一种基于实时定位信息的视觉检测方法
文献发布时间:2023-06-19 19:20:08
技术领域
本发明涉及视觉检测领域,具体涉及一种基于实时定位信息的视觉检测方法。
背景技术
目前,视觉检测方案已经广泛应用在加工制造业,特别是在汽车、船舶、航空航天等高精度制造领域。为了保证产品加工质量,需要严格要求视觉检测方案的检测精度。如,在涂装缺陷的检测领域,通过视觉检测+自动打磨的方式实现漆面缺陷自动检测与修复;由于自动打磨系统完全依靠视觉检测系统提供的缺陷位置执行打磨程序,因此缺陷位置检测的准确性十分重要。
在视觉检测方案的应用过程中,多个待测工件依次放置在检测工位内,视觉检测传感器分别进行检测。由于不同的待测工件在落位时,不可避免会发生位置偏移,这就使得待测工件与视觉检测传感器之间的相对位置发生了改变。而视觉传感器的检测位姿(如机器人检测轨迹、视觉检测传感器的安装位姿)是基于首个待测工件的位置示教得出的;当待测工件与视觉检测传感器之间的相对位置发生改变后,将会导致视觉检测传感器的检测结果存在位置偏差,影响检测精度。
为了减少待测工件落位偏差造成的精度损失,现有技术方案可分成以下两种:
方案一、在检测工位中安装高精度定位工装,将待测工件固定,依靠定位工装的加工精度保障不同的待测工件落位后,位置不发生偏移;如:高精度定位工装上会设置多个定位销,以待测工件的定位孔作为定位基准,使用时,插入到待测工件的定位孔中,销孔配合限制待测工件的自由度,控制待测工件在X、Y、Z三个轴向的直线运动,和绕着X、Y、Z的旋转运动的六个自由运动度。
此方案存在以下问题:成本高,特别是针对于大型工件的定位工装(如:车身、飞机机身骨架、飞机机身蒙皮等定位工装),耗资巨大。
方案二、在定位工装上增加辅件,参见专利文献CN 109443273 B利用三维测量系统对待测工件进行精确定位的方法,其通过解算待测工件安装在夹具(定位工装)前、后的坐标系与理论坐标系的转换关系,实现了对待测工件的精确定位。
该方案存在以下问题,每次待测工件落位后,均需要利用三维测量系统(激光跟踪仪、三坐标机、三维扫描仪)测量辅件,操作复杂、耗时长。
发明内容
为了解决上述问题,本发明提供了一种基于实时定位信息的视觉检测方法,本方法通过视觉定位传感器实时采集特征I,实现了对待测工件的实时定位,将实时定位结果补偿到光线交汇过程中,使得测量坐标解算更加准确;整个过程无需标准仪器(激光跟踪仪、摄影测量系统等)参与,也无需安装昂贵的定位工装,相比于现有方法,大大缩减了检测时间和设备成本。
本发明技术方案如下:
一种基于实时定位信息的视觉检测方法,在视觉检测工位内设有检测区域,其用于放置待测工件;在所述检测区域的周围设有视觉检测传感器和视觉定位传感器,预先标定二者之间的位置关系,记为RT
检测时,待测工件放置在检测区域内,视觉定位传感器采集待测工件上的特征I,所述特征I为待测工件上固有的特征孔、特征球或特征点,特征I有多个;
解算各个特征I在视觉定位传感器坐标系下的坐标,记为实测坐标;
记特征I在待测工件理论数模坐标系中的坐标为理论坐标;
利用理论坐标与实测坐标,解算出待测工件理论数模坐标系与视觉定位传感器坐标系之间的转换矩阵,记为RT
利用视觉检测传感器采集待测工件二维图像,解算图像中待测点或者缺陷点的像素坐标A;
基于视觉检测传感器中相机坐标系的原点与像素坐标A对应在相机坐标系中的点,构建空间直线;
利用RT
进一步,所述视觉定位传感器设有2~8个,其均布固定在检测区域的周围,用于采集待测工件不同位置处的特征I;
预先标定相邻视觉定位传感器的外参。
优选,特征I至少包括4个,且不共面。
进一步,视觉检测传感器设有一个或多个;
当其设有多个时,不同的视觉检测传感器用于采集待测工件上不同位置处的二维图像。
分别获取不同视觉检测传感器与视觉定位传感器之间的位置关系,检测时,根据二维图像所对应的视觉检测传感器与视觉定位传感器之间的位置关系,结合RT
进一步,视觉检测传感器安装在机器人末端,预先标定RT
在机器人末端固定一个或多个标志圆,机器人移动多个位姿,视觉定位传感器采集不同位姿下标志圆的图像,根据标志圆在图像中的坐标以及在机器人基坐标下的坐标,解算出视觉定位传感器坐标系与机器人基坐标系之间的转换关系;
利用手眼标定以及机器人D-H模型,获得视觉检测传感器坐标系与机器人基坐标之间的转换关系;
结合上述两个转换关系,得出视觉检测传感器坐标系与视觉定位传感器坐标系之间的转换关系,记为RT
进一步,视觉检测传感器固定在检测区域的周围,预先标定RT
在视觉检测传感器和视觉定位传感器的公共视场范围内,放置标定板,变化标定板位姿,每次变换,视觉检测传感器和视觉定位传感器均采集标定板图像,利用外参标定方法获得视觉检测传感器坐标系与视觉定位传感器坐标系之间的转换关系,记为RT
进一步,所述待测工件为汽车车身,所述视觉定位传感器设有4个,特征I为RPS孔。
本发明方案具有以下优点:
①在检测区域周围固定视觉定位传感器,依靠其采集特征I(特征孔、球、点),根据特征I的坐标,利用刚体变换获取转换关系,实现了对待测工件的实时定位,得出了待测工件理论数模与视觉检测传感器之间的真实位置关系,将实时定位结果(位置偏移)补偿到光线交汇过程中,通过旋转平移空间直线,使得检测结果更加准确,偏差小于3mm,满足精密加工制造业的检测精度要求。
②本方案中对于待测工件的定位过程,无需标准仪器(跟踪仪、三坐标机、摄影测量系统等)参与,大大缩减了定位和检测时间。对比的,现有方法需要利用标准仪器(激光跟踪仪、三坐标机、摄影测量系统等)采集待测工件上的特征,建立待测工件坐标系与标准仪器坐标系之间的转换关系,再利用标准仪器标定机器人建立机器人基坐标系与标准仪器坐标系之间的转换关系,通过标准仪器中转,建立待测工件坐标系与机器人基坐标系之间的转换关系,实现对工件的定位。该方法过程繁琐,需要在机器人末端安装特征(如跟踪仪靶球),并且令机器人变化多个位姿,标准仪器采集特征信息,构建转换关系,通常需要耗时6小时以上,耗时长,占用生产节拍。
③本方案中待测工件只需要落位到检测区域即可,在检测区域内无需安装复杂且昂贵的机械精定位装置(定位工装/支架),对比的,机械精定位装置升起-稳定-降下,整个过程耗时约6s,本发明方法,定位时间≤2s;既节约了加工成本又节省了安装时间。同时,机械精定位长期使用后磨损,会出现精度下降的问题,后期维护、保养、校准成本高。
附图说明
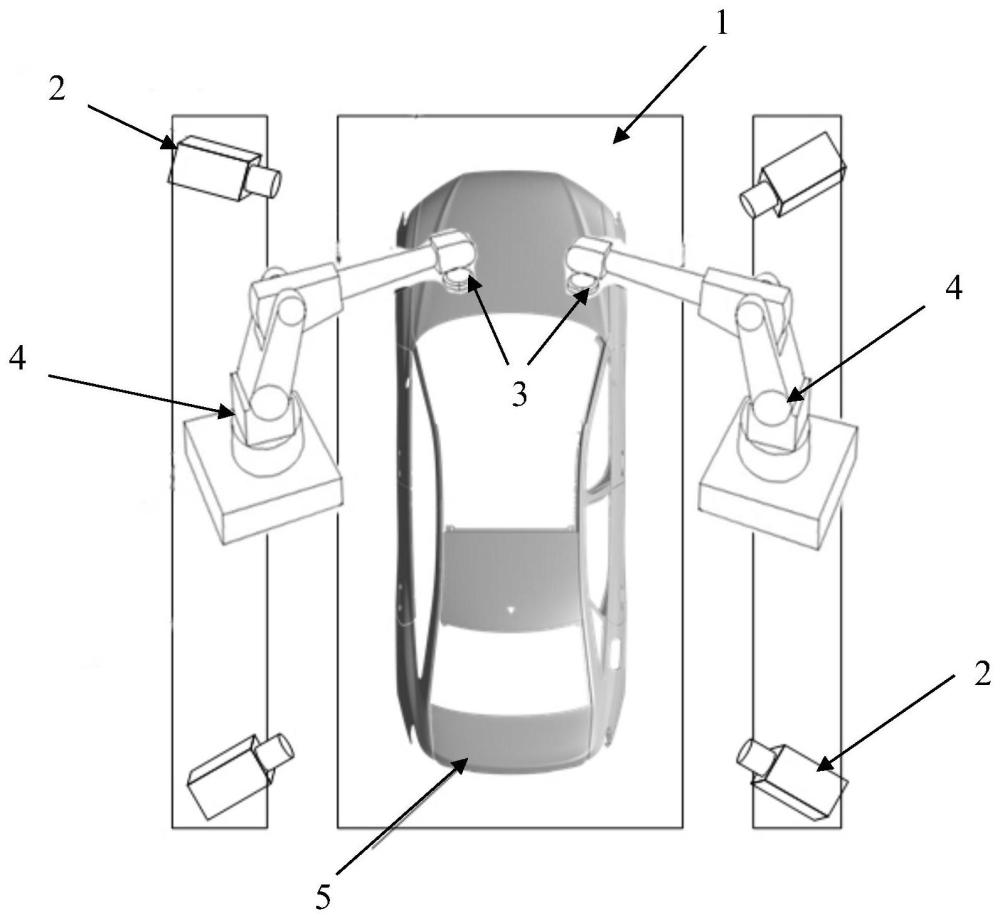
图1为具体实施方式中视觉定位传感器和机器人安装布局示意图;
图2为具体实施方式中光线交汇示意图。
具体实施方式
以下结合附图和具体实施方式对本发明的技术方案进行详细描述。
一种基于实时定位信息的视觉检测方法,其特征在于:在视觉检测工位内设有检测区域,其用于放置待测工件;在检测区域的周围设有视觉检测传感器和视觉定位传感器,预先标定二者之间的位置关系,记为RT
检测时,待测工件放置在检测区域内,视觉定位传感器采集待测工件上的特征I,特征I为待测工件上固有的特征孔、特征球或特征点,特征I有多个;
解算各个特征I在视觉定位传感器坐标系下的坐标,记为实测坐标;
记特征I在待测工件理论数模坐标系中的坐标为理论坐标;
利用理论坐标与实测坐标,解算出待测工件理论数模坐标系与视觉定位传感器坐标系之间的转换矩阵,记为RT
利用视觉检测传感器采集待测工件二维图像,解算图像中待测点或者缺陷点的像素坐标A;
基于视觉检测传感器中相机坐标系的原点与像素坐标A对应在相机坐标系中的点,构建空间直线;
利用RT
为了获取更多的特征I,使得RT
预先标定相邻视觉定位传感器的外参,即:相邻两个视觉定位传感器坐标系之间的旋转平移关系。
解算RT
其中,特征I至少包括4个,且不共面。
具体的,视觉检测传感器设有一个或多个;
当其设有多个时,不同的视觉检测传感器用于采集待测工件上不同位置处的二维图像。
分别获取不同视觉检测传感器与视觉定位传感器之间的位置关系,检测时,根据二维图像所对应的视觉检测传感器与视觉定位传感器之间的位置关系,结合RT
具体实施时,视觉检测传感器安装在机器人末端或者固定在检测区域的周围;
当视觉检测传感器安装在机器人末端,预先标定RT
在机器人末端固定一个或多个标志圆,机器人移动多个位姿,视觉定位传感器采集不同位姿下标志圆的图像,根据标志圆在图像中的坐标以及在机器人基坐标下的坐标,解算出视觉定位传感器坐标系与机器人基坐标系之间的转换关系;
利用手眼标定以及机器人D-H模型,获得视觉检测传感器坐标系与机器人基坐标之间的转换关系;
结合上述两个转换关系,得出视觉检测传感器坐标系与视觉定位传感器坐标系之间的转换关系,记为RT
当视觉检测传感器固定在检测区域的周围,预先标定RT
在视觉检测传感器和视觉定位传感器的公共视场范围内,放置标定板,变化标定板位姿,每次变换,视觉检测传感器和视觉定位传感器均采集标定板图像,利用外参标定方法获得视觉检测传感器坐标系与视觉定位传感器坐标系之间的转换关系,记为RT
其中,外参标定方法基于PNP原理解算RT
更详细的,当多个视觉检测传感器固定在检测区域的周围时,预先标定相邻视觉检测传感器之间的外参;即:相邻两个视觉检测传感器坐标系之间的旋转平移关系;
任取一个视觉检测传感器,解算其与和视觉定位传感器之间的位置关系;其他视觉检测传感器再结合已标定的视觉检测传感器之间的外参,转换得出其他视觉检测传感器和视觉定位传感器之间的位置关系。即RT
以下以待测工件为汽车车身为例,示例性阐述视觉检测过程:
一种基于实时定位信息的视觉检测方法,如图1所示,在视觉检测工位内设有检测区域1,其用于放置待测工件5(汽车车身);
在检测区域1的周围设有视觉检测传感器3和视觉定位传感器2,预先标定二者之间的位置关系(视觉检测传感器坐标系与视觉定位传感器坐标系之间的旋转平移关系),记为RT
本实施例中,视觉定位传感器设有4个,分布在检测区域的四个方位上,特征I为RPS孔。
视觉检测传感器安装在机器人4末端,预先标定RT
在机器人末端固定一个或多个标志圆,机器人移动多个位姿,视觉定位传感器采集不同位姿下标志圆的图像,根据标志圆在图像中的坐标以及在机器人基坐标下的坐标,解算出视觉定位传感器坐标系与机器人基坐标系之间的转换关系;
利用手眼标定以及机器人D-H模型,获得视觉检测传感器坐标系与机器人基坐标之间的转换关系;
结合上述两个转换关系,得出视觉检测传感器坐标系与视觉定位传感器坐标系之间的转换关系,记为RT
检测时,待测工件放置在检测区域内,视觉定位传感器采集待测工件上的特征I,特征I为待测工件上固有的特征孔、特征球或特征点,特征I有多个;
解算各个特征I在视觉定位传感器坐标系下的坐标,记为实测坐标;
记特征I在待测工件理论数模坐标系中的坐标为理论坐标;
利用理论坐标与实测坐标,解算出待测工件理论数模坐标系与视觉定位传感器坐标系之间的转换矩阵,记为RT
利用视觉检测传感器采集待测工件二维图像,解算图像中待测点或者缺陷点的像素坐标A;
如图2所示,基于视觉检测传感器中相机坐标系的原点(0,0,0)与像素坐标A对应在相机坐标系中的点,构建空间直线;
利用RT
由于待测工件的尺寸较大,视觉检测传感器的测量位姿有多个,机器人需要调整不同的位姿,带动视觉检测传感器在待测工件周围移动,在不同的测量位姿处采集汽车车身的图像;
此时,结合机器人D-H模型,能够获得不同的测量位姿处、视觉检测传感器坐标系与机器人基坐标之间的转换关系;
再结合已知的视觉定位传感器坐标系与机器人基坐标系之间的转换关系;可以得出不同的测量位姿处、视觉检测传感器坐标系与视觉定位传感器坐标系之间的转换关系。即RT
本方案通过视觉定位传感器采集特征I,根据特征I的坐标,利用刚体变换获取转换关系,实现了对待测工件的实时定位,得出了待测工件理论数模与视觉检测传感器之间的真实位置关系,检测结果精度高。待测工件只需要落位到检测区域即可,在检测区域内无需安装复杂且昂贵的机械精定位装置,节约成本和时间。
前面对本发明具体示例性实施方案所呈现的描述是出于说明和描述的目的。前面的描述并不想要成为毫无遗漏的,也不是想要把本发明限制为所公开的精确形式,显然,根据上述教导很多改变和变化都是可能的。选择示例性实施方案并进行描述是为了解释本发明的特定原理及其实际应用,从而使得本领域的其它技术人员能够实现并利用本发明的各种示例性实施方案及其不同选择形式和修改形式。本发明的范围旨在由所附权利要求书及其等价形式所限定。
- 一种基于仿生视觉的智能车目标实时检测与定位方法
- 一种基于单目视觉的实时障碍物检测和定位方法