一种电子皮肤感测模块及机械臂
文献发布时间:2024-01-17 01:24:51
技术领域
本发明涉及机械臂感测技术领域,尤其涉及一种电子皮肤感测模块及机械臂。
背景技术
近些年来随着机器学习、人工智能等技术的发展与应用,仿生机器人作为更先进的生产力,不仅引起了学界的广泛关注与研究,而且在工业界也发挥着不可替代的作用。仿生机器人以人作为研究的范例,在视觉和听觉方面的研究已经相当成熟。然而,触觉作为人体分布最广、最基本的感觉,使仿生机器人在工业现场中获得良好的触觉感知能力,是目前学界与工业界亟需解决的难题。
目前的机器人电子皮肤结构仍存在诸多不足,主要体现在以下方面:目前的研究主要集中在法向力的测量上,而忽略了其他模态的信息;电子皮肤的信息传输是基于时钟,传输效率较低。
发明内容
本发明的目的在于提出一种触觉感知精准,实现皮肤面模拟感测的电子皮肤感测模块及机械臂。
为达到上述目的,本发明提出一种电子皮肤感测模块,包括硅制芯片基底、接近传感器、三轴加速度计、温度传感器、法向力传感器和微控制器;
所述接近传感器、三轴加速度计、温度传感器、法向力传感器和微控制器均设于所述硅制芯片基底上,所述接近传感器、三轴加速度计、温度传感器和法向力传感器均与所述微控制器信号连接。
进一步的,所述硅制芯片基底为六边形结构,在所述硅制芯片基底的边缘设有多个通信端口。
进一步的,每个所述通信端口为四根非交叉导线的数据传输模式,其中,两根为数据传输线、两根为电源线。
进一步的,所述微控制器本地执行多种信号处理算法,包括低通滤波或阈值化。
进一步的,所述硅制芯片基底上还设有本地内存,所述本地内存存储传感器校准值、本地设置和唯一的单元标识符。
进一步的,各感知单元通过事件驱动的方式进行数据传输,只有感知到外界的接近或者碰撞事件时,才会进行数据传输,对模拟输入信号x(t)的导数
进一步的,所述接近传感器为有源光学接近传感器,通过测量反射红外光的量来感知物体的接近。
进一步的,所述三轴加速度计通过机械臂的开环运动,自动地获取关节运动学信息。
本发明还提出一种机械臂,围绕机械臂的外周等间距均匀布置所述电子皮肤感测模块,多个所述电子皮肤感测模块之间通过通信端口实现信号连接;
所述电子皮肤感测模块外通过3D打印的塑料外壳包裹进行包括,所述外壳通过卡扣与机械臂固定连接。
与现有技术相比,本发明的优势之处在于:
1、本发明的电子皮肤感测模块包括接近传感器、三轴加速度计、温度传感器和法向力传感器,可以识别物体的接近、法相接触力的大小、三轴加速度和表面温度,为机械臂提供更精密的感知效果。
2、本发明的电子皮肤感测模块主要采用等边六边形的设计,便于在机械米上精密排布以及排线。
3、本发明的电子皮肤感测模块的感知单元通过事件驱动的方式进行数据传输,这样可以减少数据通讯量,降低系统能耗。
附图说明
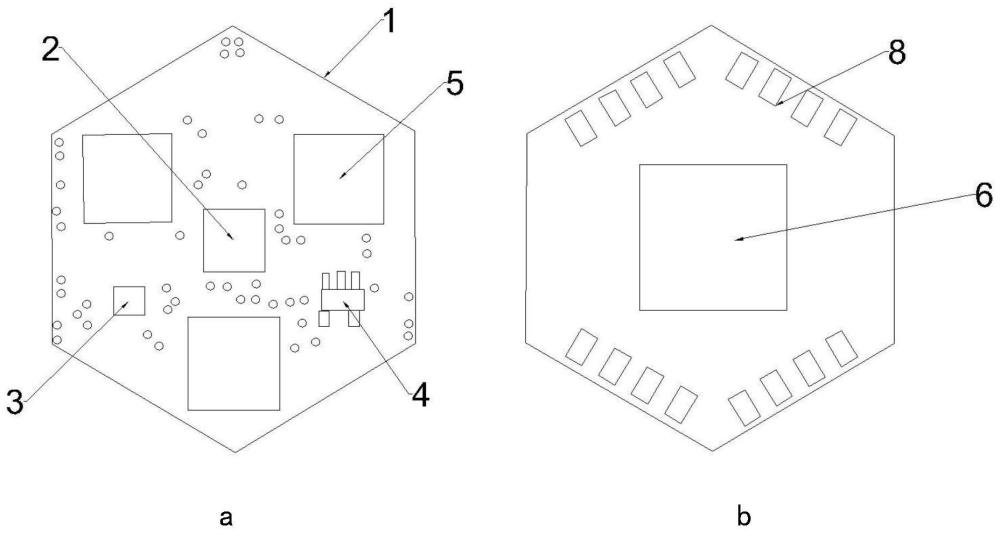
图1为本发明实施例中电子皮肤感测模块的正反面结构示意图;
图2为本发明实施例中电子皮肤感测模块的通信方法示意图;
图3为本发明实施例中安装有电子皮肤感测模块的机械臂结构示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案作进一步地说明。
如图1所示,本发明提出一种模块化的电子皮肤结构,具体为图1所示,包括若干个皮肤感知单元。硅制芯片基底1的形状为六边形,设有接近传感器2、三轴加速度计3、温度传感器4、法向力传感器5和微控制器6;
如图1所示,图1a为电子皮肤感测模块的正面示意图,图1b为电子皮肤感测模块的背面示意图;接近传感器2、三轴加速度计3、温度传感器4、法向力传感器5和微控制器6均设于所述硅制芯片基底1上,接近传感器2、三轴加速度计3、温度传感器4和法向力传感器5均与所述微控制器6信号连接。因此,皮肤单元的感知能力是多模态的,能够识别物体的接近、法相接触力的大小、三轴加速度与表面温度。
其中,接近传感器2为一个有源光学接近传感器2,通过测量反射红外光的量来感知物体的接近。因为人类皮肤可以感知最轻微的触摸,而物理传感器很难做到这一点,所以接近的距离视为触摸检测的补充,并且拥有在接触前进行反应的能力;三轴加速度计3可以测量振动、运动加速度和朝向重力的方向。在每个感知单元中使用三轴加速度计3的最大特点是通过机械臂的开环运动,自动地获取关节运动学信息;温度传感器4用来感知周围热量,因为环境本身的温度差可以用来检测触觉特性,比如通过热传递速率对材料进行分类;法向力传感器5用来模拟人体对接触力的感知能力。
在本实施例中,感测模块的部分信号处理算法,如低通滤波或阈值化,直接在本地执行。这降低了数据包的重复频率和/或长度,从而减少了网络和高级处理负载。本地内存用于永久存储传感器校准值、本地设置和唯一的单元标识符(I D)。
在本实施例中,感知单元设计为等边六边形。该设计方案允许感知单元与周围所有感知单元建立数据交互通道,且任意相邻等边六边形之间的距离是相等的,方便进行排线,且电子皮肤感测模块的每条边都有通信端口8,信号传输方式如图2所示,每个通信端口为四根非交叉导线的数据传输模式,其中两根为数据传输线、两根为电源线。因为感知单元之间形成了网格型的拓扑结构,但传感器发生故障时,整个皮肤模块的功能并不会因此而失效,从而具有了一定的鲁棒性。
在本实施例中,电子皮肤感测模块通过事件驱动的方式进行数据传输。只有感知到外界的接近或者碰撞事件时,才会进行数据传输,这样可以减少数据通讯量,降低系统能耗。将所有这些传感器都视为理想的事件驱动传感器,并采用近似相同的信号传导机制。它们对模拟输入信号x(t)的导数
在本实施例中,如图3所示,为一个装载有皮肤感测模块的机械臂,电子皮肤模块由3D打印的塑料外壳7包裹,并安装在UR3机械臂上。为了皮肤模块能够比较容易地安装与拆除,塑料外壳7的设计必须简单而通用。外壳7通过卡扣与机械臂进行固定。因为感知单元是刚性的,不容易附着在具有小区率半径的表面。因此用塑料外壳7将感知单元包裹,可靠地附着在机械臂上。
上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。
- 投影镜头系统、投影装置、感测模块及电子装置
- 一种感测装置、感测方法及设备
- 一种指纹感测电路及指纹感测装置
- 一种模块化的全柔性机械臂
- 对电子设备的触摸感测模块进行控制的方法、电子设备、对设置在电子设备中的触摸感测模块进行操作的方法以及触摸感测模块
- 具有电子感测模块的床垫及电子感测模块