自适应输电线路中心变化的断股捋线机器人及其使用方法
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及输电线修复技术领域,特别是自适应输电线路中心变化的断股捋线机器人及其使用方法。
背景技术
现有的一些输电线断股修复机器人,包括载物平台、行走机构和捋线机构,行走机构和捋线机构设置在载物平台上,行走机构驱动所述装载平台在输电线路上移动,捋线机构在行走机构行走过程中通过转动的捋线盘对输电线捋线,以此来代替现有的人工修复,提高断股输电线路的修复效率。但目前的捋线盘大多采用固定式的安装,由于行走机构在行走过程中会引起输电线小幅度变化,固定式的捋线盘不能适应输电线的中心变化,不利于捋线盘对断股的输电线进行捋线。而且行走过程中,捋线盘对输电线的作用力大,容易对断股的输电线造成损伤。
发明内容
针对上述缺陷,本发明的目的在于提出自适应输电线路中心变化的断股捋线机器人及其使用方法,以解决现有技术中捋线盘不能适应输电线的中心变化而存在的捋线效率低和对输电线造成损伤的技术问题。
为达此目的,本发明采用以下技术方案:
本发明第一方面公开了自适应输电线路中心变化的断股捋线机器人,包括装载平台、行走机构和捋线机构,行走机构与捋线机构前后相间地设置在装载平台上;
捋线机构包括捋线盘、捋线盘底座和线盘转动组件,捋线盘底座设置在装载平台上,线盘转动组件包括驱动部和转动部,转动部转动设置在捋线底座上,驱动部用于驱动转动部顺着输电线的绕线方向转动;捋线盘相对转动部在上下左右前后方向浮动地设置在转动部,以随转动部转动。
进一步,本发明第一方面中,转动部包括第一齿轮,第一齿轮的端面设有若干个连接孔;捋线盘设置在第一齿轮的端面,捋线盘设有与连接孔一一对应的贯穿孔,贯穿孔的孔径大于连接孔的孔径;
捋线盘与第一齿轮之间通过连接件连接,连接件沿轴向方向依次设有连接部、凸肩部和头部,连接部穿过通孔与连接孔固定连接,凸肩部间隙配合地设置在通孔内,凸肩部远离连接部的一端凸出贯穿孔,以使头部与捋线盘的端面间隔设置,头部的直径大于贯穿孔的内径。
进一步,本发明第一方面中,转动部还包括转动架,转动架设置在第一齿轮远离捋线盘的一侧面;转动架设有T型凸环台,捋线盘底座设有截面呈T型的环形滑道,环形滑道的中心与第一齿轮的中心在同一直线上,T型凸环台滑动设置在环形滑道内;捋线盘底座于T型凸环台处沿圆周方向均匀设置有若干个轴承,各个轴承的滚动面至少部分位于环形滑道内与T型凸环台的外壁相抵。
进一步,本发明第一方面中,捋线盘底座包括闭合驱动组件和两个线盘分座,闭合驱动组件可前后移动地设置在装载平台上,两个线盘分座左右对称设置,两个线盘分座均于闭合驱动组件传动连接,以驱动两个线盘分座在左右方向相互靠近和相互远离;
两个线盘分座均设有半圆滑道,两个半圆滑道在两个线盘分座合并靠拢时形成环形滑道;
转动架由两个半圆环拼接而成,两个半圆环与同侧的半圆滑道滑动连接,两个半圆环在两个线盘分座合并靠拢时形成转动架;
第一齿轮由两个半圆齿轮拼接而成,两个半圆齿轮一一对应地与半圆环连接,两个半圆齿轮在两个线盘分座合并靠拢时形成第一齿轮;
捋线盘由两个半圆捋线盘拼接而成,两个半圆捋线盘的圆心处设有半圆缺口,两个半圆捋线盘一一对应地与两个半圆齿轮连接,两个半圆捋线盘在两个线盘分座合并靠拢时形成捋线盘,两个半圆缺口形成供输电线通过的捋线通孔。
进一步,本发明第一方面中,闭合驱动组件包括闭合驱动件和传动丝杆;传动丝杆左右横向设置,传动丝杆的一端与闭合驱动件传动连接,使得传动丝杆可绕自身轴线正反转;传动丝杆的杆体上设有两个外螺纹部,且两个外螺纹部旋向相反设置;两个线盘分座的底部设有内螺纹部;通过内螺纹部与外螺纹部配合连接,使得两个线盘分座的底部套设于传动丝杆。
进一步,本发明第一方面中,两个半圆齿轮于轮齿处均设有一个检测孔,两个线盘分座均设有一个光电开关,当第一齿轮位于可开合位置时,两个光电开关的检测端与同侧的检测孔位置同时相对。
进一步,本发明第一方面中,两个半圆缺口的内壁分别设有锥度,以使合并形成的捋线通孔的内径沿入口至出口方向逐渐变小;捋线通孔的入口设有若干个弹簧圆柱件,若干个弹簧圆柱件沿着捋线通孔的圆周方向间隔均匀地排列设置在捋线通孔的内壁。
进一步,本发明第一方面中,半圆滑道沿T型凸环台的径向方向设有紧定件,T型凸环台的外壁设有弧形凹面,紧定件包括壳体、滚珠、弹簧和推顶座,壳体的两端开口,滚珠可转动地设置在壳体内,且滚珠部分凸出与壳体的开口与T型凸环台的外壁抵接,滚珠与弹簧的一端抵接,弹簧的另一端与推顶座连接,推顶座与壳体的内壁螺纹连接。
进一步,本发明第一方面中,一个半圆齿轮设有第一定位销钉,另一个半圆齿轮设有与第一定位销钉配合的第一定位销孔;一个线盘分座设有第二定位销钉,另一个线盘分座设有与第二销钉配合的第二定位销孔。
本发明第二方面公开了本发明第一方面的自适应输电线路中心变化的断股捋线机器人的使用方法,包括以下步骤:
行走机构在输电线上行走至待修复位置;
闭合驱动组件驱动两个线盘分座合并靠拢,使位于输电线两侧的半圆缺口拼接成捋线通孔,以将输电线套于捋线盘的捋线通孔内;
行走机构在输电线上向前移动,且驱动部驱动捋线盘绕输电线顺着输电线的绕线方向转动,以对输电线进行捋线作业;
当捋线机构位于捋线末端时,行走机构停止前进,捋线机构相对装载平台向前移动,驱动部维持驱动捋线盘绕输电线顺着输电线的绕线方向转动;
捋线机构完成捋线作业后,驱动部驱动捋线盘转动至可开合位置,闭合驱动组件驱动两个线盘分座分离,行走机构在输电线上退回。
本发明提供的技术方案可以包括以下有益效果:
在本发明提供的一种自适应输电线路中心变化的断股捋线机器人,通过将捋线盘相对转动部在上下左右前后方向浮动地设置在转动部,实现捋线盘浮动式安装,以适应行走机构在行走过程引起输电线的小幅度变化,利于捋线盘对断股的输电线进行捋线,同时还减少捋线盘对输电线的作用力,从而降低捋线盘对断股的输电线的损伤。
附图说明
图1是本发明的一个实施例的断股捋线机器人的结构示意图;
图2是本发明的一个实施例的断股捋线机器人的捋线机构示意图;
图3是本发明的一个实施例的断股捋线机器人的捋线盘安装在捋线盘底座的结构示意图;
图4是本发明的一个实施例的断股捋线机器人的捋线盘浮动安装在第一齿轮的结构示意图;
图5是本发明的一个实施例的断股捋线机器人的捋线机构主动侧结构示意图;
图6是本发明的一个实施例的断股捋线机器人的捋线机构从动侧结构示意图;
图7是本发明的一个实施例的断股捋线机器人的T型凸环台在环形滑道内与轴承配合的结构示意图;
图8是本发明的一个实施例的紧定件固定T型凸环台的结构示意图。
附图中:100-装载平台、200-行走机构、300-捋线机构、310-捋线盘、311-贯穿孔、312-半圆捋线盘、313-半圆缺口、314-捋线通孔、315-弹簧圆柱件、320-捋线盘底座、321-环形滑道、3211-半圆滑道、322-轴承、323-闭合驱动组件、3231-闭合驱动件、3232-传动丝杆、324-线盘分座、325-紧定件、3251-壳体、3252-滚珠、3253-弹簧、3254-推顶座、326-光电开关、327-第二定位销钉、328-第二定位销孔、330-线盘转动组件、331-第一齿轮、3311-半圆齿轮、3312-检测孔、332-转动架、3321-T型凸环台、3322-半圆环、3313-第一定位销钉、3314-第一定位销孔、333-转动驱动件、334-第二齿轮、335-连接孔、336-连接件、3361-连接部、3362-凸肩部、3363-头部、337-前后调节组件、3371-前后调节丝杠、3372-滑动平台、3373-前后调节驱动件。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
如图1-3所示,本发明第一方面公开了自适应输电线路中心变化的断股捋线机器人,包括装载平台100、行走机构200和捋线机构300,行走机构200与捋线机构300前后相间地设置在装载平台100上;捋线机构300包括捋线盘310、捋线盘底座320和线盘转动组件330,捋线盘底座320设置在装载平台100上,线盘转动组件330包括驱动部和转动部,转动部转动设置在捋线底座上,驱动部用于驱动转动部顺着输电线的绕线方向转动;捋线盘310相对转动部在上下左右前后方向浮动地设置在转动部,以随转动部转动。
在本发明提供的一种自适应输电线路中心变化的断股捋线机器人,通过将捋线盘310相对转动部在上下左右前后方向浮动地设置在转动部,实现捋线盘310浮动式安装,以适应行走机构200在行走过程引起输电线的小幅度变化,利于捋线盘310对断股的输电线进行捋线,同时还减少捋线盘310对输电线的作用力,从而降低捋线盘310对断股的输电线的损伤。
其中,可在输电线上行走的行走机构200是本领域技术人员常见的技术手段,本领域技术人员可以在市面上购买不同类型的行走机构200,本领域技术人员可以根据需求进行选择装配即可,本实施例不再对行走机构200做具体描述。
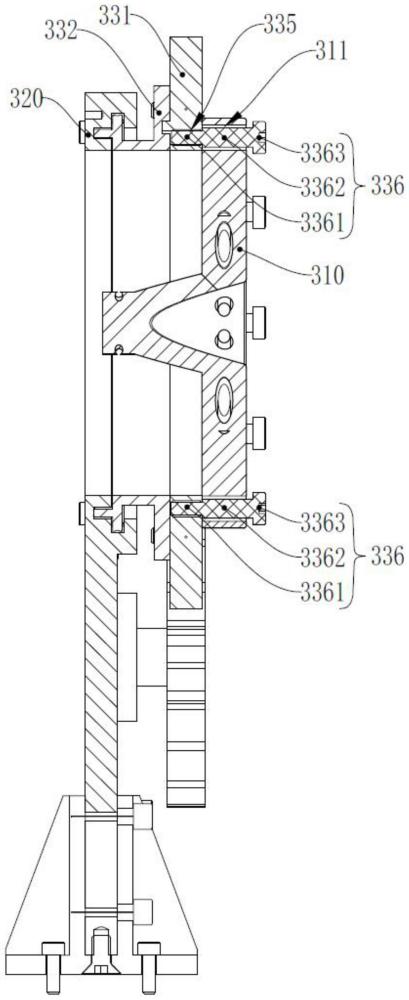
作为一种可选的实施例,转动部包括第一齿轮331,第一齿轮331的端面设有若干个连接孔335;捋线盘310设置在第一齿轮331的端面,捋线盘310设有与连接孔335一一对应的贯穿孔311,贯穿孔311的孔径大于连接孔335的孔径;
捋线盘310与第一齿轮331之间通过连接件336连接,连接件336沿轴向方向依次设有连接部3361、凸肩部3362和头部3363,连接部3361穿过通孔与连接孔335固定连接,凸肩部3362间隙配合地设置在通孔内,凸肩部3362远离连接部3361的一端凸出贯穿孔311,以使头部3363与捋线盘310的端面间隔设置,头部3363的直径大于贯穿孔311的内径。
具体地,连接件336可以是凸肩螺栓。在本实施例中,凸肩螺栓的连接部3361穿过贯穿孔311后与连接孔335连接固定,凸肩螺栓的凸肩部3362设置在贯穿孔311内,贯穿孔311的内径大于凸肩螺栓的凸肩部3362外径,如此,捋线盘310可相对第一齿轮331在上下左右方向上浮动。凸肩螺栓的头部3363位于捋线盘310的一侧,且凸肩螺栓的头部3363与捋线盘310的端面间隔设置,如此,捋线盘310可相对第一齿轮331在前后方向浮动。如此,实现捋线盘310相对转动部在上下左右前后方向浮动地设置在转动部上,以适应行走机构200在行走过程引起输电线的小幅度变化,利于捋线盘310对输电线进行捋线,同时还减少捋线盘310对输电线的作用力,从而减少捋线盘310对输电线造成的损伤。
在本实施例中,驱动部包括转动驱动件333和第二齿轮334,转动驱动件333的输出轴与第二齿轮334传动连接,以驱动第二齿轮334转动,第二齿轮334与第一齿轮331啮合。具体地,如图3所示,转动驱动件333设置在固定底座上,第二齿轮334固定地套设于转动转动驱动件333的驱动端,使得第二齿轮334进行转动,而第一齿轮331与第二齿轮334啮合,所以第二齿轮334在转动转动驱动件333的驱动下,也会带动第一齿轮331转动,从而使得与第一齿轮331传动连接的捋线盘310可以转动,从而实现断股输电线路的自动修复。其中,转动驱动件333可以是电机。本实施例中,通过采用第一齿轮331和第二齿轮334的驱动组件,目的在于这种驱动组件传动稳固、可靠,能确保捋线盘310的平稳转动,从而确保断股输电线路的修复。
作为一种可选的实施例,转动部还包括转动架332,转动架332设置在第一齿轮331远离捋线盘310的一侧面;转动架332设有T型凸环台3321,捋线盘底座320设有截面呈T型的环形滑道321,环形滑道321的中心与第一齿轮331的中心在同一直线上,T型凸环台3321滑动设置在环形滑道321内;捋线盘底座320于T型凸环台3321处沿圆周方向均匀设置有若干个轴承322,各个轴承322的滚动面至少部分位于环形滑道321内与T型凸环台3321的外壁相抵。
在本实施例中,第一齿轮331通过转动架332在捋线盘底座320上转动,从而实现捋线盘310可转动地设置在捋线盘底座320上。其中,如图3-6示出的实施例,T型凸环台3321嵌设在环形滑道321后,可在上下左右方向和前后方向对转动架332进行限位,以确保转动架332转动的稳定性,利于转动架332精确转动,从而提高第一齿轮331以及捋线盘310在捋线盘底座320上转动的稳定性。进一步,捋线盘底座320通过若干个轴承322的滚动面在环形滑道321内夹定转动架332,使转动架332与环形滑道321之间通过轴承322实现滚动摩擦,使转动架332转动顺畅,同时减少T型凸环台3321磨损。
作为一种可选的实施例,捋线盘底座320包括闭合驱动组件323和两个线盘分座324,闭合驱动组件323可前后移动地设置在装载平台100上,两个线盘分座324左右对称设置,两个线盘分座324均于闭合驱动组件323传动连接,以驱动两个线盘分座324在左右方向相互靠近和相互远离;
两个线盘分座324均设有半圆滑道3211,两个半圆滑道3211在两个线盘分座324合并靠拢时形成环形滑道321;
转动架332由两个半圆环3322拼接而成,两个半圆环3322与同侧的半圆滑道3211滑动连接,两个半圆环3322在两个线盘分座324合并靠拢时形成转动架332;
第一齿轮331由两个半圆齿轮3311拼接而成,两个半圆齿轮3311一一对应地与半圆环3322连接,两个半圆齿轮3311在两个线盘分座324合并靠拢时形成第一齿轮331;
捋线盘310由两个半圆捋线盘312拼接而成,两个半圆捋线盘312的圆心处设有半圆缺口313,两个半圆捋线盘312一一对应地与两个半圆齿轮3311连接,两个半圆捋线盘312在两个线盘分座324合并靠拢时形成捋线盘310,两个半圆缺口313形成供输电线通过的捋线通孔314。
如此,当闭合驱动组件323将两个线盘分座324分开后,第一齿轮331随线盘分座324分出两个半圆齿轮3311,使捋线盘310分开成两个半圆捋线盘312,实现打开捋线通孔314,使两个半圆捋线盘312在输电线的左右两侧。闭合驱动组件323将两个线盘分座324合并后,两个半圆齿轮3311拼接成第一齿轮331,两个半圆滑道3211拼接成闭合的环形滑道321,两个半圆捋线盘312拼接成捋线盘310,实现闭合捋线通孔314,使输电线位于捋线通孔314内。合并后的第一齿轮331可通过转动架332与环形滑道321配合实现相对两个线盘分座324转动,从而带动捋线盘310相对捋线盘底座320转动。
其中,捋线机构300还包括前后调节组件337,捋线盘底座320设置在前后调节组件337上,前后调节组件337用于捋线盘底座320前后移动,进而调节捋线盘310在装载平台100的前后位置。可选地,前后调节组件337包括前后调节丝杠3371、滑动平台3372和前后调节驱动件3373,前后调节丝杠3371的丝杆沿装载平台100的前后方向设置在装载平台100上,动平台与前后调节丝杠3371的螺母连接,闭合驱动组件323设置在滑动平台3372上,前后调节驱动件3373与前后调节丝杠3371的丝杆连接以驱动前后调节丝杠3371的丝杆转动。如此,实现前后调节组件337带动捋线盘底座320前后移动,达到调节捋线盘310在作业平台的前后位置的效果。当然,前后调节组件337还可以是直线模组等能实现线性往复移动的装置。
作为一种可选的实施例,闭合驱动组件323包括闭合驱动件3231和传动丝杆3232;传动丝杆3232左右横向设置,传动丝杆3232的一端与闭合驱动件3231传动连接,使得传动丝杆3232可绕自身轴线正反转;传动丝杆3232的杆体上设有两个外螺纹部,且两个外螺纹部旋向相反设置;两个线盘分座324的底部设有内螺纹部;通过内螺纹部与外螺纹部配合连接,使得两个线盘分座324的底部套设于传动丝杆3232。
如图2所示,传动丝杆3232的一端与闭合驱动件3231的驱动端传动连接,使得传动丝杆3232可以进行正反转动。在传动丝杆3232的自身外部上外螺纹部,而两个线盘分座324的底部分别设内螺纹部,且两个线盘分座324的内螺纹部的旋向相反。因此,在两个线盘分座324分别通过内螺纹部安装于传动丝杆3232后,当传动丝杆3232正反转时,由于两个内螺纹部的旋向不同,所以传动丝杆3232会带动两个线盘分座324相对移动。本申请通过传动丝杆3232,以及两个线盘分座324内设置不同旋向的内螺纹部,使得两个线盘分座324进行相对移动,从而实现两个半圆捋线盘312闭合成捋线盘310和实现捋线盘310分开成两个半圆捋线盘312,以关闭和打开捋线通孔314。这样的设置可以更方便、更精准地控制捋线通孔314的打开和闭合。其中,转动驱动件333、闭合驱动件3231可以是电机。
作为一种可选的实施例,两个半圆齿轮3311于轮齿处均设有一个检测孔3312,两个线盘分座324均设有一个光电开关326,当第一齿轮331位于可开合位置时,两个光电开关326的检测端与同侧的检测孔3312位置同时相对。
在具体应用中,当两个光电开光同时检测到检测孔3312时,则说明第一齿轮331处于可开合的位置,两个光电开光均向控制器发送信号,控制器接到信号后控制驱动部停止驱动转动部转动,然后控制闭合驱动组件323打开两个线盘分座324,从而实现将第一齿轮331分成两个半圆齿轮3311。在本实施例中,两个线盘分座324通过各自的光电开关326检测半圆齿轮3311是否到位,有效防止半圆齿轮3311未到位而发生误操作。
作为一种可选的实施例,两个半圆缺口313的内壁分别设有锥度,以使合并形成的捋线通孔314的内径沿入口至出口方向逐渐变小;捋线通孔314的入口设有若干个弹簧圆柱件315,若干个弹簧圆柱件315沿着捋线通孔314的圆周方向间隔均匀地排列设置在捋线通孔314的内壁。
如图5-6所示,在本实施例中,通过捋线盘310将输电线和断股在输电线外周的护线条套在捋线通孔314内。进一步地,捋线盘310在线盘转动组件330的驱动下,顺着输电线的绕线方向转动,从而带动位于捋线通孔314内的断股的护线条转动,并且在弹簧圆柱件315的挤压作用下,将断股的护线条挤压回输电线的凹陷部中,达到修复效果。其中,通过限定捋线通孔314的孔径从入口至出口方向逐渐减少,并使捋线通孔314的出口处的直径等于输电线的直径。因此,断股的护线条在捋线通孔314的入口处进行修复,然后在行走机构200的带动下,捋线通孔314的出口对已修复的断股处进行挤压,确保断股的护线条稳固地挤压回输电线路的凹陷部中,从而确保修复质量。
作为一种可选的实施例,半圆滑道3211沿T型凸环台3321的径向方向设有紧定件325,T型凸环台3321的外壁设有弧形凹面,紧定件325包括壳体3251、滚珠3252、弹簧3253和推顶座3254,壳体3251的两端开口,滚珠3252可转动地设置在壳体3251内,且滚珠3252部分凸出与壳体3251的开口与T型凸环台3321的外壁抵接,滚珠3252与弹簧3253的一端抵接,弹簧3253的另一端与推顶座3254连接,推顶座3254与壳体3251的内壁螺纹连接。
在本实施例中,当第一齿轮331处于可分开的位置时,设置在半圆环3322外壁的弧形凹面与滚珠3252相对,弹簧3253将滚珠3252部分推出壳体3251,使滚珠3252与弧形凹面相抵,实现紧定半圆环3322,对半圆齿轮3311起到一定的固定作用,以避免线盘分座324分开后半圆齿轮3311从线盘分座324上滑动。当第一齿轮331带动转动架332转动时,滚珠3252挤压弹簧3253并沿弧形凹面滚动到半圆环3322的外壁,实现对半圆环3322进行解锁,使第一齿轮331能够正常转动。其中,推顶座3254采用螺纹连接的方式与壳体3251内壁连接,当推顶座3254旋动时,可调节弹簧3253的弹力,从而调节紧定件325对半圆环3322的作用力。
作为一种可选的实施例,一个半圆齿轮3311设有第一定位销钉3313,另一个半圆齿轮3311设有与第一定位销钉3313配合的第一定位销孔3314;一个线盘分座324设有第二定位销钉327,另一个线盘分座324设有与第二销钉配合的第二定位销孔328。
如此,两个线盘分座324合并后,第一定位销钉3313插入第一定位销孔3314内,第二定位销钉327插入第二定位销孔328内,提高两个半圆齿轮3311和两个线盘分座324合拢的精确度,进而利于两个半圆齿轮3311拼接成第一齿轮331,两个半圆滑道3211拼接成环形滑道321。
本发明第二方面公开了本发明第一方面的自适应输电线路中心变化的断股捋线机器人的使用方法,包括以下步骤:
S1:行走机构200在输电线上行走至待修复位置;
S2:闭合驱动组件323驱动两个线盘分座324合并靠拢,使位于输电线两侧的半圆缺口313拼接成捋线通孔314,以将输电线套于捋线盘310的捋线通孔314内;
S3:行走机构200在输电线上向前移动,且驱动部驱动捋线盘310绕输电线顺着输电线的绕线方向转动,以对输电线进行捋线作业;
S4:当捋线机构300位于捋线末端时,行走机构200停止前进,捋线机构300相对装载平台100向前移动,驱动部维持驱动捋线盘310绕输电线顺着输电线的绕线方向转动;
S5:捋线机构300完成捋线作业后,驱动部驱动捋线盘310转动至可开合位置,闭合驱动组件323驱动两个线盘分座324分离,行走机构200在输电线上退回。
具体地,可以通过摄像头监控捋线机构300和行走机构200的作业,控制器根据摄像头采集到的图像判断捋线机构300是否位于捋线末端、捋线机构300是否完成捋线作业。在使用过程中,浮动式的捋线盘310适应行走机构200在行走过程引起输电线的小幅度变化,利于捋线盘310对断股的输电线进行捋线,同时还减少捋线盘310对输电线的作用力,从而降低捋线盘310对断股的输电线的损伤。
以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。