基于铣削声实现骨铣削角度和深度监控的圆形麦克风阵列系统及方法
文献发布时间:2023-06-19 19:37:02
技术领域
本发明涉及手术辅助器械的技术领域,具体属于可以利用在骨铣削手术过程中产生的削骨声音来实现骨铣削角度和深度监控的圆形麦克风阵列系统。
背景技术
在大多的骨外科手术之中,都是由手术医生手持高速旋转的刀具完成对骨头的铣削等操作。刀具的振动以及医生的疲劳程度都会对铣削精度产生影响,因为铣刀大多为球形,所以铣刀在以不同的角度进行铣削时,它的瞬时铣削量是不同的。例如在椎板铣削减压手术之中:医生在以相同的力进行竖直持刀和倾斜持刀的时候,就会铣削掉不同厚度的椎板。如果医生因为错误判断铣削角度和深度,就非常有可能铣穿椎板伤害到神经或者其他软组织。
当今机器人的快速发展,在各行各业中都有非常广泛的应用,可以显著提高工作的效率以及安全性。针对上述问题,在手术过程中引入带有铣刀的机器人进行辅助手术,这样可以降低医生因为疲劳而造成的手术风险,手术机器人在进行骨铣削的过程中,不会出现像人手一样抖动或者打滑的情况。但是手术机器人无法像医生一样可以凭借经验来预测并选择合适的力度以及角度。加之在实际情况之中,骨面往往是有着不同密度以及曲度,并且会因人而异。这就使得铣刀和骨面接触部分的深度以及铣刀相对骨面的角度难以利用普通的传感器(测距仪,陀螺仪等)进行实时测量,这就给手术机器人的铣削深度以及角度的控制造成很大的困难。
目前对于铣削角度和深度的检测和控制主要依赖于各类传感器。如:力/力矩传感器、加速度计、激光位移传感器、麦克风等。以激光位移传感器为例:利用该传感器确实可以较为准确的测量出铣削深度,并且利用两个或者两个以上传感器就可以测量出刀具的铣削角度。但是这只是限于较为平整的骨面,而在实际手术过程中平整的骨面少之又少。另外力/力矩传感器和加速度计等在测量铣削角度的情况之中优势同样不明显。基于声音信号来检测骨铣削角度以及深度主要有以下几个优点:(1)麦克风价格相对便宜;(2)安装位置的精度要求低,不依赖特定的夹持装置。只需要将麦克风矩阵外附在刀具即可,不需要改变机器人的构型;(3)声音信号中包含信息量多,仅仅利用一个声音信号就可以得到角度和深度两个信息;(4)对于手术过程中的影响小,不发声不发光,对于手术过程中造成的干扰小。
发明内容
本发明是针对骨科机器人在骨铣削手术中铣刀铣削深度以及角度的监控问题,提出一种能够利用手术过程中削骨的声音实现骨铣削角度和深度监控的圆形麦克风阵列。圆形麦克风阵列通过外附在手术刀具上进行手术过程中的声音的采集,之后对声音信号进行处理。根据采集的铣削声音的相应的频率范围内的能量大小来实现对于铣削深度的监控,同时根据不同麦克风采集到的声音信号的相对差异来实现对于铣削角度的监控。
本发明的技术方案如下:
一种基于基于骨铣削声音实现骨铣削角度和深度监控的圆形麦克风阵列系统,本系统包括麦克风夹具,其上有N个麦克风组件,麦克风夹具的两端设有刀具夹持装置(卡爪)。麦克风夹具之上设有的麦克风分别通过通讯总线来与处理器相连接,在麦克风采集到声音信号之后传输至处理器之中,处理器对每一个麦克风采集到的声音信号进行短时快速傅立叶变换和小波变换,对声音信号的特性进行提取,并将对位麦克风的声音信号特性进行对比:(1)根据声音信号的相应频段的特性变化来反应铣削深度的变化;(2)根据对位麦克风采集的声音信号的相应频段的特性之间的相对之差的变化来反应铣削角度的变化。经过在人工骨材料的铣削实验校准之后,可以输出在铣削过程中深度以及角度的变化,并可以依此作为反馈信号来控制手术机器人工作在理想的工作状态。
所述麦克风夹具是指设计的一个可以放置麦克风并且可以将自身固定在铣刀之上的一个装置,麦克风夹具为中空贯通的圆锥台形状,在麦克风夹具上面开有N个麦克风组件卡槽,其数量需为偶数,并且其卡槽位置均符合中心对称原则。
所述的对位麦克风是指所设计的麦克风夹具上的某一麦克风和其中心对称的另一麦克风这样的一对麦克风称为对位麦克风。本发明通过不同的对位麦克风就可以实现不平面的角度监控。例如在夹具之中只加装一对对位麦克风便可以实现在一个铣削平面上的角度监控,若在此基础上再加装一对对位麦克风便可以实现两个平面的铣削角度监控。
所述的刀具夹持装置是指在麦克风夹具一端用于将整个麦克风夹具固定在铣刀之上的装置。由三个带限位的卡齿组成,每个卡齿之后都有弹簧负责将卡齿顶起,可以方便的实现麦克风夹具与刀具的速装速取。
所述的处理器,是负责处理由麦克风夹具上的N个麦克风所每隔n秒采集的声音信号,对声音信号进行处理分析,根据采集的声音特性差异,输出并监控铣削过程中的铣削深度和角度变化,其方法是,首先将采集的信号进行小波变换,并将变换之后的对位麦克风的数据进行相减,得到N/2个数据,在这N/2个数据中进行最大值搜索,得到最大的一组数据,该组数据对应的对位麦克风的平面即是铣削倾角发生的平面。其次设麦克风的采样频率为F,在对声音信号进行小波变换之后,将整个频段从0至F分为M份,每一份的频段宽度便为F/M。并且将S
本发明的优点和积极效果:
本发明可以做到实时采集骨组织铣削过程中的声音信号,只需通过一次小波变换就可以得到最佳的可以用于反应铣削角度的声音频段范围,可以省去一些筛选的时间。通过对位麦克风的这一设计能够克服在骨铣削过程中角度难以监控的难题。并且能够只利用声音这一个信号来同时监控角度和深度两个变量。可以很好的简化系统,降低系统的复杂程度。可以降低骨科手术机器人在工作时因为深度与角度控制不当而造成的的风险,可以减轻医生疲劳程度从而减少造成不良后果的隐患,从而提高骨铣削时的安全性。
附图说明
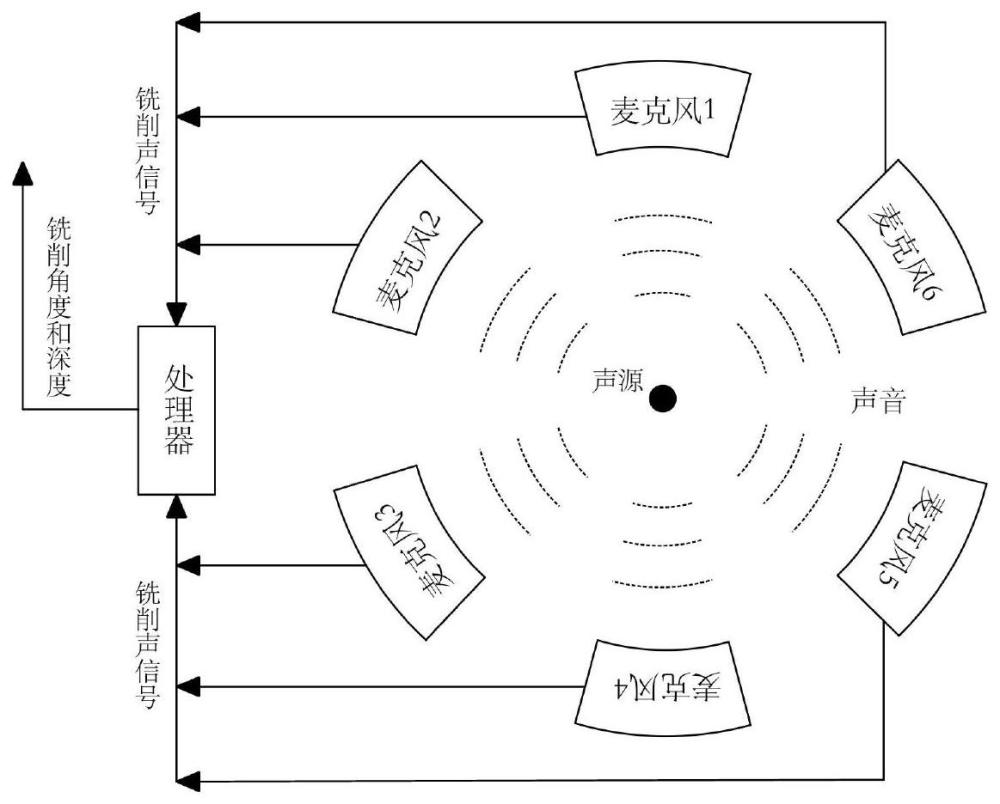
图1为本发明的一个实施例的系统框图;
图2为本发明的一个实施例的卡爪示意图;
图3为本发明的一个实施例的麦克风夹具示意图;
图4为本发明的一个实施例的麦克风组件示意图
图5为本发明的一个实施例的整体示意图;
图6为本发明的一个实施例的零件装配示意图;
图中,1卡爪外壳,2卡齿,3卡爪限位齿,4麦克风组件卡槽,5带有限位的卡爪安装槽,6带有限位的麦克风组件安装槽,7麦克风传输线,8麦克风组件限位齿,9麦克风底座,10麦克风,11麦克风组件防尘罩,12弹簧。
具体实施方式
实施例1:
本实施例提供的能够基于骨铣削声音实现骨铣削角度以及深度监控的圆形麦克风阵列系统如图1所示,系统内的卡爪、麦克风夹具、麦克风组件、系统整体组成和系统全部零件分别如图2、3、4、5、6所示。系统装配在铣刀之上,能够利用麦克风来采集骨铣削过程中的声音信号,并通过通讯总线将数据传输至处理器,再处理器对信号进行分析,输出铣刀相对骨面的铣削角度与深度的变化。
本系统构成如图5和图6所示,本系统包括两个卡爪,一个麦克风夹具,麦克风夹具上有N个麦克风组件卡槽4,每个麦克风组件卡槽4中安装有麦克风组件,麦克风组件卡槽4的数量需为偶数,并且其卡槽位置均符合中心对称原则。同样的,安装的麦克风组件需要成对出现,以使麦克风组件中两个中心对称的麦克风10形成对位麦克风。作为其中的一种实施方式,本例中N取6,M个麦克风组件中M同样取6,所有麦克风均通过通讯总线与处理器相连。需要明确的是系统可以判断的铣削角度平面的数量与安装的对位麦克风数量有关,因此,该N和M的数量可以取6个以外的其他偶数值。
所述卡爪如图2所示,卡爪主要由卡爪外壳1,卡齿2,弹簧12组成,卡爪是两层圆柱嵌套结构,包括卡爪头部和卡爪尾部,卡爪头部外侧的卡爪外壳1上开有三个卡齿槽,内部有三个设置在卡齿槽内的卡齿2,在卡齿2之后设有弹簧12负责将卡齿2顶起,依此起到固定的作用。卡爪尾部设有卡爪限位齿3作为限位机构,可与麦克风夹具两端的带有限位的卡爪安装槽5配合,组成一个整体后固定在铣刀之上。
所述麦克风夹具如图3所示,麦克风夹具形如中空的圆锥台,该形状方便麦克风组件的放置与取出,两侧同样有与卡爪配合的限位机构,该限位机构为麦克风夹具中空贯通的腔体两端开有与卡爪进行装配的带有限位的卡爪安装槽5。设有的N个麦克风组件卡槽4均分布在麦克风夹具的侧面并贯穿麦克风夹具的底面,在麦克风组件卡槽4的尾部形成与麦克风组件进行装配的带有限位的麦克风组件安装槽6。利用卡爪将自身固定在铣刀之上。
所述麦克风组件如图4所示。一个麦克风组件是由麦克风10、麦克风底座9、麦克风组件防尘罩11组成。其中麦克风底座9中设有通讯数据线与后端的麦克风传输线7连通,头部设有麦克风引脚的插口,麦克风10用引脚与麦克风底座9相连。考虑到本系统的工作环境,为了保证麦克风正常工作,在每一个麦克风前端加上防尘罩。麦克风底座9的尾部设有麦克风组件限位齿8,用于与麦克风夹具上的带有限位的麦克风组件安装槽相配合。
本发明通过铣削声圆形麦克风阵列系统实现骨铣削角度和深度监控的方法是,选择人工骨材料进行骨铣削实验。使用老虎钳将人工骨材料两端固定,设定铣削深度为0.4mm,横向移动速度设置为1mm/s,铣削角度设置为45度,铣削时长10秒,刀头转速为60000转/分。本系统外附与铣刀之上,使麦克风与刀头位置距离为10cm,麦克风采样频率为48000HZ,使用1组麦克风对进行声音信号采集。进行一段深度为0.4mm,铣削角度为45度,横移速度为1mm/s的一个实验。首先麦克风采集实验过程中前0.5秒的声音并将声音信号传输至处理器,处理器对声音信号进行一次小波变换,本例中所使用的小波变换的公式为:
- 能够基于铣削声实现骨铣削深度监控的麦克风阵列系统
- 能够基于铣削声实现骨铣削深度监控的麦克风阵列系统