一种机械手的自动定位机构
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及保温杯加工技术领域,尤其是涉及一种机械手的自动定位机构。
背景技术
目前,现有的不锈钢保温杯加工,往往需要对外壳、内壳分别进行多工序的加工,而后进行焊接装配。往往涉及到以下工序:割头、水胀、分段、缩口、割口、平口、滚螺纹、焊接、抛光等。现有技术都是采用单独的设备对不同的工序进行单独加工,人工成本高、产地占用广、且各工序之间还需要进行加工件的搬运和上料,费时费力,加工成本高,效率低下。为此提出能够适用于环形流水生产线的机械手的自动定位机构。
发明内容
针对现有技术的不足,本发明提供一种机械手的自动定位机构,结构简单,能够实现环形自动化生产中心上的机械手自动定位,使加工的效率和精度得以保证。
本发明解决其技术问题所采用的技术方案是:一种机械手的自动定位机构,包括:机架;转动台,可在所述机架上纵向升降及水平转动;若干机械手模块,环形设置在所述转动台上并向外延伸;若干夹紧模块,设置在所述机械手模块上;所述转动台上设置有若干感应模块,所述机架上设置有传感器模块,所述传感器模块用于与其中一处的所述感应模块配合,来完成所述机械手模块的单向转动后的定位。
上述技术方案中,优选的,所述感应模块选用为L型的感应片,所述传感器模块选用为U型光电传感器,当所述转动台进行转动后,所述感应片将置于所述U型光电传感器之间,使其得到信号,控制所述转动台停止转动。
上述技术方案中,优选的,还包括:上料位、下料位,及若干加工位,环形排列在所述生产线的周围;若干用于提供不同工序的加工设备,可选择性地设置在不同的加工位处;所述机械手模块用于将工件从所述上料位取走并跟随所述转动台间歇性转动,将所述工件依次进入所述不同的加工位进行加工,并最终进入至所述下料位。
上述技术方案中,优选的,所述转动台通过设置在所述机架上的顶升驱动机构来控制纵向升降。
上述技术方案中,优选的,所述转动台通过设置在所述机架上的旋转驱动机构来控制水平转动。
上述技术方案中,优选的,所述机械手模块包括支撑臂、机械手驱动气缸、连接臂,所述支撑臂安装在所述转动台上,所述连接臂通过所述机械手驱动气缸在所述支撑臂上,通过所述机械手驱动气缸来实现所述连接臂在所述支撑臂上的延伸长度;所述支撑臂上连接有夹紧连接臂,所述夹紧连接臂的两端设置有所述夹紧模块。
本发明的有益效果是:1.本发明提供的技术方案,操作简单,实现了多工序的自动化加工,大大降低了人工成本,提升了生产效率;2.适用于多种工序的环形自动化生产中心,设备和工序可任意搭配(柔性);3.该设备可以通过更换模具来实现不同工序的操作,一机实现多用;4.本发明的机械手的自动定位机构,结构简单,能够实现环形自动化生产中心上的机械手自动定位,使加工的效率和精度得以保证。
附图说明
下面结合附图和实施例对本发明进一步说明。
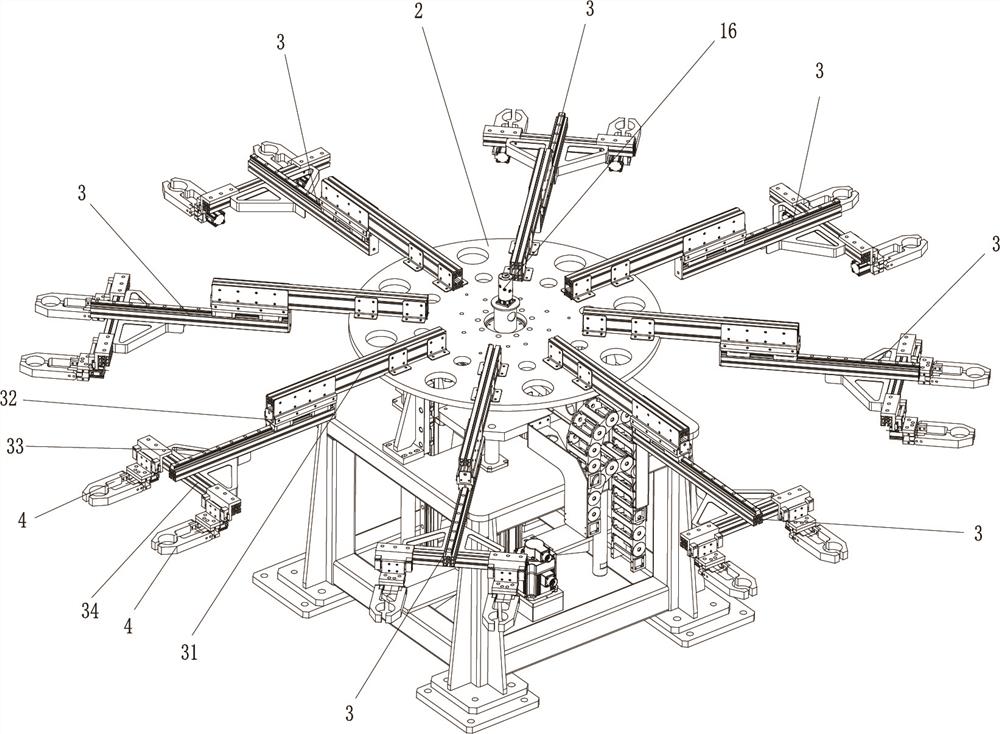
图1是本发明的结构示意图。
图2是本发明的图1中A处放大示意图。
图3是本发明的另一角度结构示意图。
图4是本发明的另一角度结构示意图。
图5是本发明的生产线与加工设备的布置图。
图中,1.机架,2.转动台,3.机械手模块,31.支撑臂,32.机械手驱动气缸,33.连接臂,4.夹紧模块,5.上料位,6.下料位,7.加工位,8.加工设备,9.传感器模块,10.感应模块,11.顶升驱动机构,12.旋转驱动机构,13.支撑台面,14.滑轨,15.转动连接盘,16.主轴。
具体实施方式
参照图1-5所示,为本发明的具体实施方式:一种机械手的自动定位机构及使用该机械手的柔性加工生产线,包括机架,在机架上安装有支撑台面,支撑台面通过多根滑轨与机架连接,支撑台面上固定安装有转动连接盘,转动连接盘上纵向设置有可转动的主轴,在转动连接盘上的上方安装有绕主轴转动的转动台,在转动连接盘的下方安装有旋转驱动机构,所述旋转驱动机构选用为旋转伺服电机,所述旋转伺服电机来带动所述主轴转动;所述支撑台面的设置有用于驱动支撑台面、转动连接盘及转动台的顶升驱动机构,所述顶升驱动机构选用为伺服电机配三个磁环;通过以上设置,实现了转动台的纵向可活动的控制,及水平可转动的控制。
在所述转动台上环形均布有8组机械手模块,在单个机械手模块上安装有用于夹取工件的夹紧模块,所述夹紧模块选用为单独气路控制的气爪,所述机械手模块的具体结构为包括支撑臂、机械手驱动气缸、连接臂,所述支撑臂安装在所述转动台上,所述连接臂通过所述机械手驱动气缸在所述支撑臂上,通过所述机械手驱动气缸来实现所述连接臂在所述支撑臂上的延伸长度;所述支撑臂上连接有夹紧连接臂,所述夹紧连接臂的两端设置有所述夹紧模块。
在转动台的周围设置有8个与相应的机械手模块对应的工位,其中的两位为上料位和下料位,其余的工位为加工位,在相应的加工位上可以放置有用于提供不同工序的加工设备。为了适用于不同工艺流程的需求,相应的工位上可以增设或减设相应的加工设备,同时其不同的加工设备之间的位置可以调整,或者通过调整单台加工设备上的模具,以此使其适用性更广。
为了便于机械手模块的定位,所述转动台下方设置有8处与相应的机械手模块对于的感应模块,在支撑台面上设置有传感器模块,所述感应模块选用为L型的感应片,所述传感器模块选用为U型光电传感器,当转动台进行转动后,所述传感器模块用于与其中一处的所述感应模块配合,来完成所述机械手模块的单次转动后的定位。
该保温杯的柔性加工生产线的使用方法,步骤如下:
S1,根据所需要的加工工艺,选择相应的加工设备放置于相应的加工位处;
S2,通过顶升驱动机构将转动台移动至所需要的高度;通过旋转驱动机构将转动台转动至所需要的位置;
S3,通过顶升驱动机构将转动台下降至所需要的高度,随后通过夹紧模块夹取上料位上的工件,并将转动台上升至一定高度;
S4,通过旋转驱动机构将转动台转动一定位置,使工件转动至下一加工位;
S5,将转动台下降至所需要的高度,将工件置于加工位上进行加工完毕后,通过该夹紧模块重新夹取该工件,并通过另一夹紧模块夹取上料位上的另一工件;
S6,重复S5的步骤,直至所有的机械手模块上均夹取有相应的工件,形成转动式的循环流水线。
以上所述,只是本发明的一个实施例,并非对本发明作出任何形式上的限制,在不脱离本发明的技术方案基础上,所作出的简单修改、等同变化或修饰,均落入本发明的保护范围。
- 一种机械手的自动定位机构
- 一种自动纠偏的机械手机构及使用该机械手机构的拆垛机