一种电梯井道壁测距装置
文献发布时间:2023-06-19 11:29:13
技术领域
本发明涉及电梯检验检测技术领域,尤其涉及一种电梯井道壁测距装置。
背景技术
目前我国电梯保有量逐年攀升,针对电梯的检验检测工作随着电梯技术的更新不断进步。由于电梯轿厢距井道壁距离过宽将存在电梯检修、搭乘人员从该缝隙坠落风险,因此我国针对电梯检验的规范《电梯监督检验和定期检验规则—曳引与强制驱动电梯》中规定电梯轿厢与面对轿厢入口的井道壁的间距不大于0.15m,对于局部高度小于0.50m该间距可以增加到0.20m。目前针对井道壁间距的一般性测量方法是检验人员位于轿厢内部通过重复开关轿门测量多个位置的轿厢与井道壁的间距,该方法需至少两人配合,操作复杂且容易导致漏检,检测效率低下。现有测量工具体积庞大且安装方式复杂,没有成熟的人机交互界面,测量后需要从仪器本身读取测量结果,操作繁复,针对一般性测量方法优势不明显。
另外,专利CN201821380763.3中记载了一种便携式无线通讯井道壁测距装置,该装置通过手动输入的电梯运行速度来计算轿厢位移,众所周知电梯运行速度不是匀速的,故通过该速度来计算,得到的井道壁距离超标的具体楼层并不精确,且也无法计算距离超标的纵向延伸长度。
发明内容
针对上述问题中存在的不足之处,本发明提供一种电梯井道壁测距装置。
为实现上述目的,本发明提供一种电梯井道壁测距装置,包括:
距离测量模块,用于测量井道壁与电梯轿厢之间的距离;
位移检测模块,用于测量所述电梯轿厢的位移;
处理模块,用于分别接收并处理所述距离测量模块的数据和所述位移检测模块的数据;
显示模块,用于接收所述处理模块上传的数据,并以图表的形式呈现;
其中,检修时,所述电梯轿厢以同一个方向运行,所述距离测量模块的数据和所述位移检测模块的数据以图表的形式呈现在所述显示模块上,根据所述图表的信息,通过公式计算得到所述井道壁与所述电梯轿厢之间的距离超过预设值的位置:
式中:f为起始楼层;F为停止楼层;±为运行方向;S为所述电梯轿厢运行位移;h为楼层高度。
优选的是,所述距离测量模块包括与激光传感器所述激光传感器与所述电梯轿厢的外表面处于同一水平面上。
优选的是,所述激光传感器通过夹具装置固定于所述电梯轿厢的顶端。
优选的是,所述处理模块包括处理器、告警装置和通讯模块;
所述告警装置包括显示屏和蜂鸣器,所述显示屏和蜂鸣器均与所述处理器相连;当所述井道壁与所述电梯轿厢之间距离超过预设值时,所述蜂鸣器蜂鸣告警及所述显示屏显示告警信息;
所述位移检测模块、所述显示模块和所述处理器通过所述通讯模块相互连接,从而实现三者间的数据交互。
优选的是,还包括电源模块,所述电源模块用于给所述电梯井道壁测距装置供电。
优选的是,所述位移检测模块包括用于检测所述电梯轿厢位移的旋转编码器,所述旋转编码器固定设于连杆的一端,所述连杆的另一端设有磁底座,所述磁底座通过磁力固定在所述电梯轿厢上。
优选的是,所述旋转编码器检测限速器钢丝绳,则所述电梯轿厢的位移S为:
式中,n为所述电梯轿厢运行过程中的总编码数;C为所述旋转编码器的滚轮外周长;N为所述旋转编码器圆周总编码数。
优选的是,所述旋转编码器检测曳引比为2:1的电梯曳引钢丝绳,则所述电梯轿厢的位移S为:
式中,n为所述电梯轿厢运行过程中的总编码数;C为所述旋转编码器的滚轮外周长;N为所述旋转编码器圆周总编码数。
优选的是,所述位移检测模块包括用于测量所述电梯轿厢运行过程中加速度值的加速度传感器,以静止状况下加速度传感器的数值作为零点,采集每一个检测间隔下的加速度值,通过公式得到所述电梯轿厢的位移S为:
式中,V
优选的是,还包括校准模块,所述校准模块包括用于校正所述井道壁与所述电梯轿厢之间距离的两个按键,所述按键与所述处理器模块相连。
与现有技术相比,本发明的有益效果为:
本发明安装简便、操作简单,采用传感器自动测量井道壁与轿厢的间距,采用位移检测模块自动测量轿厢的位移,并将数据发送至显示模块实时显示,通过公式计算能精确的得到距离超标的具体位置以及距离超标的纵向延伸长度;实现了井道壁距离的便携式实时测量,提高了电梯检验的效率,保证了检验员的安全。
附图说明
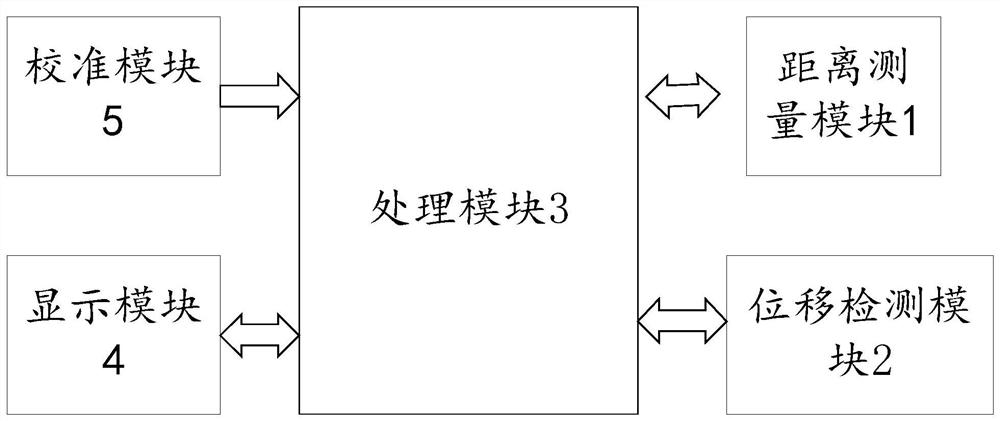
图1为本发明中的一种实施例公开的便携式无线通讯井道壁测距装置的硬件结构框架图;
图2为本发明中距离测量模块和位移检测模块的结构示意图;
图3为本发明中电梯轿厢的结构示意图。
附图标记:
1、距离测量模块;2、位移检测模块;3、处理模块;4、显示模块;5、校准模块;6、U型夹块;7、丝杠顶杆;11、激光传感器;21、加速度传感器;22、旋转编码器;23、连杆;24、磁底座;31、电源模块;32、显示屏;33、通讯模块;34、蜂鸣器;35、串口;36、线缆。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
下面结合附图1-3对本发明做进一步的详细描述:
参照图1,本发明提供一种电梯井道壁测距装置,包括:
距离测量模块1,用于测量井道壁与电梯轿厢之间的距离;
位移检测模块2,用于测量电梯轿厢的位移;
处理模块3,用于分别接收并处理距离测量模块1的数据和位移检测模块2的数据;
显示模块4,用于接收处理模块3上传的数据,并以图表的形式呈现;
其中,检修时,电梯轿厢以同一个方向运行,距离测量模块1的数据和位移检测模块2的数据以图表的形式呈现在显示模块4上,根据图表的信息,通过公式计算得到井道壁与电梯轿厢之间的距离超过预设值的位置:
式中:f为起始楼层;F为停止楼层;±为运行方向;S为电梯轿厢运行位移;h为楼层高度。
进一步地,处理模块3包括处理器、告警装置和通讯模块33;
告警装置包括显示屏32和蜂鸣器34,显示屏32和蜂鸣器34均与处理器相连;当井道壁与电梯轿厢之间距离超过预设值时,蜂鸣器34蜂鸣告警及显示屏32显示告警信息;
位移检测模块2、显示模块4和处理器通过通讯模块33相互连接,从而实现三者间的数据交互。
在本实施例中还包括电源模块31,电源模块31用于给该装置供电。
在本实施例中显示模块4为手机、平板、电脑等移动终端,通讯模块33为蓝牙通讯模块。
参照图2和3,距离测量模块1包括4个激光传感器11,激光传感器11与电梯轿厢的外表面处于同一水平面上。
具体地,距离测量模块1和处理模块3均设置在两个载体内,且两个载体的串口35之间通过线缆36连通,且每个载体的两端均设有激光传感器11。两个载体通过夹具装置固定于电梯轿顶护脚板。
其中,夹具装置包括U型夹块6,且该U型夹块6的一端设有丝杠顶杆7,且丝杠顶杆7的一端设有与手轮,转动手轮,使得丝杠顶杆7向U型夹块6的另一端移动。即将该U型夹块6卡在轿顶护脚板上,且转动手轮,使得丝杠顶杆7与轿顶护脚板固定,即U型夹块6固定在电梯轿厢的顶端。
在本实施例中,位移检测模块2包括用于检测电梯轿厢位移的旋转编码器22,旋转编码器22固定设于连杆23的一端,连杆23的另一端设有磁底座24,磁底座24通过磁力固定在电梯轿厢上。
当旋转编码器22检测限速器钢丝绳,则电梯轿厢的位移S为:
式中,n为电梯轿厢运行过程中的总编码数;C为旋转编码器22的滚轮外周长;N为旋转编码器22圆周总编码数。
当旋转编码器22检测曳引比为2:1的电梯曳引钢丝绳,则电梯轿厢的位移S为:
式中,n为电梯轿厢运行过程中的总编码数;C为旋转编码器22的滚轮外周长;N为旋转编码器22圆周总编码数。
在本实施例中,位移检测模块2包括用于测量电梯轿厢运行过程中加速度值的加速度传感器21,以静止状况下加速度传感器21的数值作为零点,采集每一个检测间隔下的加速度值,通过公式得到电梯轿厢的位移S为:
式中,V
在本发明中可以单独提取加速度传感器21或旋转编码器22任一个传感器的数值来计算轿厢位移,也可以同时选择两个,即选择两个的平均值作为位移数据。
进一步地,还包括校准模块5,校准模块5包括用于校正井道壁与电梯轿厢之间距离的两个按键,按键与处理器模块相连,通过按键校正当前井道壁与电梯轿厢间距离。
在本实施例中,激光传感器11、旋转编码器22、加速度传感器21均为现有常规的器件,故在此对其原理不做详细阐述。
本发明的使用方法为:
若采用位移传感器模式,需将旋转编码器22安装于限速器钢丝绳或曳引钢丝绳处;若采用加速度传感器21模式,检测加速度传感器21需要水平安装。
在显示模块4上对软件进行配置,通过蓝牙通讯连接处理模块3、旋转编码器22与显示模块4;
在显示模块4上选择位移传感器模式或加速度传感器21模式,并校准基准距离、设置旋转编码器22检测位置、楼层高度、运行方向和起始楼层;
关闭层门,检修方式操纵电梯以固定方向运行,实现井道壁距离的实时测量。
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种电梯井道壁测距装置
- 电梯轿厢与井道壁随行测距仪