夹紧力控制与速比控制耦合的无级变速器滑移控制装置
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及一种夹紧力控制与速比控制耦合的无级变速器滑移控制装置。
背景技术
金属带式CVT是一种摩擦传动的装置,通过从动带轮提供的夹紧力,使得金属片与带轮之间产生摩擦力,金属片在摩擦力的作用下使相邻摩擦片间产生挤压推力,进而实现转矩由主动轮向从动轮的传递。然而,在无级变速器转矩传动过程中,冗余夹紧力会造成金属片与带轮之间产生较大的摩擦损耗。通过控制夹紧力使金属片与带轮间保持一定的相对滑移,可以减小带轮夹紧力,从而减少液压损失,同时又能改善金属带与带轮间的摩擦特性,提高传动效率。但是,如果当夹紧力太小的话,意味着金属带与带轮之间的滑移率会很大,这样虽然可以在一定程度上减少金属片与带轮的摩擦磨损,起到保护金属片的作用,却会使得发动机的输出扭矩无法被可靠、高效地传递,同时由于变速器对外界的负载的波动极其敏感,会导致夹紧力不足达不到转矩传递要求从而出现宏观滑移,变速机构就非常容易损坏。而如果夹紧力太大的话,意味着金属带与带轮之间的滑移率会很小,这样虽然可以提高了无级变速器的传递效率,却增大了金属带与带轮的摩擦损失,降低金属带及带轮寿命,同时液压系统也要输出更大的流量来提供更大的液压夹紧力,从而增大了变速机构的液压损失。
相关的发明已有些实例,但都与本发明有本质的区别,在已有的控制CVT速比装置的技术方案中,如“泵控CVT电液控制系统”(CN102494128A)、 “一种液压机械无级变速器速比调节自动控制系统”(CN108506482A)、“一种液压机械无级变速器速比调节自动控制装置(CN108506482A)”以及“一种高速开关阀先导控制的无级变速器电液控制系统(CN110425276A)”,第一个装置提出的技术:CVT液压系统仅仅通过一个油泵的正反转来实现速比的变化,然再通过一个补油泵来实现夹紧力的控制,而未采用其他阀控元件,这虽然减少了溢流损失,但是该装置的速比控制精度十分低,并且夹紧力控制十分不稳定;第二和第三个装置提出的技术: CVT液压系统采用了双泵调节,并使用高速开关阀来控制主从动轮液压缸的压力,结构虽然简单,也能实现对CVT速比和夹紧力的快速控制,但是该装置的速比控制液压回路和夹紧力控制液压回路是完全独立的液压回路,没有考虑速比控制回路与夹紧力控制回路的耦合作用;第四个装置采用定量泵、先导泵以及HSV高速开关阀来控制CVT的夹紧力控制回路和速比控制回路,可以提高CVT的控制精度和响应速度,但是该装置的速比控制液压回路和夹紧力控制液压回路也是完全独立的液压回路,也没有考虑速比控制回路与夹紧力控制回路的耦合作用,并且本装置采用的HSV高速开关阀制造成本很高,制造难度也非常大,因此很难进行批量生产。
发明内容
为了解决上述技术问题,本发明提供一种能扩大速比变化率的可控范围,实现无级变速器始终维持在最佳滑移区间,减小带轮夹紧力,从而减少液压损失,提高传动效率,加长金属带的疲劳寿命,同时也能避免由于车辆行驶工况突变而造成无级变速器抖动现象的一种利用夹紧力控制与速比控制耦合的无级变速器滑移控制装置。
本发明采用的技术方案是:一种夹紧力控制与速比控制耦合的无级变速器滑移控制装置,包括无级变速器、液压装置及电子控制单元,所述的无级变速器包括主动轮、从动轮和金属带,主动轮包括可动锥轮Ⅰ和固定锥轮Ⅰ,从动轮包括可动锥轮Ⅱ和固定锥轮Ⅱ,可动锥轮Ⅰ和可动锥轮Ⅱ上均设有速度传感器;
所述的液压装置包括速比控制液压回路和夹紧力控制液压回路;所述的速比控制液压回路包括油箱、泵、单向阀Ⅰ、第一先导型比例电磁减压阀、第二先导型比例电磁减压阀、第一溢流阀及电机驱动器;泵与电机连接;泵的进油口与油箱连通,泵的出油口通过进油管连接第一先导型比例电磁减压阀的进油口P1,进油管通过管道与第一溢流阀的进油口连接;第一先导型比例电磁减压阀的出油口A1通过油管I与主动轮的液压缸连接;油管I通过管道连接第二先导型比例电磁减压阀的进油口A2,该管道上设有蓄能器I;第一溢流阀的出口连接单向阀I的进口,单向阀I的出口通过油管Ⅱ连回油箱,第二先导型比例电磁减压阀的出油口A2通过管道连接油管Ⅱ;
所述夹紧力控制液压回路包单向阀Ⅱ、第三先导型比例电磁减压阀、第四先导型比例电磁减压阀及第二溢流阀;所述的进油管连接第三先导型比例电磁减压阀的进油口P3,第三先导型比例电磁减压阀的出油口A3通过油管Ⅲ连接从动轮的液压缸,油管Ⅲ通过管道连接第四先导型比例电磁减压阀的进油口P4,该管道上设有蓄能器Ⅱ;进油管通过管道与第二溢流阀的进油口连接,第二溢流阀的出口连接单向阀Ⅱ的进口,单向阀Ⅱ的出口通过油管Ⅳ连回油箱;第四先导型比例电磁减压阀的出油口A4连接油管Ⅳ;
第一先导型比例电磁减压阀的外控口D1、第二先导型比例电磁减压阀的外控口D2与第三先导型比例电磁减压阀的出油口A3连通;第三先导型比例电磁减压阀的外控口D3、第四先导型比例电磁减压阀的外控口D4与第一先导型比例电磁减压阀的出油口A1连通;速度传感器、电机驱动器、第一先导型比例电磁减压阀、第二先导型比例电磁减压阀、第三先导型比例电磁减压阀和第四先导型比例电磁减压阀分别与电子控制单元连接;电机驱动器与电机连接。
上述的夹紧力控制与速比控制耦合的无级变速器滑移控制装置中,泵进油口与油箱连接的管道上设有过滤器。
上述的夹紧力控制与速比控制耦合的无级变速器滑移控制装置中,所述的油管Ⅱ和油管Ⅳ上分别设有冷却器I和冷却器Ⅱ。
上述的夹紧力控制与速比控制耦合的无级变速器滑移控制装置中,油管I与第二先导型比例电磁减压阀的进油口A2连通的管道上设有压力传感器I;油管Ⅲ与第四先导型比例电磁减压阀的进油口P4连接的管道上设有压力传感器Ⅱ;压力传感器I、压力传感器Ⅱ分别与电子控制单元连接。
上述的夹紧力控制与速比控制耦合的无级变速器滑移控制装置中,所述的泵采用的是额定压力为6MPa的齿轮泵。
与现有技术相比,本发明的有益效果是:
本发明结构简单,制造成本低;本发明在速比控制精度与夹紧力控制精度高,响应速度快,容易实现精确实时控制;本发明主动利用夹紧力控制与速比控制之间的耦合作用,在保证夹紧力安全的基础上,通过联合调节主、从动轮油缸压力来干预速比控制,扩大速比变化率的可控范围,可以实现无级变速器始终维持在最佳滑移区间,减小带轮夹紧力,从而减少液压损失,提高传动效率,提高了金属带的疲劳寿命,同时也能避免由于车辆行驶工况突变而造成无级变速器抖动的现象。
附图说明
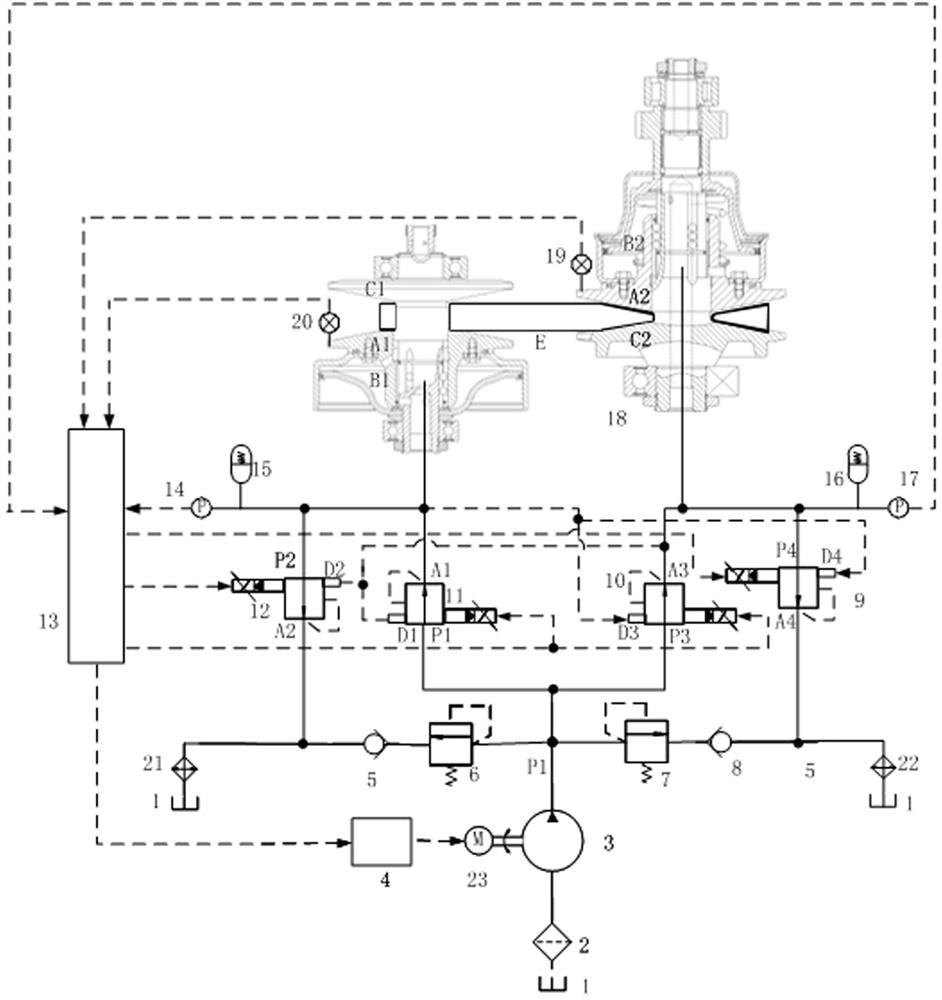
图1为本发明的结构图。
具体实施方式
下面结合附图对本发明作进一步说明。
如图1所示,本发明包括无级变速器、液压装置及电子控制单元。所述的无级变速器18包括主动轮、从动轮和金属带E,主动轮包括可动锥轮A1和固定锥轮C1,从动轮包括可动锥轮A2和固定锥轮C2。主动轮的可动锥轮A1上设有速度传感器20,从动轮的可动锥轮A2上设有速度传感器19。
所述的液压装置包括速比控制液压回路和夹紧力控制液压回路。所述的速比控制液压回路包括油箱1、泵3、冷却器Ⅰ21、单向阀Ⅰ5、第一先导型比例电磁减压阀11、第二先导型比例电磁减压阀12、第一溢流阀6及电机驱动器4;泵3与电机23连接;泵3的进油口通过该管道与油箱1连通,该管道上设有过滤器2。泵3的出油口通过进油管连接第一先导型比例电磁减压阀11的进油口P1,进油管通过管道与第一溢流阀6的进油口连接,第一先导型比例电磁减压阀11的出油口A1通过油管I与主动轮的液压缸B1连接。油管I通过管道连接第二先导型比例电磁减压阀12的进油口A2,该管道上设有蓄能器I15和压力传感器I14。第一溢流阀6的出口连接单向阀I5的进口,单向阀I5的出口通过油管Ⅱ连回油箱1,油管Ⅱ上设有冷却器Ⅰ21,第二先导型比例电磁减压阀12的出油口A2通过管道连接油管Ⅱ。
所述夹紧力控制液压回路包单向阀Ⅱ8、第三先导型比例电磁减压阀10、第四先导型比例电磁减压阀9及第二溢流阀7。所述的进油管连接第三先导型比例电磁减压阀10的进油口P3,第三先导型比例电磁减压阀10的出油口A3通过油管Ⅲ连接从动轮的液压缸B2,油管Ⅲ通过管道连接第四先导型比例电磁减压阀9的进油口P4,该管道上设有蓄能器Ⅱ16和压力传感器Ⅱ17。进油管通过管道与第二溢流阀7的进油口连接,第二溢流阀7的出口连接单向阀Ⅱ8的进口,单向阀Ⅱ8的出口通过油管Ⅳ连回油箱1,油管Ⅳ上设有冷却器Ⅱ22。第四先导型比例电磁减压阀的出油口A4连接油管Ⅳ。
第一先导型比例电磁减压阀11的外控口D1、第二先导型比例电磁减压阀12的外控口D2与第三先导型比例电磁减压阀10的出油口A3连通。第三先导型比例电磁减压阀10的外控口D3、第四先导型比例电磁减压阀09的外控口D4与第一先导型比例电磁减压阀11的出油口A1连通。速度传感器19、速度传感器20、电机驱动器4、第一先导型比例电磁减压阀11、第二先导型比例电磁减压阀12、第三先导型比例电磁减压阀10和第四先导型比例电磁减压阀9、压力传感器I14、压力传感器Ⅱ17分别与电子控制单元13连接;电机驱动器4与电机23连接。
本发明的速比控制采用液压缸位置闭环控制:当无极变速器工作时,根据车辆当前行驶工况设定无级变速器的目标速比,同时设定第一先导型比例电磁减压阀和第二先导型比例电磁减压阀外控口的调定值,电子控制单元13结合车辆的行驶工况通过电机驱动器4控制直流电机23的转速,来调整泵3的输出压力,通过速度传感器19和速度传感器20分别检测出无极变速器主动轮可动锥轮A1和从动轮可动锥轮A2的转速,并传输至电子控制单元13中,电子控制单元13通过无极变速器主动轮可动锥轮A1和从动轮可动锥轮A2的转速计算出实际速比,并将实际速比与目标速比进行比较,根据实际速比与目标速比的偏差,得出需要控制的量,根据两者的偏差给出所需要控制的量。然后,电子控制单元13通过控制第一先导型比例电磁减压阀11和第二先导型比例电磁减压阀12的占空比,来改变第一先导型比例电磁减压阀11和第二先导型比例电磁减压阀12的阀芯开口大小,调节输入无级变速器主动轮的液压缸B1的工作油输入量,使得主动带轮移动锥轮A1在液压缸B1液压力作用和金属带作用力下沿着轴向方向移动,改变主动轮移动锥轮A1和从动轮移动锥轮A2的工作半径,从而引起实际速比的变化,同时第一先导型比例电磁减压阀11的外控口D1和第二先导型比例电磁减压阀12的外控口D2的油压力微调第一先导型比例电磁减压阀11和第二先导型比例电磁减压阀12的阀芯开口,从而调节主动轮的液压缸B1压力,改变主动带轮移动锥轮A1的轴向移动距离,从而使得实际速比更精确地向目标速比靠近,最终能平稳地在目标速比附近变化,也就实现了对无级变速器主从动轮目标速比的跟踪。
本发明的夹紧力控制采用压力闭环控制:当无极变速器工作时,电子控制单元13根据车辆当前行驶工况设定无级变速器的目标夹紧力,同时设定第三先导型比例电磁减压阀10的外控口D3和第四先导型比例电磁减压阀9的外控口D4的调定值,电子控制单元13结合车辆的行驶工况通过电机驱动器4控制直流电机23的转速,来调整泵3的输出压力,同时,主动轮的液压缸B1和从动轮的液压缸B2的压力通过压力传感器I14压力传感器Ⅱ17传送至电子控制单元13,电子控制单元13根据车辆的行驶状态确定当前的目标夹紧力,换算为从动轮的液压缸B2的目标压力后,将实际压力与目标压力相比较,根据实际压力与目标压力的偏差,得出需要控制的量。然后,电子控制单元13通过控制第三先导型比例电磁减压阀10和第四先导型比例电磁减压阀9的占空比,来改变第三先导型比例电磁减压阀10和第四先导型比例电磁减压阀9的阀芯开口大小,调节输入无级变速器从动轮的液压缸B2的油压力,同时第三先导型比例电磁减压阀10外控口D3和第四先导型比例电磁减压阀9外控口D4的油压力微调第三先导型比例电磁减压阀10和第四先导型比例电磁减压阀9的阀芯开口,从而调节输入无级变速器从动轮的液压缸B2的油压力,从而实现基于速比控制回路的变化情况来实时微调实际夹紧力,最终能平稳地在目标夹紧力附近变化,也就实现了对无级变速器金属片与带轮间目标夹紧力的跟踪。
- 夹紧力控制与速比控制耦合的无级变速器滑移控制装置
- 夹紧力控制与速比控制耦合的无级变速器滑移控制装置