公开可应用于具有或不具有电隔离125的栅极驱动器。
如所提及的,栅极驱动器150可被配置为执行辅助其主要切换功能的功能。例如,栅极驱动器可配置有故障保护功能。故障可以是由切换设备中的低阻抗(例如,短路)产生的过电流状况。可替代地,可通过耦合到切换设备的负载来产生过电流状况。例如,负载汲取的高电流(例如,当负载短路时)可产生过电流状况。故障(即,过电流)保护可以多种方式实施。图1A展示了栅极驱动器的可能的实施方案,该栅极驱动器被配置为通过切换设备的去饱和来确定过电流。图2A展示了栅极驱动器的可能的实施方案,该栅极驱动器被配置为基于在耦合到切换设备的感测电阻器中感测的电流来确定过电流。
图1A展示了通过感测切换设备120的去饱和实施的过电流保护。感测去饱和可以包括使用检测电路130测量切换设备(例如,IGBT)的集电极-发射极电压(V
当切换设备在处于饱和模式时,该切换设备作为接通/关断开关操作以将电流传导/阻断到负载。饱和模式可取决于切换设备的集电极-发射极电压。例如,当IGBT处于饱和模式时,集电极-发射极电压(V
图1B是根据本公开的第二种可能的实施方案的包括栅极驱动器的高功率切换系统的示意性框图,其中电流感测用于过电流保护。在此实施方案中,感测电阻器(R
一些应用(例如,汽车)需要周期性地检查栅极驱动器对电流保护的能力(即,故障监测)。对于图1A中所示的实施方案,微控制器可将去饱和-检查信号(DSCHK)传输到栅极驱动器150。去饱和-检查信号可模拟栅极驱动器的电路系统中的故障状况,使得栅极驱动器传输指示故障的故障信号(FLT)。因此,微控制器可传输DSCHK信号并且监测FLT信号以查看故障监测电路系统是否正确工作。对于图1B中所示的实施方案,微控制器可将电流感测-检查信号(CSCHK)传输到栅极驱动器151。CS-检查信号可模拟栅极驱动器的电路系统中的故障状况,使得栅极驱动器传输指示故障的故障信号(FLT)。因此,微控制器可传输CSCHK信号并且监测FLT信号以查看故障监测电路系统是否正确工作。
图1A和图1B所示的高功率切换系统展示了在微控制器110与栅极驱动器150之间传送的辅助信号(FLT、RST、EN、(DSHK或CSCHK))。这些信号可以是处于高状态(例如,大约VDD1)或低状态(例如,大约GND1)以指示信号的状况的二进制信号。可存在针对高信号的条件并且可不存在针对低信号的条件或反之亦然。因此,也可定义反相信号。例如,故障条信号(FLTb)可以是FLT信号的逻辑反相,并且重置条信号(RSTb)可以是RST信号的逻辑反相。微控制器110可以被配置为解释信号或其反相对应物。
图1A、图1B的栅极驱动器可包括用于传送每个辅助信号的引脚(即,通道),但是从大小、成本和复杂性角度,最小化传送辅助信号所需的引脚(即,通道)的数量可以是有利的。因此,本公开描述了一种栅极驱动器,该栅极驱动器被配置为有效地将重置(RST)、启用(EN)和故障检查信号(即,DSCHK、CSCHK)组合成单个多功能信号(MFP)。通过组合信号,仅使用一个引脚(即,多功能引脚)(例如,必要的)用于从微控制器接收这些信号,从而降低栅极驱动器的成本和复杂性。
本公开描述了在高电平与低电平之间切换(即,调制)的多功能信号,以便(i)启用/禁用栅极驱动器;(ii)重置栅极驱动器中的故障条件;以及(iii)激活故障测试(即,DESAT测试、CS)。因此,本公开进一步描述了一种栅极驱动器,该栅极驱动器包括被配置为解释来自多功能信号(MFP)的辅助信号的电路系统(例如,逻辑)。例如,栅极驱动器可包括用于从多功能信号(MFP)产生重置信号(RST)的电路系统(例如,逻辑)。进一步地,栅极驱动器可包括用于从多功能信号(MFP)产生去饱和检查信号(DSCHK)或电流感测检查信号(CSCHK)的电路系统。
图2A是根据本公开的第一种可能的实施方案的栅极驱动器的示意性框图。栅极驱动器包括耦合到输入引脚210并且被配置为接收输入信号(输入)的栅极驱动器电路211。输入信号可以是具有对应于期望的接通/关断切换状态的高/低电平的数字信号。输入信号可被输入到具有迟滞以去除切换噪声的第一比较器212。第一比较器212的输出可耦合到逻辑(例如,与栅极214)。与栅极214还被配置为从具有迟滞的第二比较器213的输出接收多功能信号(MFP)。第二比较器213被配置为从栅极驱动器200的MFP引脚215接收多功能信号。
与栅极214被配置为当输入信号和MFP信号为高时输出高信号,否则输出低信号。换句话说,MFP信号可用作启用信号,因为当MFP信号为高时,输入信号(输入)可通过与栅极214,并且当MFP信号为低时不通过与栅极214。与栅极214的输出耦合到放大器216,该放大器被配置为将低功率输入信号(输入)转换为高功率输出信号(输出)。放大器216的输出耦合到栅极驱动器200的输出引脚218,该输出引脚可以耦合到高功率切换设备的控制端子。
栅极驱动器200被配置为在去饱和引脚220处监测去饱和信号(DESAT)。如所讨论的,DESAT信号可以是外部耦合电容器(C)的电压,该电压可指示切换设备是否处于饱和模式。栅极被配置为在切换设备接通时测量DESAT信号。因此,栅极驱动器包括耦合在DESAT引脚与地(例如,GND2)之间的DESAT放电晶体管(即,放电晶体管222)。放电晶体管222的控制端子(例如,栅极端子)耦合到逻辑(例如,或非栅极),该逻辑被配置为当切换设备关断(即,输入信号为低)时将DESAT引脚220接地。如所示出的,逻辑可被实施为或非栅极224,当栅极驱动器启用并且进一步接收去饱和检查信号(DSCHK)时,该非栅极接收输入信号。DSCHK信号在正常条件下可以为低,并且在去饱和电路系统测试期间可以为高。换句话说,除非栅极驱动器(i)被禁用或(ii)执行去饱和测试,否则放电晶体管的状态对应于输入信号。例如,当输入信号为高(即,切换设备接通)时,放电晶体管222关断,并且当输入信号为低时(即,切换设备关断),放电晶体管222接通。
放电晶体管222可耦合到故障检测器电路的输入(即,故障检测器230),并且该放电晶体管的接通/关断状态可启用/禁用故障检测器230的操作。当启用时(即,放电晶体管222关断),故障检测器230可被配置为接收DESAT信号并且当DESAT信号满足标准时输出故障信号(故障)。例如,故障检测器230可将DESAT信号(即,V
故障检测器230可进一步包括电流源(I
故障检测器230的输出可以是故障信号(故障),该故障信号在检测到故障(例如,高电流状况)时为高,并且在未检测到故障(例如,正常电流状况)时为低。故障信号(故障)耦合到包括闩锁(例如,SR闩锁)的故障通信电路245。闩锁240可被配置为保持故障信号高,直到该闩锁被重置信号(RST)重置为止。闩锁240的输出可以通过输出晶体管251耦合到故障条引脚。
当检测到故障时,故障信号可通过闩锁240锁定为高,以将输出晶体管251切换为接通,从而将故障条引脚250耦合到地(例如,GND)。当闩锁240被重置为低时,输出晶体管251被关断,并且通过上拉电阻器252将故障条引脚250上拉至上轨电压(例如,VDD1)。因此,故障条信号(FLTb)是故障信号(故障)的反相版本,该故障信号被闩锁240保持为低,直到它被重置信号清除为止。
虽然栅极驱动器被配置为提供连续的DESAT保护,但所公开的栅极驱动器也可被配置为以测试模式执行DESAT测试。在DESAT测试中,迫使DESAT信号满足故障标准。同时,可监测FLTb信号。如果FLTb信号正确响应故障,则DESAT功能得到验证(即,DESAT测试通过)。例如,对故障的正确响应可以是转变为低电平的FLTb信号,其中该FLTb信号由闩锁保持。如果FLTb信号未正确响应故障(例如,FLTb信号不转变为锁定低状态),则DESAT功能未得到验证(即,DESAT测试失败)。
栅极驱动器200包括激活逻辑500(例如,DSCHK激活逻辑),该激活逻辑可在其它信号的上下文中解释MFP信号,如输入信号(输入)和故障信号(故障),以根据多个功能来配置栅极驱动器。多个功能可包括(i)禁用输出信号;(ii)开始DESAT测试(例如,以产生故障状况);以及重置故障状况(例如,以恢复正常操作)。
多个功能可对应于栅极驱动器的多个状态(即,状况)。例如,虽然输出被禁用,但是可以说栅极驱动器处于禁用状况(即,禁用状态)。虽然正在执行DESAT测试,但是可以说栅极驱动器处于测试状况(即,测试状态)。虽然检测到故障,但是可以说栅极驱动器处于故障状况(即,故障状态)。当栅极驱动器不处于禁用状态、测试状态和故障状态时,栅极驱动器可处于正常状况(即,正常状态)。
图2B是根据本公开的第二种可能的实施方案的栅极驱动器的示意性框图。栅极驱动器包括如图2A中的故障通信电路245和栅极驱动电路211,但是包括基于感测电流信号(CS)而不是DESAT信号的故障检测器电路(即,故障检测器270)。如前所述,故障检测器270的输出可以是故障信号(故障),该故障信号在检测到故障(例如,高电流状况)时为高,并且在未检测到故障(例如,正常电流状况)时为低。在正常模式中,电流感测引脚221由第一开关274耦合到比较器231的正输入,而上电源电压(VDD)由第二开关273从比较器231的正输入解耦。比较器231被配置为将电压(即,CS信号)与耦合到比较器的负端子的电流感测阈值(V
栅极驱动器进一步包括激活逻辑500(即,CSCHK激活逻辑),该激活逻辑被配置为在其它信号的上下文中解释MFP信号,如输入信号(输入)和故障信号(故障),以根据多个功能来配置栅极驱动器。多个功能可包括(i)禁用输出信号;(ii)启动CS测试(例如,以产生故障状况);以及重置故障状况(例如,以恢复正常操作)。
在CS测试中,故障逻辑可将第一开关274配置为将CS引脚221从比较器231的正输入解耦,并且将第二开关273配置为将上轨电压(VDD)耦合到比较器231的正输入以便触发故障状况(即,故障=高)。激活逻辑500进一步被配置为在测试结束之后,通过经由第一开关274将CS引脚耦合到比较器231的正输入并且经由第二开关273将上轨电压(VDD)从比较器231的正输入解耦来去激活CS测试(即,重置故障状况)。可包括反相器275,使得可以互补方式控制开关。
图3是根据本公开的可能的实施方案的示出由多功能信号(MFP)控制的功能的信号的曲线图。在曲线图300中,信号在时间上对准,并且在高电平与低电平之间交替以指示状况并改变栅极驱动器的操作。曲线图包括DSCHK信号,但是应当理解,CSCHK信号可类似地表现。
在第一时间段310期间,栅极驱动器处于正常操作(即,处于正常状态)。在此,MFP信号为高以启用输出,使得输出信号跟随(即,匹配)输入信号。进一步地,在正常操作中,FLTb信号为高,指示未检测到故障(即,高电流),并且DSCHK信号为低,指示未进行DESAT测试。
在第二时段320期间,禁用栅极驱动器的输出(即,栅极驱动器处于禁用状态)。在此,MFP信号为低以禁用输出。当输出被禁用时,输出信号为低,尽管输入信号为高电平。在此,出于除故障或DESAT测试以外的原因禁用输出,因为在第二时段期间,FLTb信号为高,指示没有故障状况,并且DSCHK信号为低,指示未进行DESAT测试。
在第三时段330期间,栅极驱动器的正常操作(即,正常状态)恢复,因为MFP信号为高以启用输出,使得输出信号再次跟随(即,匹配)输入信号。进一步地,在正常操作中,FLTb信号为高,指示未检测到故障(即,高电流),并且DSCHK信号为低,指示未进行DESAT测试。
在第一时间335,FLTb信号转变为低,指示检测到故障。低FLTb信号禁用输出。因此,在第四时间段340期间,禁用栅极驱动器,并且栅极驱动器处于故障操作(即,在故障状态)。在此,通过FLTb信号为低禁用输出,尽管MFP信号为高。还注意,高输出信号(输出)在禁用时可缓慢关断,以防止电压尖峰(例如,由于反EMF)。换句话说,可根据软关断337(即,STO)禁用输出。图2A-图2B中所示的栅极驱动器200的放大器216可被配置为根据软关断(即,软关闭)曲线来减少输出信号。
在第二时间345,MFP信号转变为低,使得FLTb和MFP信号两者为低。如果此状况保持持续超过最小重置时间段(T
在第五时间段350期间,可关断输入信号(输入),并且可对MFP信号应用脉冲(即,切换),持续多个连续脉冲以开始DESAT测试。在第六时间段360期间,栅极驱动器处于DESAT测试操作(即,DESAT测试状态),DSCHK信号转变为高以禁用放电晶体管222,使得可对外部电容器(C)进行充电以进行测试。
图4展示了汇总状态和状态之间的转变的状态图,如用图3的信号描述的。栅极驱动器可在正常状态410(即,正常模式)下操作,其中输出信号跟随输入信号。正常状态410可以是栅极驱动器的最常见操作状态。正常状态以外的状态下的操作可以是暂时的,并且可最终导致返回到正常状态。
栅极驱动器还可在禁用状态420(即,禁用模式)下操作,其中输出保持为低。栅极驱动器可根据MFP信号的电平从正常状态410转变到禁用状态420并且从禁用状态420转变到正常状态410。即使当没有检测到故障时,栅极驱动器可在禁用状态下操作。
栅极驱动器还可在故障状态430(即,故障模式)下操作,其中输出保持为低。栅极驱动器可根据FTLb信号的电平从正常状态410转变到故障状态430。在故障模式下,FLTb信号以低电平锁定。当MFP信号保持为低,持续大于或等于阈值(T
栅极驱动器还可在DESAT测试状态440(即,DESAT测试模式、DSCHK模式)下操作,其中DSCHK信号保持为高。在多次(例如,15次)对MFP信号应用脉冲(例如,高/低/高)之后,栅极驱动器可从正常状态410转变到DESAT测试状态440。在DESAT测试状态440中,可对DESAT引脚处的电压进行充电,直到该电压超过阈值(V
如图2A和图2B所示,栅极驱动器200进一步包括激活逻辑500以产生DSCHK信号或CSCHK信号(即,DSCHK/CSCHK信号)。图5是根据本公开的可能的实施方案的激活逻辑电路的示意性框图。激活逻辑500被配置为控制去饱和检查信号(DSCHK)或电流感测检查信号(CSCHK)的电平。具体地,激活逻辑被配置为当对MFP信号应用脉冲(即,切换),持续多个循环时使DSCHK/CSCHK信号为高。高DSCHK/CSCHK信号可将栅极驱动器配置为在DESAT测试状态下以对外部电容器(C)进行充电或在CS测试状态下以将上轨电压耦合到比较器的输入。
激活逻辑500包括移位寄存器510。移位寄存器510的输入可耦合到高信号(即,VDD),并且移位寄存器的输出是DSCHK/CSCHK信号。移位寄存器包括串联耦合的多个触发器(例如,D型触发器)。MFP信号可耦合到触发器中的每个触发器的时钟输入,以便当对MFP信号应用脉冲时,高信号移位到移位寄存器的输出。例如,如果实施四个触发器,则可针对高信号(VDD)对MFP信号应用脉冲四次以到达输出。激活逻辑可包括耦合在MFP信号与移位寄存器510之间的低通滤波器520。低通滤波器520可从MFP信号中移除可导致移位寄存器510中的移位误差的杂散信号。
通过清除移位寄存器510,可去激活(即,使得为低)DSCHK/CSCHK信号。可在若干状况下清除注册的移位。因此,激活逻辑包括逻辑栅极(例如,或非栅极533),该逻辑栅极被配置为清除移位寄存器的触发器。
或非栅极533被配置为接收重置信号(RST)、输入信号(输入)和故障信号(故障)。如果RST信号为低,输入信号为高或故障信号为高,则或非栅极被配置为清除移位寄存器510。
如先前所提及的,可通过将MFP信号保持为低,持续大于阈值(例如,T
图6展示了通过将MFP信号保持为低,持续一定时间段(T
图7展示了当输入信号为高时阻止的DSCHK模式(即,DESAT测试状态)。虽然针对DSCHK模式示出,但可理解CSCHK模式可类似地操作。在第一时间710,切换MFP信号以开始DESAT测试(即,使得DSCHK为高)。然而,在第二720,输入信号转变为高。这清除了移位寄存器,并且因此DSCHK保持为低。换句话说,高输入信号阻止栅极驱动器进入DESAT测试状态并且保持在正常模式下。在正常模式下,输出信号跟随输入信号,但是当对MFP信号应用脉冲为低时被禁用。当输出信号被输入信号保持为高时,DESAT信号充电并且最终在第三时间730,达到故障状况,使故障信号为高。换句话说,在第三时间730,栅极驱动器进入故障状态。在此,关闭输出(例如,根据软关断(STO)曲线735。例如,故障信号可触发放大器216执行其输出的软关闭(SSD)(参见图2)。栅极驱动器保持在故障状态(即,FLTb为低)下,直到通过保持MFP信号为低,持续一定时间段,该栅极驱动器在第四时间740返回到正常状态为止。
图8是一种用于控制栅极驱动器以测试其故障检测电路的方法。方法800包括将栅极驱动器配置810用于正常操作(即,输出引脚处的输出信号跟随输入引脚处的输入信号)。方法800进一步包括在栅极驱动器的多功能引脚处接收820一系列脉冲。栅极驱动器可接收脉冲直到满足第一标准830为止。第一标准可在输入信号为低时接收多个连续脉冲。如果不满足第一标准,则栅极驱动器可被配置为重置815脉冲计数器(例如,移位寄存器)并且返回到正常操作810。然而,当满足第一标准时,方法800进一步包括配置840栅极驱动器以对外部电容器进行充电,该外部电容器产生增加的DESAT电压。DESAT电压可继续增加,直到其满足第二标准850为止。第二标准850可以是超过阈值的DESAT电压。当满足第二标准时,方法800进一步包括配置860栅极驱动器用于故障操作(即,故障状态)。在故障操作中,栅极驱动器可被配置为对外部电容器进行放电并且将故障信号(FLTb)传输到栅极驱动器的故障引脚。故障操作可继续,直到接收到870满足第三标准880的MFP信号为止。第三标准880可以是多功能引脚处的MFP信号保持为低,持续长于阈值时间的时间段。当满足第三标准880时,方法800包括清除890故障并且将栅极驱动器返回到正常操作810(即,正常状态)。
图9展示了在测试栅极驱动器的故障感测能力期间栅极驱动器的信号,如针对图8所展示的方法所描述的。虽然针对DSCHK模式示出,但可理解CSCHK模式可类似地操作。在第一时间910,在输入信号为低时,在栅极驱动器处接收MFP信号中的一系列15个连续脉冲,从而满足上文所描述的方法的第一标准。因此,栅极驱动器被配置为对外部电容器进行充电,该外部电容器增加了DESAT信号。在第二时间920,DESAT信号超过阈值,从而满足上文所描述的方法的第二标准。因此,栅极驱动器被配置为产生故障(FAULT),该故障清除DESAT信号并且在栅极驱动器的故障引脚处将故障信号(FLTb)锁定为低。在第三时间930,MFP信号保持为低,持续一定时间段,从而满足上文所描述的方法的第三标准。因此,栅极驱动器被配置为重置结束测试的故障信号(FLTb)。
一些具体实施可使用各种半导体处理和/或封装技术来实现。一些实施方式可使用与半导体衬底相关联的各种类型的半导体处理技术来实现,该半导体衬底包含但不限于,例如硅(Si)、砷化镓(GaAs)、氮化镓(GaN)、碳化硅(SiC)等。
虽然所描述的具体实施的某些特征已经如本文所述进行了说明,但是本领域技术人员现在将想到许多修改形式、替代形式、变化形式和等同形式。因此,应当理解,所附权利要求书旨在涵盖落入具体实施的范围内的所有此类修改形式和变化形式。应当理解,这些修改形式和变化形式仅仅以举例而非限制的方式呈现,并且可以进行形式和细节上的各种变化。除了相互排斥的组合以外,本文所述的设备和/或方法的任何部分可以任意组合进行组合。本文所述的具体实施可包括所描述的不同具体实施的功能、部件和/或特征的各种组合和/或子组合。
将理解,在前述描述中,当元件被提及为在另一个元件上、连接到另一个元件、电连接到另一个元件、耦接到另一个元件或电耦接到另一个元件时,该元件可以是直接地在另一个元件上、连接或耦接到另一个元件,或可以存在一个或多个中间元件。相反,当元件被提及直接在另一个元件上、直接连接到另一个元件、或直接耦接到另一个元件时,不存在中间元件。虽然在整个具体实施方式中可能不会使用术语直接在…上、直接连接到…、或直接耦接到…,但是被示为直接在元件上、直接连接或直接耦接的元件能以此类方式提及。本申请的权利要求书(如果存在的话)可被修订以叙述在说明书中描述或者在附图中示出的示例关系。
如在本说明书中所使用的,除非根据上下文明确地指出特定情况,否则单数形式可包括复数形式。除了附图中所示的取向之外,空间相对术语(例如,在…上方、在…上面、在…之上、在…下方、在…下面、在…之下、在…之以下等)旨在涵盖装置在使用或操作中的不同取向。在一些具体实施中,在…上面和在…下面的相对术语可分别包括竖直地在…上面和竖直地在…下面。在一些具体实施中,术语邻近能包括横向邻近或水平邻近。
- 栅极驱动器和包括该栅极驱动器的显示装置
- 栅极驱动电路、栅极驱动电路的控制方法和栅极驱动器
- 栅极驱动电路和栅极驱动器
- 栅极驱动电路和栅极驱动器
- 栅极驱动电路和栅极驱动器
- 栅极驱动器电路和用于驱动栅极驱动器电路的方法
- 栅极驱动器装置和栅极驱动器电路