一种基于数字孪生的气助雾化喷射优化系统
文献发布时间:2024-01-17 01:24:51
技术领域
本发明属于航空发动机燃油喷射雾化技术,具体涉及一种基于数字孪生的气助雾化喷射优化系统。
背景技术
航空活塞发动机具有结构简单、容易维修、技术成熟等优势,是中小型无人机的首选动力装置。由于航空重油获取容易、易于存储、安全性高,现已成为航空活塞发动机的首选燃料。但是航空重油粘度和表面张力大,难以蒸发和雾化,这将会导致航空重油活塞发动机燃烧不稳定、冷起动困难、燃油经济性降低、排放恶化。
针对航空重油雾化困难的问题,主要有两种技术方案,一种是燃油预热技术,另一种则是缸内直喷技术,传统的缸内直喷喷油器(外开式喷油器、多孔式喷油器、旋流式喷油器)喷射压力较高,容易出现燃油湿壁,淹缸等现象。相比之下气助雾化喷射压力较低,现已成为小型航空重油直喷发动机的首选。气助雾化喷嘴由喷油嘴、喷气嘴两个喷嘴组成,喷油嘴将燃油喷入预混腔中与压缩气体混合后进行一次雾化,随后喷气嘴针阀打开,将燃油液滴和空气的混合物喷入气缸中,能够实现良好的雾化效果。
航空活塞发动机在飞行过程中海拔高度变化较快,存在很多不确定因素,如果空燃比不能准确控制将可能会引起燃油经济性恶化,甚至失火停机等问题。因此准确控制喷油量,使发动机缸内空燃比在一个合理的范围内变动,显得尤为重要。
在气助雾化喷嘴中,喷油嘴和喷气嘴都采用电磁阀对燃油和辅助气体进行喷射控制,喷嘴的电磁阀有电压型和电流型两种驱动方案,其中电流型驱动方案响应较快,能够对气助雾化喷嘴的喷射进行准确控制。由于航空重油发动机需要考虑爆震抑制问题,因此广泛采用基于三维MAP表的喷射脉宽开环控制,在固定转速和节气门开度下,喷射脉宽为固定值,在电流型驱动方案中,只需在喷油过程中对电流进行“峰值-保持”控制,控制过程中涉及到多个驱动参数,因此固定的喷射脉宽可以有多种不同的驱动参数组合。在喷射脉宽不变的基础上,若能寻找最佳的驱动参数组合,使燃油的雾化效果达到最好,将能够进一步提高采用气助雾化喷嘴的雾化性能。
发明内容
发明目的:本发明的目的在于解决现有技术中重油燃料雾化困难的问题,提供一种基于数字孪生的气助雾化喷射优化系统,通过喷雾试验台架的数据采集与驱动回路的参数建模构造数字孪生模型,在不更改喷射参数(喷射压力、喷射脉宽等)的前提下,通过优化驱动回路中的时间变量进行喷射优化,使燃油的索特平均直径(SMD)降低到最佳水平。
技术方案:本发明的一种基于数字孪生的气助雾化喷射优化系统,包括喷雾试验台架实体、驱动回路实体和计算机,喷雾试验台架实体包括定容弹、激光粒径分析仪和气助雾化喷嘴,激光粒径分析仪的发射端与接收端在定容弹两侧水平对称布置,气助雾化喷嘴设置于定容弹内;
所述驱动回路实体包括喷油嘴电磁阀驱动回路和喷气嘴电磁阀驱动回路,将这两路驱动回路通过参数建模映射到计算机中,构建对应驱动回路数字孪生模型;所述激光粒径分析仪采集并计算定容弹内喷雾颗粒的SMD数据;
所述计算机处理所接收到的SMD数据,然后根据驱动回路数字孪生模型进行喷射优化,不断进行寻优计算并更新驱动控制过程中的时间变量,更新完成后将新时间变量发送至驱动回路中的控制单元,驱动回路的控制单元利用新时间变量不断驱动气助雾化喷嘴进行喷射;
上述喷射优化是指计算机以自适应遗传算法(Adaptive Genetic Algorithm,AGA)对气助雾化喷射进行在线优化,获取最佳时间变量组合,使喷雾的SMD达到最小值,SMD是指喷雾的索特平均直径。
进一步地,所述喷雾试验台架实体还包括分别与气助雾化喷嘴相连的气路和油路,油路上依次设置有油箱、油泵、燃油加热器和燃油压力表,气路上设置有辅助气体气瓶,油路和气路之间连接有油气压力调节装置(调节气助雾化喷嘴的油气轨中油压和气压的大小);所述气助雾化喷嘴中还设有油气轨,油气轨中气压大小决定气助雾化喷嘴中油气混合物的喷射压力;所述定容弹底部设有空气压缩机、排气阀和压力表,定容弹上还设有加热器(加热定容弹内部环境气体)和温度传感器(用于监测定容弹内的环境气体温度,燃油温度可以通过燃油加热器控制);本发明的定容弹水平4个方向开有视窗,激光粒径分析仪的发射端与接收端在定容弹两侧水平对置,激光粒径分析仪通过定容弹的可视窗获取喷雾颗粒的SMD数据。本发明预先设定系统的燃油喷射压力、燃油温度、油气混合物喷射压力、定容弹内环境温度以及定容弹内环境压力。
进一步地,所述喷油嘴电磁阀驱动回路和喷气嘴电磁阀驱动回路采用相同结构的峰值-保持电流型驱动回路,峰值-保持电流型驱动回路的驱动控制过程中有三路驱动信号:高侧高压驱动信号、高侧低压驱动信号以及低侧驱动信号,其中低侧驱动信号的脉宽与喷射脉宽的大小相等,在整个控制喷嘴喷射过程中都处于高电平;这三路驱动信号驱动各自对应的MOS管,当驱动信号处于高电平时,MOS管导通,驱动信号处于低电平时,MOS管截止;驱动控制过程中,喷油嘴先开始驱动,经过时长为油气喷射间隔变量t
将驱动控制过程中的喷油嘴驱动时间变量、喷气嘴驱动时间变量以及油气喷射间隔变量作为驱动回路数字孪生模型喷射优化的驱动参数。本发明中主要涉及以下九个时间变量:喷油嘴驱动时间变量(喷油嘴驱动第一阶段持续时间t
进一步地,所述驱动回路数字孪生模型为喷射优化提供约束条件,其中喷油嘴与喷气嘴的电磁阀驱动回路在结构上完全一致,仅喷油嘴电磁阀和喷气嘴电磁阀各自的电阻值和电感值有数值上的区别;在建模过程中忽略MOS导通时的内阻。所述喷油嘴电磁阀驱动回路的参数建模过程如下:
第一阶段为驱动电流快速上升阶段,此时喷油嘴高侧高压驱动信号与喷油嘴低侧驱动信号均处于高电平,喷油嘴高侧低压驱动信号处于低电平,持续时间为t
求解微分方程,其中根据初始条件求解得到电流与时间的关系为:
将持续时间t
第二阶段为驱动电流缓慢上升至峰值阶段,此时喷油嘴高侧高压驱动信号通过PWM波进行直流斩波,喷油嘴低侧驱动信号处于高电平,喷油嘴高侧低压驱动信号处于低电平;PWM波持续时间为t
第二阶段中当喷油嘴高侧高压驱动信号处于高电平时则为上述第1回路,当喷油嘴高侧高压驱动信号处于低电平时,则形成第2回路,第2回路中二极管D1、喷油嘴电磁阀内阻、喷油嘴电磁阀线圈形成续流回路。第2回路等效为功率地PGND、二极管D1、喷油嘴电磁阀内阻、喷油嘴电磁阀线圈、喷油嘴低侧MOS管Q3、功率地PGND依次串联;其中二极管D1的导通压降为U
假设在第二阶段中,喷油嘴高侧高压驱动信号通过PWM共输出高低电平组合n
将低电平时间
同时,根据第1回路电流上升公式以及初始条件,将高电平时间
进而得到第二阶段中电流每经过一次高低电平组合的递推关系为:
根据递推法递推n
第三阶段为驱动电流快速下降阶段,此时喷油嘴高侧高压驱动信号以及喷油嘴高侧低压驱动信号均处于低电平,喷油嘴低侧驱动信号处于高电平,持续时间为t
第四阶段为电流缓慢下降阶段,此时喷油嘴高侧低压驱动信号通过PWM进行直流斩波,喷油嘴高侧高压驱动信号处于低电平,喷油嘴低侧驱动信号处于高电平,PWM波持续时间为t
假设在第四阶段中,喷油嘴高侧低压驱动信号通过PWM共输出高低电平组合n
将高电平时间
同时根据第2回路电流下降公式以及初始条件,将低电平时间
进而得到第四阶段中电流每经过一次高低电平组合的递推关系为:
根据递推法递推n
第五阶段为电流快速消失阶段,当喷油嘴高侧高压驱动信号、喷油嘴高侧低压驱动信号、喷油嘴低侧驱动信号全部为低电平,且电流将快速下降直至消失,形成第4回路;第4回路等效为功率地PGND、二极管D1、喷油嘴电磁阀内阻、喷油嘴电磁阀线圈、二极管D3、机载电源依次串联。二极管D3的导通压降为U
求解微分方程,其中根据初始条件求解得到电流与时间的关系为:
电流下降到0所需的时间为:
进一步地,所述喷气嘴电磁阀驱动回路的参数建模过程如下:
第一阶段为驱动电流快速上升阶段,此时喷气嘴高侧高压驱动信号与喷气嘴低侧驱动信号均处于高电平,喷气嘴高侧低压驱动信号处于低电平,持续时间为T
求解微分方程,其中根据初始条件求解得到电流与时间的关系为:
将持续时间T
第二阶段为驱动电流缓慢上升至峰值阶段,此时喷气嘴高侧高压驱动信号通过PWM波进行直流斩波,喷气嘴低侧驱动信号处于高电平,喷气嘴高侧低压驱动信号处于低电平;PWM波持续时间为T
第二阶段中当喷气嘴高侧高压驱动信号处于高电平时则为上述第1回路,当喷气嘴高侧高压驱动信号处于低电平时,则形成第2回路,第2回路中二极管D4、喷气嘴电磁阀内阻、喷气电磁阀线圈形成续流回路,第2回路等效为功率地PGND、二极管D4、喷气嘴电磁阀内阻、喷气嘴电磁阀线圈、喷气嘴低侧MOS管Q6、功率地PGND依次串联;其中二极管D4的导通压降也为U
假设在第二阶段中,喷气嘴高侧高压驱动信号通过PWM共输出高低电平组合N
将低电平时间
同时,根据第1回路电流上升公式以及初始条件,将高电平时间
进而得到第二阶段中电流每经过一次高低电平组合的递推关系为:
根据递推法递推N
第三阶段为驱动电流快速下降阶段,此时喷气嘴高侧高压驱动信号以及喷气嘴高侧低压驱动信号均处于低电平,喷气嘴低侧驱动信号处于高电平,持续时间为T
第四阶段为电流缓慢下降阶段,此时喷气嘴高侧低压驱动信号通过PWM进行直流斩波,喷气嘴高侧高压驱动信号处于低电平,喷气嘴低侧驱动信号处于高电平,PWM波持续时间为T
假设在第四阶段中,喷气嘴高侧低压驱动信号通过PWM共输出高低电平组合N
将高电平时间
同时根据第2回路电流下降公式以及初始条件,将低电平时间
进而得到第四阶段中电流每经过一次高低电平组合的递推关系为:
根据递推法递推N
第五阶段为电流快速消失阶段,当喷气嘴高侧高压驱动信号、喷气嘴高侧低压驱动信号、喷气嘴低侧驱动信号全部为低电平,且电流将快速下降直至消失,形成第4回路。第4回路等效为功率地PGND、二极管D4、喷气嘴电磁阀内阻、喷气嘴电磁阀线圈、二极管D6、机载电源依次串联。二极管D6的导通压降也为U
求解微分方程,其中根据初始条件求解得到电流与时间的关系为:
电流下降到0所需的时间为:
本发明的喷油嘴电磁阀驱动回路和喷气嘴电磁阀驱动回路共用高侧高压驱动电源、低侧驱动电源、机载电源、功率地PGND;其余所涉及的二极管、MOS管均为相同型号的不同元器件,而非共用同一元器件。
进一步地,在所述喷射优化之前,对下述时间变量进行约束以限制取值范围:喷油嘴驱动时间变量t
对于喷油嘴电磁阀,整个喷油过程的时间长短由喷油嘴喷射脉t
t
当电流达到一定数值时喷油嘴电磁阀线圈将开始移动,将线圈开始移动时的电流定为喷油嘴阈值电流i
则为保证在电流上升过程中喷油嘴可以顺利开启需要有约束:
t
对于t
峰值-保持的电流型驱动方案中电流在保持阶段需要大于喷油嘴阈值电流i
i
在驱动信号停止之后,电流需要一定时间下降至0,为保证喷油嘴精度,需要尽量减少喷油嘴的关闭延迟,因此设置约束时间t
t
对于喷气嘴电磁阀,整个喷油过程的时间长短由喷气嘴喷射脉宽T
T
当电流达到一定数值时喷气嘴电磁阀线圈将开始移动,将线圈开始移动时的电流定为喷气嘴阈值电流I
则为保证在电流上升过程中喷气嘴可以顺利开启需要有约束:
T
对于T
峰值-保持的电流型驱动方案中电流在保持阶段需要大于喷气嘴阈值电流I
I
在驱动信号停止之后,电流需要一定时间下降至0,为保证喷气嘴精度,需要尽量减少喷气嘴的关闭延迟,因此设置约束时间T
T
对油气喷射间隔变量t
确定上述共计9个时间变量的约束条件后,即可界定时间变量的搜索范围,行优化,自适应遗传算法优化的具体过程如下:
步骤(1)、对种群进行初始化和编码,要求个体的生成精度为1us,初始化数目为N的种群,将9个时间变量编码为二进制,依次连接成一个长二进制串后按照种群规模N和约束条件形成初始种群;
步骤(2)、将种群中的个体依次传送到驱动回路的控制单元,数据处理后作为驱动参数驱动气助雾化喷嘴喷射并进行SMD的测量,该过程等效为算法中的适应度计算过程;此处优化问题中优化目标为SMD,将适应度定为所测量SMD的相反数;所测量的数值通过喷雾试验台架中的激光粒径分析仪传送到计算机中处理保存后再被读取,当代所有个体的适应度值全部被读取之后进入下一步骤(3);
步骤(3)、将各适应度排序之后以轮盘赌的方式对个体进行选择,将选中的个体复制到新的种群中,由于适应度为所测量SMD的相反数,为负数值,因此需要通过改进公式计算每个个体的选择概率,改进公式如下:
其中,f
当个体适应度接近当代种群的最大适应度时,认为该个体性能较好,采用较低的到交叉概率和变异概率,保证其优良性;当个体适应度低于当前代数种群平均适应度时,认为该个体的性能不佳,采用较高的交叉概率和变异概率,加快个体更新速度。其中f为待变异个体的适应度数值,f
步骤(4)、经过选择、交叉、变异之后形成下一代的新种群,若迭代次数Gen未达到指定代数G,则增加1次迭代次数后返回执行步骤(2),否则终止计算,计算结束之后将适应度最高的个体取出并进行解码,获得最优的时间变量组合,同时适应度值的相反数为最佳SMD。
进一步地,所述步骤S1.2中驱动回路控制单元的执行步骤如下:
步骤(a)、接收到通信信号进入中断程序处理,此时将通信标志位设置为0(初始设置为1),不可再接收数据,所接收到的个体数据,对9个时间变量进行设置;
步骤(b)、设置结束后驱动气助雾化喷嘴进行喷射,为保证激光粒径分析仪数据分析的准确性,进行n
步骤(c)、多段喷射结束后进入个体间隔时间t
步骤(d)、进入主函数循环,直至接收到通信信号则重复步骤(a)-步骤(c)。
进一步地,步骤S1.2中的数据处理程序在激光粒径分析仪第一次测量到燃油液滴时,开始执行,具体数据处理过程如下:
S3.1:对气助雾化喷嘴喷射出的燃油液滴进行采样,保存采样数据至个体文件夹,文件夹可命名为“迭代代数Gen+个体序号n”的方式命名,便于数据管理。
S3.2:当经过时间t
其中d
S3.3:重复S3.1步骤并将文件夹命名中的个体序号n更新。当已经处理的个体数量到达种群规模N时,认为该代个体喷射结果的SMD全部计算完成,重复S3.1步骤时,将文件夹命名中的迭代代数Gen更新。当处理的代数到达设定代数G并且已经处理的个体数量达到种群规模N时,所有数据处理完毕后,退出处理程序。
有益效果:与现有技术相比,本发明具有以下优点:
1、本发明在固定的喷射脉宽下寻找最佳的驱动参数组合使燃油液滴SMD降到最低值,提高燃油的雾化效果,通过自适应遗传算法在一定范围内进行驱动参数的随机搜索,有利于寻找到合适的驱动参数组合。
2、本发明能够将驱动参数与发动机实际的喷射脉宽三维MAP表耦合,优化的驱动参数组合跟随对应的喷射脉宽,能够与航空活塞发动机其他优化(如爆震优化中的喷油-点火协同优化)相互适配。
3、本发明将喷雾试验台架、驱动回路、计算机利用数据交互充分的融合,结合数字孪生的思想,将优化算法中的约束与驱动回路中的参数模型相结合、令激光粒径分析仪的数据处理过程代替优化算法中适应度函数的计算过程,使实际的喷油粒径测量与虚拟的计算机优化相互交互,能够保证优化过程的准确性。
附图说明
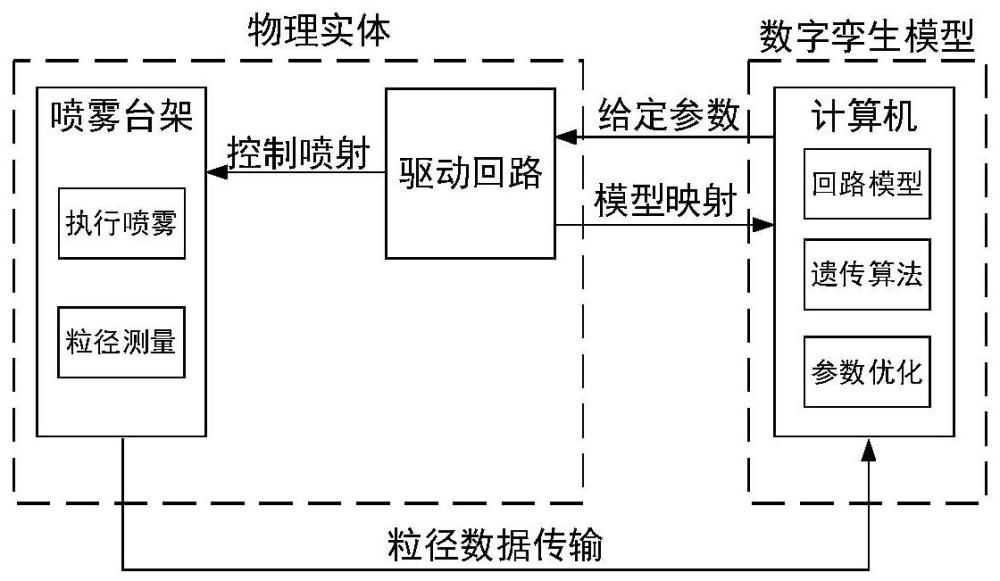
图1为本发明的整体架构示意图;
图2为本发明中喷雾试验台架结构示意图;
图3为本发明峰值-保持驱动回路示意图;
图4为本发明峰值-保持驱动回路在不同阶段形成的4种回路及其示意图;
图5为本发明喷嘴驱动时序及时间参数分布图;
图6为本发明计算机优化算法流程图;
图7为本发明驱动回路控制单元工作流程图;
图8为本发明激光粒径分析仪数据处理流程。
具体实施方式
下面对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
如图1所示,本发明的基于数字孪生技术的气助雾化喷射优化方法,驱动回路实体会通过参数建模的方法映射到计算机中,建立数字孪生模型。开始阶段,驱动回路采用初始时间变量(喷油嘴驱动时间变量
t
如图2所示,本实施例中喷雾试验台架实体还包括分别与气助雾化喷嘴7相连的气路和油路,油路上依次设置有油箱1、油泵2、燃油加热器3和燃油压力表5,气路上设置有辅助气体气瓶10,油路和气路之间连接有油气压力调节装置4;气助雾化喷嘴7中还设有油气轨6;定容弹8底部设有空气压缩机9、排气阀11和压力表12,定容弹8上还设有加热器和温度传感器;激光粒径分析仪通过定容弹8的可视窗获取喷雾颗粒的SMD数据,定容弹8上的水平4个方向(前后左右)均开有视窗,激光粒径分析仪的发射端13与接收端14在定容弹8两侧水平对置。
如图3所示,上述喷油嘴电磁阀驱动回路和喷气嘴电磁阀驱动回路采用相同结构的峰值-保持电流型驱动回路,峰值-保持电流型驱动回路的驱动控制过程中有三路驱动信号:高侧高压驱动信号、高侧低压驱动信号以及低侧驱动信号,其中低侧驱动信号的脉宽与喷射脉宽的大小相等,在整个控制喷嘴喷射过程中都处于高电平;三路驱动信号驱动各自对应的MOS管,当驱动信号处于高电平时,MOS管导通,驱动信号处于低电平时,MOS管截止;驱动控制过程中,喷油嘴先开始驱动,经过时长为油气喷射间隔变量t
对于图3和图4的附图标记,MOS管栅极一侧标注的数字1~6依次是指喷油嘴高侧高压驱动信号、喷油嘴高侧低压驱动信号、喷油嘴低侧驱动信号、喷气嘴高侧高压驱动信号、喷气嘴高侧低压驱动信号以及喷气嘴低侧驱动信号。
如图5所示,本实施例中电磁阀驱动回路和喷气嘴电磁阀驱动回路的参数建模过程一致,包括五个阶段及四个回路。
以喷油嘴为例,第一阶段为驱动电流快速上升阶段,此时高侧高压驱动信号与低侧驱动信号均处于高电平,侧低压驱动信号处于低电平,在该阶段仅有第1回路生效,回路等效为高侧高压电源、高侧高压MOS管Q1,电磁阀内阻、电磁阀线圈、侧MOS管Q3以及功率地PGND依次串联,通过对应公式计算得到第一阶段结束时电流的数值i
其中,喷油嘴电磁阀驱动回路的参数建模过程如下:
第一阶段为驱动电流快速上升阶段,此时喷油嘴高侧高压驱动信号与喷油嘴低侧驱动信号均处于高电平,喷油嘴高侧低压驱动信号处于低电平,持续时间为t
求解微分方程,其中根据初始条件求解得到电流与时间的关系为:
将持续时间t
第二阶段为驱动电流缓慢上升至峰值阶段,此时喷油嘴高侧高压驱动信号通过PWM波进行直流斩波,喷油嘴低侧驱动信号处于高电平,喷油嘴高侧低压驱动信号处于低电平;PWM波持续时间为t
第二阶段中当喷油嘴高侧高压驱动信号处于高电平时则为上述第1回路,当喷油嘴高侧高压驱动信号处于低电平时,则形成第2回路,第2回路中二极管D1、喷油嘴电磁阀内阻、喷油嘴电磁阀线圈形成续流回路;第2回路等效为功率地PGND、二极管D1、喷油嘴电磁阀内阻、喷油嘴电磁阀线圈、喷油嘴低侧MOS管Q3、功率地PGND依次串联;其中二极管D1的导通压降为U
假设在第二阶段中,喷油嘴高侧高压驱动信号通过PWM共输出高低电平组合n
将低电平时间
同时,根据第1回路电流上升公式以及初始条件,将高电平时间
进而得到第二阶段中电流每经过一次高低电平组合的递推关系为:
根据递推法递推n
第三阶段为驱动电流快速下降阶段,此时喷油嘴高侧高压驱动信号以及喷油嘴高侧低压驱动信号均处于低电平,喷油嘴低侧驱动信号处于高电平,持续时间为t
第四阶段为电流缓慢下降阶段,此时喷油嘴高侧低压驱动信号通过PWM进行直流斩波,喷油嘴高侧高压驱动信号处于低电平,喷油嘴低侧驱动信号处于高电平,PWM波持续时间为t
假设在第四阶段中,喷油嘴高侧低压驱动信号通过PWM共输出高低电平组合n
将高电平时间
同时根据第2回路电流下降公式以及初始条件,将低电平时间
进而得到第四阶段中电流每经过一次高低电平组合的递推关系为:
根据递推法递推n
第五阶段为电流快速消失阶段,当喷油嘴高侧高压驱动信号、喷油嘴高侧低压驱动信号、喷油嘴低侧驱动信号全部为低电平,且电流将快速下降直至消失,形成第4回路;第4回路等效为功率地PGND、二极管D1、喷油嘴电磁阀内阻、喷油嘴电磁阀线圈、二极管D3、机载电源依次串联;二极管D3的导通压降为U
求解微分方程,其中根据初始条件求解得到电流与时间的关系为:
电流下降到0所需的时间为:
其中,喷气嘴电磁阀驱动回路的参数建模过程如下:
第一阶段为驱动电流快速上升阶段,此时喷气嘴高侧高压驱动信号与喷气嘴低侧驱动信号均处于高电平,喷气嘴高侧低压驱动信号处于低电平,持续时间为T
求解微分方程,其中根据初始条件求解得到电流与时间的关系为:
将持续时间T
第二阶段为驱动电流缓慢上升至峰值阶段,此时喷气嘴高侧高压驱动信号通过PWM波进行直流斩波,喷气嘴低侧驱动信号处于高电平,喷气嘴高侧低压驱动信号处于低电平;PWM波持续时间为T
第二阶段中当喷气嘴高侧高压驱动信号处于高电平时则为上述第1回路,当喷气嘴高侧高压驱动信号处于低电平时,则形成第2回路,第2回路中二极管D4、喷气嘴电磁阀内阻、喷气电磁阀线圈形成续流回路,第2回路等效为功率地PGND、二极管D4、喷气嘴电磁阀内阻、喷气嘴电磁阀线圈、喷气嘴低侧MOS管Q6、功率地PGND依次串联;其中二极管D4的导通压降也为U
假设在第二阶段中,喷气嘴高侧高压驱动信号通过PWM共输出高低电平组合N
将低电平时间
同时,根据第1回路电流上升公式以及初始条件,将高电平时间
进而得到第二阶段中电流每经过一次高低电平组合的递推关系为:
根据递推法递推N
第三阶段为驱动电流快速下降阶段,此时喷气嘴高侧高压驱动信号以及喷气嘴高侧低压驱动信号均处于低电平,喷气嘴低侧驱动信号处于高电平,持续时间为T
第四阶段为电流缓慢下降阶段,此时喷气嘴高侧低压驱动信号通过PWM进行直流斩波,喷气嘴高侧高压驱动信号处于低电平,喷气嘴低侧驱动信号处于高电平,PWM波持续时间为T
假设在第四阶段中,喷气嘴高侧低压驱动信号通过PWM共输出高低电平组合N
将高电平时间
同时根据第2回路电流下降公式以及初始条件,将低电平时间
进而得到第四阶段中电流每经过一次高低电平组合的递推关系为:
根据递推法递推N
第五阶段为电流快速消失阶段,当喷气嘴高侧高压驱动信号、喷气嘴高侧低压驱动信号、喷气嘴低侧驱动信号全部为低电平,且电流将快速下降直至消失,形成第4回路;第4回路等效为功率地PGND、二极管D4、喷气嘴电磁阀内阻、喷气嘴电磁阀线圈、二极管D6、机载电源依次串联;二极管D6的导通压降也为U
求解微分方程,其中根据初始条件求解得到电流与时间的关系为:
电流下降到0所需的时间为:
如图5所示,本实施例在所述喷射优化之前,对下述时间变量进行约束以限制取值范围:喷油嘴驱动时间变量t
对于喷油嘴电磁阀,整个喷油过程的时间长短由喷油嘴喷射脉宽t
t
当电流达到一定数值时喷油嘴电磁阀线圈将开始移动,将线圈开始移动时的电流定为喷油嘴阈值电流i
则为保证在电流上升过程中喷油嘴可以顺利开启需要有约束:
t
对于t
峰值-保持的电流型驱动方案中电流在保持阶段需要大于喷油嘴阈值电流i
i
在驱动信号停止之后,电流需要一定时间下降至0,为保证喷油嘴精度,需要尽量减少喷油嘴的关闭延迟,因此设置约束时间t
t
对于喷气嘴电磁阀,整个喷油过程的时间长短由喷气嘴喷射脉宽T
T
当电流达到一定数值时喷气嘴电磁阀线圈将开始移动,将线圈开始移动时的电流定为喷气嘴阈值电流I
则为保证在电流上升过程中喷气嘴可以顺利开启需要有约束:
T
对于T
峰值-保持的电流型驱动方案中电流在保持阶段需要大于喷气嘴阈值电流I
I
在驱动信号停止之后,电流需要一定时间下降至0,为保证喷气嘴精度,需要尽量减少喷气嘴的关闭延迟,因此设置约束时间T
T
对于对油气喷射间隔变量t
如图6所示,自适应遗传算法优化的具体过程如下:
S1.1、对种群进行初始化和编码,要求个体的生成精度为1us,初始化数目为N的种群,将9个时间变量编码为二进制,依次连接成一个长二进制串后按照种群规模N和约束条件形成初始种群;
S1.2、将种群中的个体依次传送到驱动回路的控制单元,数据处理后作为驱动参数驱动气助雾化喷嘴7喷射并进行SMD的测量,此处优化问题中优化目标为SMD,将适应度定为所测量SMD的相反数;所测量的数值通过喷雾试验台架中的激光粒径分析仪传送到计算机中处理保存后再被读取,当代所有个体的适应度值全部被读取之后进入步骤S1.3;
S1.3、将各适应度排序之后以轮盘赌的方式对个体进行选择,将选中的个体复制到新的种群中,由于适应度为所测量SMD的相反数,为负数值,因此需要通过改进公式计算每个个体的选择概率,改进公式如下:
其中,f
当个体适应度接近当代种群的最大适应度时,认为该个体性能较好,采用较低的到交叉概率和变异概率,保证其优良性;当个体适应度低于当前代数种群平均适应度时,认为该个体的性能不佳,采用较高的交叉概率和变异概率,加快个体更新速度;
其中f为待变异个体的适应度数值,f
S1.4、经过选择、交叉、变异之后形成下一代的新种群,若迭代次数Gen未达到指定代数G,则增加1次迭代次数后返回执行步骤S1.2,否则终止计算,计算结束之后将适应度最高的个体取出并进行解码,获得最优的时间变量组合,同时适应度值的相反数为最佳SMD。
如图7所示,步骤S1.2中驱动回路控制单元的执行步骤如下:
(1)、接收到通信信号进入中断程序处理,此时将通信标志位设置为0,不可再接收数据,所接收到的个体数据,对9个时间变量进行设置,此处9个时间变量是指喷油嘴驱动时间变量t
(2)、设置结束后驱动气助雾化喷嘴7进行喷射,为保证激光粒径分析仪数据分析的准确性,进行n
(3)、多段喷射结束后进入个体间隔时间t
(4)、进入主函数循环,直至接收到通信信号则重复(1)至(4)步骤。
如图8所示,步骤S1.2中的数据处理程序在激光粒径分析仪第一次测量到燃油液滴时,开始执行,具体数据处理过程如下:
(a)、对气助雾化喷嘴7喷射出的燃油液滴进行采样,保存采样数据至个体文件夹,文件夹命名为“迭代代数Gen+个体序号n”的方式命名;
(b)、当经过时间t
其中d
(c)、重复S3.1步骤并将文件夹命名中的个体序号n更新,当已经处理的个体数量到达种群规模N时,认为该代个体喷射结果的SMD全部计算完成,重复(a)步骤时,将文件夹命名中的迭代代数Gen更新;
当处理的代数到达设定代数G并且已经处理的个体数量达到种群规模N时,所有数据处理完毕后,退出处理程序。
- 一种基于数字孪生的风机直驱变桨距系统及优化设计方法
- 一种集成气助式尿素喷射系统
- 一种基于数字孪生的装配精度仿真分析方法与系统
- 一种基于数字孪生的喷射混凝土施工优化系统
- 基于数字孪生模型的喷射泵供热系统自主优化调控方法