一种基于新能源水翼船的环境大数据的定点采集方法及装置
文献发布时间:2023-06-19 09:35:27
技术领域
本发明属于大数据采集与分析领域,涉及环境数据采集,尤其涉及一种基于新能源水翼船的环境大数据的定点采集方法及装置。
背景技术
水翼船是一种基于流体力学设计的特殊船只,在运行过程中,水翼船利用水翼在水中高速运行产生的升力,将船体脱离水面,实现高速运行。该运行模式能够有效降低水阻,减少能源消耗。新能源水翼船的特点是利用低成本的清洁能源(例如电能)为水翼船提供动力,其特点是节能环保,并能够有效降低运行维护成本。而环境数据采集是目前环境保护和分析领域最基础的工作之一。基于海量环境数据,结合大数据技术,能够对环境数据进行有效分析,对环境变化趋势进行感知,达到环境监测的目的。
在环境数据采集领域,常见的采集方法为固定站采集、无人机采集、人工采集。其中,
人工采集成本较高,且对于水域数据采集或空气数据采集来讲,人员可能难以到达。
固定站采集适用于长时间检测,但建设固定站成本较高,如果对一片区域进行监测,固定站数量直接影响建设和维护成本。
无人机采集是近年来较新的一种环境数据监测和采集方法,利用无人机遥控和定点巡航的特性,可以搭载取样设备进行随机取样或定点取样。但无人机通常电池不耐用,飞行时间短,载重量小,这就使得其应用有极大的时间和范围限制。
发明内容
针对现有技术的不足,本发明提供了一种基于新能源水翼船的环境大数据的定点采集方法及装置,利用搭载在水翼船上的GPS导航芯片、北斗导航芯片以及5G通信模块,对水翼船运行轨迹、速度等进行控制,并远程控制水翼船数据采集设备进行数据采集和取样,实现高效率、低成本、节能环保、低延时高可靠性的数据采集和回传。本发明申请包括以下步骤:
S100:在所述水翼船中配置多个传感器、导航模块、处理中心及5G通信模块,用以构建所述水翼船的采集终端,包括以下步骤:
S101:采用Linux构建网关并配置5G通信模块,用以构建数据处理终端;
S102:配置具有微控制器的数据采集模块,并采用串口及RS-485协议与所述多个传感器共同构建数据采集终端;
S103:采用所述微控制器、电磁阀及真空瓶共同构建采样模块;
S104:采用所述微控制器、水翼船控制器、包含北斗导航芯片及GPS导航芯片的双星定位系统共同构建基于物联网控制的水翼船控制模块,其中,所述水翼船控制器包括转向控制及动力控制;
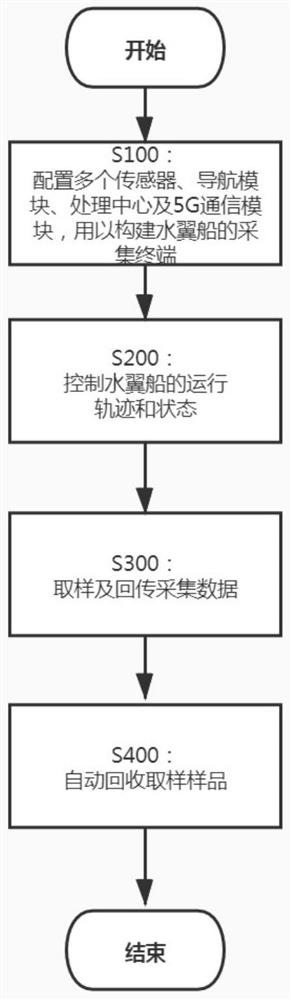
S200:控制所述水翼船的运行轨迹和状态;
S300:取样及回传采集数据;
S400:自动回收取样样品。
优选地,所述步骤S200包括以下步骤:
S201:远程初始化:设置所述水翼船的运行坐标轨迹,设置多个采集点坐标并设置坐标点行为,其包括数据采集行为及取样行为;
S202:根据初始化数据生成运行脚本,所述脚本包括各个坐标点的舵机方向数据、各个坐标点的停止及各个坐标点的重新启动数据、数据采集序号、取样真空瓶序号、结束点坐标及结束点坐标行为,所述结束点坐标行为包括自动释放取样瓶;
S203:定义所述水翼船的运行状态标识,其包括启动、运行中、停止、采样中、故障及低电量;
S204:所述水翼船启动后,从脚本获取第一坐标点数据,所述坐标点数据包括GPS坐标、方向数据及行为数据,所述行为数据包括采样、读取、放置;
根据所述方向数据进行所述水翼船的舵机方向调整,控制所述水翼船向下一坐标点行驶,并同步预加载下一坐标点数据;
S205:根据当前坐标点数据判断当前坐标点是否为采样点,如果是,执行步骤S206,否则,执行步骤S205;
S206:减速所述水翼船以平稳到达采样点,读取当前采样点的采集行为数据和取样数据,所述采集行为数据包括所启动传感器的数量及类别,所述取样数据包括取样类别,其包括水质取样及空气取样;
S207:完成所有脚本运行后,所述水翼船返回结束位置,等待下次任务。
优选地,所述步骤S300包括以下步骤:
S301:判断所接收到的数据是否为采集行为数据,如果是,执行步骤S302,否则为取样数据,执行步骤S303;
S302:读取所述采集行为数据中的传感器类别、采集数据精度、采集数据类型,并通过所述微控制器发送指令至传感器,获取所采集的数据后,建立5G通信链路,与服务器形成通信信道,并回传所采集的数据和当前坐标点的位置编号,执行步骤S304;
S303:对于取样行为中的水质采样:选取安装在船底部的真空瓶,真空瓶配置在伸缩杆上,采用伸缩杆的伸缩将真空瓶浸入/取出水面,微控制器控制板开启电磁阀3秒后关闭,并将伸缩杆收回,利用rfid读写模块向真空瓶标签写入当前采样的地理位置信息;
对于取样行为中的空气采样:选取船体上所配置的真空瓶,利用微控制器控制板开启电磁阀3秒后关闭,利用rfid读写模块向真空瓶标签写入当前采集的地理位置信息;
S304:采样结束后执行下一脚本的操作。
优选地,所述步骤S400包括以下步骤:
S401:完成取样样品后,控制模块操控所述水翼船根据设定的脚本运行回结束点;
S402:如果本次脚本有取样任务,则利用微控制器模块控制真空瓶锁,将含有样品的真空瓶释放到水面,真空瓶头部装有泡沫塞,用以将真空瓶漂浮在水域内,同时下发指令通知工作人员人工进行收集;
S403:如果取样所用真空瓶数量不足,则通知工作人员补充并重新初始化采样脚本。
一种基于新能源水翼船的环境大数据的定点采集装置,其特征在于,包括:数据采集及取样模块、定点运行轨迹和状态自动控制模块、采集数据回传和取样模块及采集样品自动回收模块,其中,
数据采集及取样模块:配置于采集舱内,包括采集模块和取样模块,其中,
采集模块包括传感器,用以采集数据;
取样模块包括电磁阀和真空瓶,用以采集样本;
定点运行轨迹和状态自动控制模块:采用GPS导航芯片和北斗导航芯片指引水翼船的定点运行,并通过自动控制模块对运行状态和设备工作状态进行控制,完成周期性的定点采集;
采集数据回传和取样模块:采用5G通信模块,并根据协议将数据打包回传,用以实时回传数据和监测;
采集样品自动回收模块:采用基于GPS导航和北斗导航的自动控制技术,在样品采集满后自动回站释放。
本发明的有益效果是:
1.清洁、高效、低成本地采集环境数据;
2.利用导航设备和运行自动控制模块对指定区域内多点数据进行采集并实现周期性工作;
3.利用5G通信构建自有数据回传协议,实现实时性的数据回传;
4.利用自动控制技术和导航技术实现样品自动返回。
附图说明
图1为本发明所提供的方法的总流程图;
图2为本发明实施例的装置的示意性框图。
具体实施方式
图1示出了本发明所提供的方法的总流程图。如图1所示,包括以下步骤:
S100:在水翼船中配置多个传感器、导航模块、处理中心及5G通信模块,用以构建水翼船的采集终端,包括以下步骤:
S101:采用Linux构建网关并配置5G通信模块,用以构建数据处理终端;
S102:配置具有stm32互连型系列微控制器的数据采集模块,并采用串口及RS-485协议与多个传感器共同构建数据采集终端;
S103:采用微控制器、电磁阀及真空瓶共同构建采样模块;
S104:采用stm32互连型系列微控制器、水翼船控制器、包含北斗导航芯片及GPS导航芯片的双星定位系统共同构建基于物联网控制的水翼船控制模块,其中,水翼船控制器包括转向控制及动力控制;
S200:控制水翼船的运行轨迹和状态,步骤S200包括以下步骤:
S201:远程初始化:设置水翼船的运行坐标轨迹,设置多个采集点坐标并设置坐标点行为,其包括数据采集行为及取样行为;
S202:根据初始化数据生成运行脚本,脚本包括各个坐标点的舵机方向数据、各个坐标点的停止及各个坐标点的重新启动数据、数据采集序号、取样真空瓶序号、结束点坐标及结束点坐标行为,结束点坐标行为包括自动释放取样瓶;
S203:定义水翼船的运行状态标识,其包括启动、运行中、停止、采样中、故障及低电量;
S204:水翼船启动后,从脚本获取第一坐标点数据,坐标点数据包括GPS坐标、方向数据及行为数据,行为数据包括采样、读取、放置;
根据方向数据进行水翼船的舵机方向调整,控制水翼船向下一坐标点行驶,并同步预加载下一坐标点数据;
S205:根据当前坐标点数据判断当前坐标点是否为采样点,如果是,执行步骤S206,否则,执行步骤S205;
S206:减速水翼船以平稳到达采样点,读取当前采样点的采集行为数据和取样数据,采集行为数据包括所启动传感器的数量及类别,取样数据包括取样类别,其包括水质取样及空气取样;
S207:完成所有脚本运行后,水翼船返回结束位置,等待下次任务。
S300:取样及回传采集数据,步骤S300包括以下步骤:
S301:判断所接收到的数据是否为采集行为数据,如果是,执行步骤S302,否则为取样数据,执行步骤S303;
S302:读取采集行为数据中的传感器类别、采集数据精度、采集数据类型,并通过stm32互连型系列微控制器发送指令至传感器,获取所采集的数据后,建立5G通信链路,与服务器形成通信信道,并回传所采集的数据和当前坐标点的位置编号,执行步骤S304;
S303:对于取样行为中的水质采样:选取安装在船底部的真空瓶,真空瓶配置在伸缩杆上,采用伸缩杆的伸缩将真空瓶浸入/取出水面,stm32互连型系列微控制器控制板开启电磁阀3秒后关闭,并将伸缩杆收回,利用rfid读写模块向真空瓶标签写入当前采样的地理位置信息;
对于取样行为中的空气采样:选取船体上所配置的真空瓶,利用stm32互连型系列微控制器控制板开启电磁阀3秒后关闭,利用rfid读写模块向真空瓶标签写入当前采集的地理位置信息;
S304:采样结束后执行下一脚本的操作。
S400:自动回收取样样品,步骤S400包括以下步骤:
S401:完成取样样品后,控制模块操控水翼船根据设定的脚本运行回结束点;
S402:如果本次脚本有取样任务,则利用stm32互连型系列微控制器模块控制真空瓶锁,将含有样品的真空瓶释放到水面,真空瓶头部装有泡沫塞,用以将真空瓶漂浮在水域内,同时下发指令通知工作人员人工进行收集;
S403:如果取样所用真空瓶数量不足,则通知工作人员补充并重新初始化采样脚本。
本发明还提供了一种基于新能源水翼船的环境大数据的定点采集装置。
图2示出了本发明实施例的装置100的示意性框图,如图2所示,该装置100包括:数据采集及取样模块101、定点运行轨迹和状态自动控制模块102、采集数据回传和取样模块103及采集样品自动回收模块104,其中,
数据采集及取样模块101:配置于采集舱内,包括采集模块和取样模块,其中,
采集模块包括传感器,用以采集数据;
取样模块包括电磁阀和真空瓶,用以采集样本;
定点运行轨迹和状态自动控制模块102:采用GPS导航芯片和北斗导航芯片指引水翼船的定点运行,并通过自动控制模块对运行状态和设备工作状态进行控制,完成周期性的定点采集;
采集数据回传和取样模块103:采用5G通信模块,并根据协议将数据打包回传,用以实时回传数据和监测;
采集样品自动回收模块104:采用基于GPS导航和北斗导航的自动控制技术,在样品采集满后自动回站释放。
应当理解的是,本发明不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
- 一种基于新能源水翼船的环境大数据的定点采集方法及装置
- 一种大数据云平台下多环境配置的数据采集方法