一种基于速度规划的喷管作动筒运动控制方法
文献发布时间:2024-01-17 01:24:51
技术领域
本申请属于发动机控制技术领域,具体涉及一种基于速度规划的喷管作动筒运动控制方法。
背景技术
某型发动机的单边膨胀喷管的喷口喉道面积控制,采用液压位置伺服系统驱动双支作动筒完成。根据设计指标,完成伺服系统液压缸的计算,在最大负载力200000N的要求下,根据运动的速度要求,油缸直径达到120mm左右,流量在300L/min。由于执行机构的惯性比较大,为达到设计的速度要求,避免超调量过大,需要对作动筒的运动轨迹进行规划,保证系统的平稳运动。
现有技术一般采用PID控制,缺少速度规划,在伺服系统惯性较大的情况下,容易造成瞬时加速度过大问题,对发动机的结构造成损伤。
发明内容
为了解决上述问题,本申请提供一种基于速度规划的喷管作动筒运动控制方法,在控制器中根据作动筒当前位置和给定位置进行速度规划,计算出喷管运行的每个运算周期的轨迹,根据计算轨迹对作动筒进行控制。
本申请基于速度规划的喷管作动筒运动控制方法,主要包括:
步骤S1、设定喷管作动筒具有加速阶段、减速阶段及可选的匀速阶段,所述加速阶段包括加加速段、减加速段及可选的匀加速段,所述减速阶段包括加减速段、减减速段及可选的匀减速段,设定加加速段运行时间为T
步骤S2、获取给定的约束参数及输入参数,所述约束参数包括全程最大速度V
步骤S3、以所有约束参数作为输入值,计算不包含匀速段的其他所有阶段的时间T
步骤S4、比较理论位移S与需求位移‖s1-s2‖的大小,当需求位移‖s1-s2‖大于等于理论位移S时,根据差值‖s1-s2‖-S确定匀速段运行时间T
步骤S5、以实际最大速度V
步骤S6、根据各阶段的时间控制作动筒运动。
优选的是,步骤S4中,计算实际最大速度包括:
步骤S41、判断起始点速度V
步骤S42、当起始点速度V
步骤S43、当起始点速度V
优选的是,步骤S42中,确定实际最大速度V
以满足最大减速度d
当第一理论位移S1小于需求位移‖s1-s2‖时,则存在匀减速段,在存在匀减速段且设定实际最大速度为V
当第一理论位移S1大于需求位移‖s1-s2‖时,则假设的完全不存在匀减速段正确,此时假设完全不存在匀加速段,在最大加速度达到约束值的前提下计算第二最大速度V
优选的是,步骤S43中,确定实际最大速度V
以满足最大加速度a
当第三理论位移S3小于需求位移‖s1-s2‖时,则存在匀加速段,在存在匀加速段且设定实际最大速度为V
当第三理论位移S3大于需求位移‖s1-s2‖时,则假设的完全不存在匀加速段正确,此时假设完全不存在匀减速段,在最大减速度达到约束值的前提下计算第四最大速度V
5、如权利要求3或4所述的基于速度规划的喷管作动筒运动控制方法,其特征在于,在设定区间内通过二分法解算实际最大速度V
本申请能够减小瞬时加速度对发动机硬件造成的冲击。
附图说明
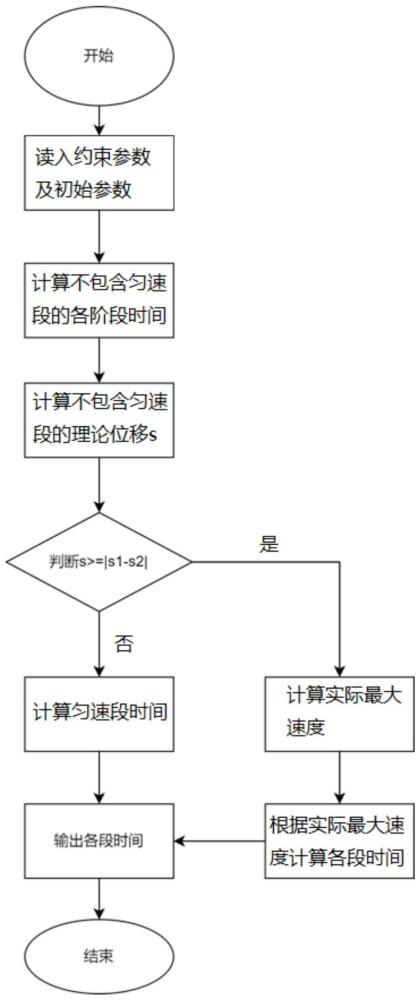
图1为本申请基于速度规划的喷管作动筒运动控制方法一优选实施例的流程图。
图2为本申请基于速度规划的喷管作动筒运动控制方法的速度分段示意图。
具体实施方式
为使本申请实施的目的、技术方案和优点更加清楚,下面将结合本申请实施方式中的附图,对本申请实施方式中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施方式是本申请一部分实施方式,而不是全部的实施方式。下面通过参考附图描述的实施方式是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。基于本申请中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本申请保护的范围。下面结合附图对本申请的实施方式进行详细说明。
本申请提供了一种基于速度规划的喷管作动筒运动控制方法,如图1所示,主要包括:
步骤S1、设定喷管作动筒具有加速阶段、减速阶段及可选的匀速阶段,所述加速阶段包括加加速段、减加速段及可选的匀加速段,所述减速阶段包括加减速段、减减速段及可选的匀减速段,设定加加速段运行时间为T
如图2所示,加加速段、减加速段、加减速段、减减速段为必须时间段,其他三个时间段根据需要进行调整。
步骤S2、获取给定的约束参数及输入参数,所述约束参数包括全程最大速度V
在该步骤中,根据喷口喉道面积A8的控制技术要求,全程的打开和关闭的时间设计硬件,再根据硬件的能力确定伺服系统的最大速度、最大加速度和最大减速度,以此作为约束条件,其中,最大加加速度j
步骤S3、以所有约束参数作为输入值,计算不包含匀速段的其他所有阶段的时间T
在该步骤中,以所有约束参数作为输入值是指所有参数均达到最大值,例如通过加加速段、匀加速段、减加速段将速度从起始点速度V
进一步的,可以推导出不包含匀速段的理论位移S为:
步骤S4、比较理论位移S与需求位移‖s1-s2‖的大小,当需求位移‖s1-s2‖大于等于理论位移S时,根据差值‖s1-s2‖-S确定匀速段运行时间T
在该步骤中,如果需求位移‖s1-s2‖大于理论位移S,则可知伺服系统存在匀速段,可以求出:
如果需求位移‖s1-s2‖等于理论位移S,则可知伺服系统刚好不存在匀速段,但是速度刚好可达Vmax,可以求出T
如果需求位移‖s1-s2‖小于理论位移S,则表明按照目前的最大加速度a
在一些可选实施方式中,步骤S4中,计算实际最大速度包括:
步骤S41、判断起始点速度V
步骤S42、当起始点速度V
步骤S43、当起始点速度V
需要说明的是,由于需求位移值是固定的,在扣除了匀速段之后,所计算的实际位移仍然大于需求位移,在此基础上,需要继续扣除匀加速段或者匀减速段,或者使这两个阶段的时间减小,具体的,本申请通过比较起始点速度V
在一些可选实施方式中,步骤S42中,确定实际最大速度V
步骤S421、以满足最大减速度d
该步骤中,如果V
假设不包含匀减速段,最大减速度d
如果S1=‖s1-s2‖,则说明伺服系统不存在匀减速段,实际最大速度V
步骤S422、当第一理论位移S1小于需求位移‖s1-s2‖时,则存在匀减速段,在存在匀减速段且设定实际最大速度为V
该步骤中,实际最大速度V
据此,可以求解出实际的最大速度V
进一步的根据式1-4即可获得各段时间。
步骤S423、当第一理论位移S1大于需求位移‖s1-s2‖时,则假设的完全不存在匀减速段正确,此时假设完全不存在匀加速段,在最大加速度达到约束值的前提下计算第二最大速度V
在该步骤中,如果S1>‖s1-s2‖,则说明伺服系统不存在匀减速段,并且伺服系统实际最大速度小于V
此时,需要分为两种情况,比较第二最大速度Vmax2与终点速度V2,具体的:
(1)如果V
将上式代入算式5,可以得到关于v
(2)如果V
S2=(V
之后需要进一步分为两种情况进行判断,第一种情况下,如果S2≥‖s1-s2‖,说明伺服系统不存在匀加速段,设伺服系统的实际最大速度为v
将上式带入算式5,可推导出关于v
其中,
第二种情况下,如果S2<‖s1-s2‖,则伺服系统存在匀加速段,可以按照式11进行计算。
在一些可选实施方式中,步骤S43中,确定实际最大速度V
步骤S431、以满足最大加速度a
该步骤中,如果V
如果S3=‖s1-s2‖,则表明伺服系统不存在匀加速段,V
步骤S432、当第三理论位移S3小于需求位移‖s1-s2‖时,则存在匀加速段,在存在匀加速段且设定实际最大速度为V
该步骤中,如果S3<‖s1-s2‖,则说明伺服系统存在匀加速段,同时由于加速时间小于减速时间则也存在匀减速段,可利用算式7求解。
步骤S433、当第三理论位移S3大于需求位移‖s1-s2‖时,则假设的完全不存在匀加速段正确,此时假设完全不存在匀减速段,在最大减速度达到约束值的前提下计算第四最大速度V
该步骤中,如果S3>‖s1-s2‖,则伺服系统不含匀加速段,假设不含匀减速段,且可以达到最大减速度,此时需要求解第四最大速度V
第一种情况下,如果S4≥‖s1-s2‖,说明伺服系统不包含匀减速段,也不存在匀加速段,设此时的最大速度为v
将上式带入算式5,可得到方程如下:
其中,
第二种情况下,如果S2<‖s1-s2‖,则伺服系统存在匀减速段,但不存在匀加速段,各时间段计算如下:
将上式带入算式5,可以推导出方程如下:
其中,
步骤S5、以实际最大速度V
步骤S6、根据各阶段的时间控制作动筒运动。
在一些可选实施方式中,在设定区间内通过二分法解算实际最大速度V
虽然,上文中已经用一般性说明及具体实施方案对本申请作了详尽的描述,但在本申请基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本申请精神的基础上所做的这些修改或改进,均属于本申请要求保护的范围。
- 航空发动机滚转喷管作动筒控制与测量装置及方法
- 航空发动机滚转喷管作动筒控制与测量装置及方法