一种分拣和叠板的一体式夹具及其使用方法
文献发布时间:2023-06-29 06:30:04
技术领域
本发明属于家居行业技术领域,特别是涉及一种分拣和叠板的一体式夹具。
背景技术
板材是做成标准大小的扁平矩形建筑材料板,用来作墙壁、天花板或地板的构件,划分为薄板、中板、厚板、特厚板、通常做成标准大小的扁平矩形建筑材料板,在家居板材生产过程中,常常需要对板材进行分拣和码垛。
但它在实际使用中仍存在以下弊端:在家居板材生产过程中,常常需要对板材进行分拣和码垛,而在对特大板进行分拣和码垛时,会出现掉板的情况,存在一定的安全隐患,且超大板和超小板的分拣一直都是难点问题,传统都是在手工线上生产,自动线只生产常规板件。
因此,现有的一种分拣和叠板的一体式夹具,无法满足实际使用中的需求,所以市面上迫切需要能改进的技术,以解决上述问题。
发明内容
本发明的目的在于提供一种分拣和叠板的一体式夹具,通过超薄吸盘、吸盘壳、固定板、吸盘控制电磁阀、正负压检测元件、超薄圆形吸盘,六轴机器人手臂、正负压检测元件、旋转件、支撑件、夹紧件,解决了在家居板材生产过程中,常常需要对板材进行分拣和码垛,而在对特大板进行分拣和码垛时,会出现掉板的情况,存在一定的安全隐患,且超大板和超小板的分拣一直都是难点问题,传统都是在手工线上生产,自动线只生产常规板件的问题。
为解决上述技术问题,本发明是通过以下技术方案实现的:
本发明为一种分拣和叠板的一体式夹具,包括超薄吸盘,其特征在于:所述超薄吸盘相对的垂直位置处设置有四个超薄圆形吸盘,多个所述超薄圆形吸盘的吸附面位于同一个平面,且所述超薄圆形吸盘的右端相抵接设置有支撑件,各吸盘独立控制,根据数据信息,可自动组合使用,无需人为干预。
进一步地,所述支撑件上设有沿所述支撑件上方延伸的控制台,所述控制台的前方设有活动安装在支撑件上的六轴机器人手臂,所述吸盘控制电磁阀设置有正负压检测元件,设计有正负压检测功能,能及时判断夹具使用情况,及时设备维护人员提示,利用六轴机器人手臂在机器人作业范围内,能存储更多的木板,提高了库位,能提高单批次的订单数量,从而降低生产损耗,提升企业效益。
进一步地,所述超薄吸盘上包括吸盘壳和固定板,所述吸盘壳为中空的蜂窝结构,能够使超薄吸盘内由负气压变成零气压或稍为正的气压,从而完成了提升搬送重物的任务。
进一步地,所述超薄圆形吸盘包括支撑板和固定件,所述所述超薄圆形吸盘与支撑板之间通过固定件固定连接,便于对搬运物品时能够有效的固定,防止出现松动导致坠落。
进一步地,所述六轴机器人手臂的下方转动连接有旋转件,便于六轴机器人手臂能够灵活的转动。
进一步地,所述支撑件的上设有固定连接在六轴机器人手臂左侧的夹紧件,便于对物品进行有效的夹取。
一种分拣和叠板的一体式夹具的使用方法,其特征在于:
步骤一,当对板材进行分拣时,木板从输送线上流入,由上位机给出出入库信息,夹具根据板件大小信息和出入库指令;
步骤二,自动启动所需超薄吸盘和超薄圆形吸盘的种类和个数,由六轴机器人手臂驱动,进行出库或入库的动作;
步骤三,在对板材进行码垛时,由上位机给出码垛信息,夹具从横库和线体中的其一上取出板件,进行板件的码垛作业,码垛完成后,流入后段工序进行包装。
在步骤二中,当板件偏大,则启动2组超薄吸盘,当板件尺寸较小则启动2组超薄圆形吸盘。
本发明具有以下有益效果:
1、本发明通过超薄吸盘、吸盘壳、固定板、吸盘控制电磁阀、正负压检测元件、超薄圆形吸盘,可实现木板的横向出入库和叠板码垛功能,可将传统的完全分离的2个工序,合并在一个工站完成,同时解决了特大(长>2米,宽大于1米)和特小板(长<0.5米,宽小于0.2米)的分拣和码垛的难点问题,缩短了生产线长度和占地面积,提升工厂产能和生产线的兼容板件尺寸范围,从而实现减员增效、提产、降本等的问题。
2、本发明通过六轴机器人手臂、正负压检测元件、旋转件、支撑件、夹紧件,设计有正负压检测功能,能及时判断夹具使用情况,及时设备维护人员提示,利用六轴机器人手臂在机器人作业范围内,能存储更多的木板,提高了库位,能提高单批次的订单数量,从而降低生产损耗,提升企业效益,本夹具打破传统的夹取的方式,采用独特的组合设计,解决了众多难点问题。
附图说明
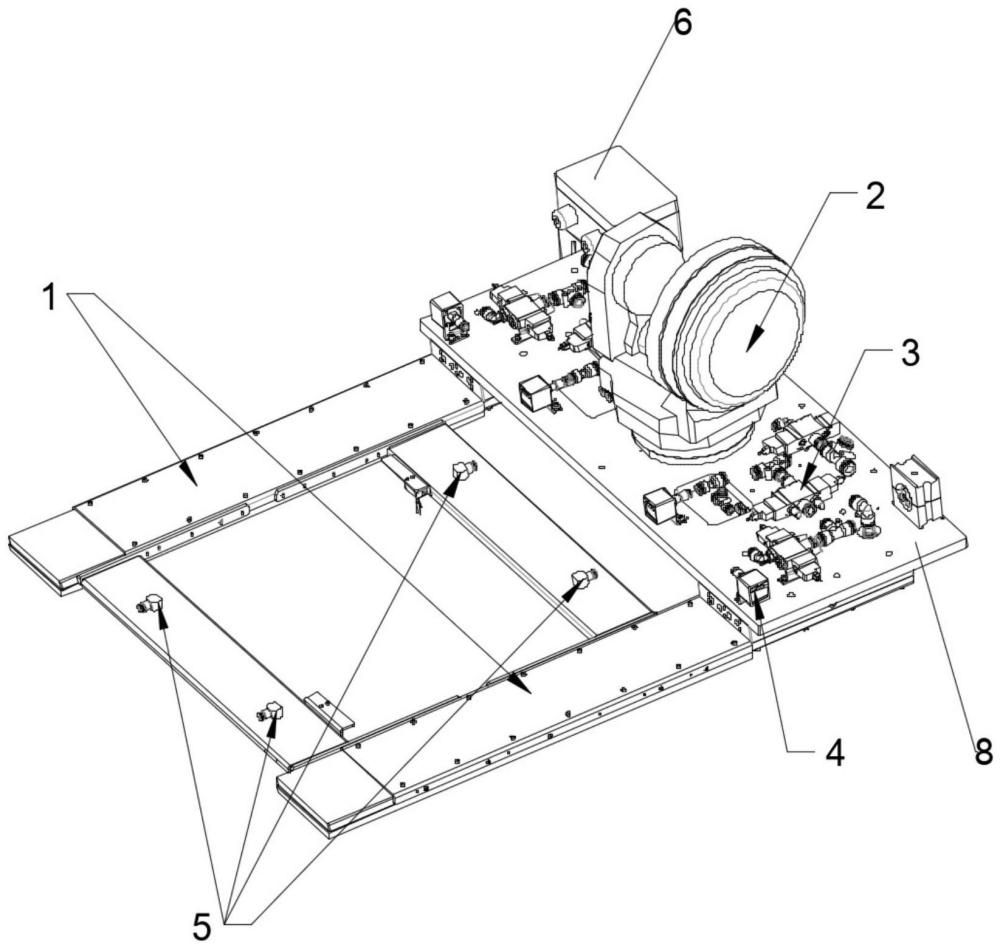
图1为本发明整体的结构示意图;
图2为本发明俯视的结构示意图;
图3为本发明左视的结构示意图;
图4为本发明后视的结构示意图;
图5为本发明仰视的结构示意图。
附图中,各标号所代表的部件列表如下:
1、超薄吸盘;11、吸盘壳;12、固定板;2、六轴机器人手臂;3、吸盘控制电磁阀;4、正负压检测元件;5、超薄圆形吸盘;51、支撑板;52、固定件;6、控制台;7、旋转件;8、支撑件;9、夹紧件。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
请参阅图1-5所示,本发明为一种分拣和叠板的一体式夹具,包括超薄吸盘1,其特征在于:超薄吸盘1相对的垂直位置处设置有四个超薄圆形吸盘5,多个超薄圆形吸盘5的吸附面位于同一个平面,且超薄圆形吸盘5的右端相抵接设置有支撑件8,各吸盘独立控制,根据数据信息,可自动组合使用,无需人为干预。
其中如图1所示,支撑件8上设有沿支撑件8上方延伸的控制台6,控制台6的前方设有活动安装在支撑件8上的六轴机器人手臂2,吸盘控制电磁阀3设置有正负压检测元件4,设计有正负压检测功能,能及时判断夹具使用情况,及时设备维护人员提示,利用六轴机器人手臂2在机器人作业范围内,能存储更多的木板,提高了库位,能提高单批次的订单数量,从而降低生产损耗,提升企业效益。
其中如图2所示,超薄吸盘1上包括吸盘壳11和固定板12,吸盘壳11为中空的蜂窝结构;能够使超薄吸盘1内由负气压变成零气压或稍为正的气压,从而完成了提升搬送重物的任务,超薄圆形吸盘5包括支撑板51和固定件52,超薄圆形吸盘5与支撑板51之间通过固定件52固定连接,便于对搬运物品时能够有效的固定,防止出现松动导致坠落。
其中如图3所示,六轴机器人手臂2的下方转动连接有旋转件7,便于六轴机器人手臂2能够灵活的转动。
其中如图5所示,支撑件8的上设有固定连接在六轴机器人手臂2左侧的夹紧件9,便于对物品进行有效的夹取。
本实施例的一个具体应用为:当对板材进行分拣时,木板从输送线上流入,由上位机给出出入库信息,夹具根据板件大小信息和出入库指令,自动启动所需超薄吸盘1和超薄圆形吸盘5的种类和个数,由六轴机器人手臂2驱动,进行出库或入库的动作。如板件偏大(长大于900,宽大于200),则启动2组超薄吸盘1,如板件尺寸较小(长<0.5米,宽小于0.2米)则启动2组超薄圆形吸盘5;在对板材进行码垛时,由上位机给出码垛信息,夹具从横库内取出板件,或从线体上吸取板件,进行板件的码垛作业,码垛完成后,流入后段工序进行包装。
以上仅为本发明的优选实施例,并不限制本发明,任何对前述各实施例所记载的技术方案进行修改,对其中部分技术特征进行等同替换,所作的任何修改、等同替换、改进,均属于在本发明的保护范围。
- 一种板件分拣系统及其分拣方法
- 一种筛分测量一体式矿石粒度检测装置及使用方法
- 一种凉席竹片分拣设备及其使用方法
- 一种餐具全自动分拣叠放包装联合机
- 一种长轴类零组件装配引导夹具及使用方法
- 一种PCB板用的铆钉叠板装置及使用方法
- 一种叠层零件腹板孔制孔夹具及使用方法