一种吸嘴自动切换机构及切换方法
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及吸嘴技术领域,特别涉及一种吸嘴自动切换机构及切换方法。
背景技术
目前半导体领域的设备在吸装元器件时,由于吸装物料无法统一,每更换一种物料时,都需要停机手动更换吸嘴,导致生产效率低下,为此,我司经过长久的研发与设计,提出一种吸嘴自动切换机构及切换方法以解决上述问题。
发明内容
本发明的目的在于针对现有技术的不足,提供一种吸嘴自动切换机构及切换方法,该吸嘴自动切换机构及切换方法可以很好地解决上述问题。
为达到上述要求本发明解决其技术问题所采用的技术方案是:
提供一种吸嘴自动切换机构,包括吸嘴、吸嘴库底座和拾取所述吸嘴的拾取臂;所述吸嘴的侧壁上周向均匀分布有多个吸嘴定位块,所述吸嘴库底座上设有活动槽,所述活动槽的底部设有吸嘴容纳槽以及适配所述吸嘴定位块的定位槽;还包括盖设在所述吸嘴库底座上的吸嘴库盖板,所述吸嘴库盖板上设有分别供所述吸嘴与所述吸嘴定位块通过的活动孔和避让孔,所述避让孔与所述定位槽不正对。
本发明所述的吸嘴自动切换机构,其中,所述吸嘴定位块的横截面呈倒三角形,所述定位槽为与所述吸嘴定位块相适配的V形槽。
本发明所述的吸嘴自动切换机构,其中,所述拾取臂与所述吸嘴可拆卸连接。
本发明所述的吸嘴自动切换机构,其中,所述拾取臂包括固定所述吸嘴的固定盘和调整所述固定盘的调节臂;所述固定盘的上端设有半球状凸起,所述调节臂上设有调节盘,所述调节盘上对应所述半球状凸起设有调节槽,所述调节盘上设有连接所述固定盘的调节螺丝,所述固定盘的底部设有定位所述吸嘴的固定槽,所述固定槽的底面设有吸附所述吸嘴的磁铁。
本发明所述的吸嘴自动切换机构,其中,所述吸嘴包括适配所述固定槽的吸嘴座,和设于所述吸嘴座上背离所述固定盘的一侧的吸嘴本体;所述固定槽的底面上设有卡接槽,所述吸嘴座上设有适配所述卡接槽的凸台,所述凸台的上端边缘设有导向斜面,所述凸台的上表面设有与所述吸嘴本体内部通道连通的第一气道,所述卡接槽的底面上设有贯穿所述半球状凸起的第二气道,所述固定盘的外侧壁上分别设有连通所述第二气道与所述卡接槽的第三气道和第四气道,所述卡接槽内设有导通所述第一气道与所述第二气道的密封管件。
本发明所述的吸嘴自动切换机构,其中,所述吸嘴定位块设有四个,四个所述吸嘴定位块周向均匀设置在所述吸嘴座的侧壁上。
本发明所述的吸嘴自动切换机构,其中,所述吸嘴定位块位于所述吸嘴座的下端,所述吸嘴座的侧壁的上端设有吸嘴定位销,所述固定槽的侧壁上设有避让所述吸嘴定位销的避让槽。
本发明所述的吸嘴自动切换机构,其中,所述通道、所述第一气道、所述密封管件和所述第二气道均同轴,所述调节盘上设有穿孔,所述穿孔与所述第二气道同轴。
本发明所述的吸嘴自动切换机构,其中,所述活动槽、所述吸嘴容纳槽和所述定位槽组成一个单元,所述单元设有多个,多个所述单元呈直线排列在所述吸嘴库底座上。
还提供一种吸嘴自动切换机构的吸嘴切换方法,实现切换的步骤如下:
第一步骤:机械手带动拾取臂移动到吸嘴库底座上方第一指定高度,校准吸嘴与活动孔的位置,校准吸嘴定位块与避让孔的位置并到位;
第二步骤:机械手带动拾取臂下降到第二指定高度使吸嘴定位块进入活动槽,校准吸嘴定位块与定位槽的位置并到位,吸嘴与拾取臂分离,吸嘴存入容纳槽以入库,拾取臂上升复位到第一指定高度;
第三步骤:机械手带动拾取臂移动到预切换吸嘴上方第一指定高度,拾取臂下降到第三指定高度,拾取臂拾取预切换吸嘴并上升到第二指定高度使吸嘴定位块移出定位槽,校准吸嘴定位块与避让孔的位置并到位,机械手再次上升带动吸嘴到第一指定高度并复位以出库。
本发明的有益效果在于:本发明公开一种吸嘴自动切换机构及切换方法,吸嘴的放置过程:设备机械手带动拾取臂至吸嘴库底座所在位置,首先运动至吸嘴需要放置的指定位置即活动孔的正上方,利用设备机械手将吸嘴旋转一定角度后使吸嘴定位块对齐避让孔,机械手带动吸嘴运动至指定高度进入活动槽,再次利用设备机械手将吸嘴回转到原始角度,吸嘴与拾取臂分离,然后机械手向上运动,吸嘴便放置在吸嘴库内,完成吸嘴的放置流程。
吸嘴的切换过程:设备机械手带动吸嘴至吸嘴库底座所在位置,首先运动至所要更换的吸嘴放置的位置即活动孔的正上方,机械手带动吸嘴向下运动至指定位置,拾取臂拾取吸嘴,然后利用设备机械手将吸嘴旋转一定角度使吸嘴定位块与避让孔对齐并进一步上升,机械手带动吸嘴运动至指定高度,再次利用设备机械手将吸嘴结构回转至原始角度,完成吸嘴的切换流程。
通过机械手带动拾取臂移动进而实现吸嘴的快速切换,不光大大提升了生产效率,同时还通过吸嘴定位块保证了吸嘴入库的精准度,避免了吸嘴位置不精确导致拾取芯片时候所存在的误差。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图及实施例对本发明作进一步说明,下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
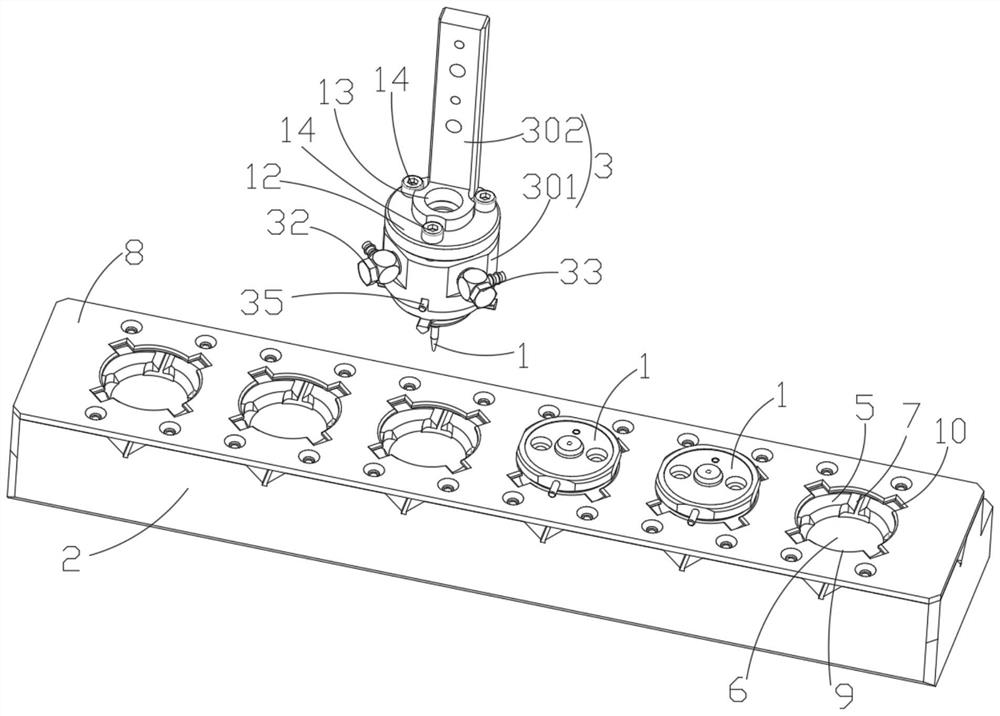
图1是本发明吸嘴自动切换机构的整体结构示意图。
图2是本发明吸嘴自动切换机构的吸嘴库底座的结构图。
图3是本发明吸嘴自动切换机构及的吸嘴结构爆炸图。
图4是本发明吸嘴自动切换机构的夹持臂的结构图。
图5是本发明吸嘴自动切换机构的固定盘的结构图。
图6是本发明吸嘴自动切换机构的吸嘴与拾取臂安装到位的俯视图。
图7是图6的D-D剖视图。
图8是本发明吸嘴自动切换机构的吸嘴切换方法流程图。
具体实施方式
为了使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的部分实施例,而不是全部实施例。基于本发明的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
本发明较佳实施例的吸嘴自动切换机构,如图1-8所示,包括吸嘴1、吸嘴库底座2和拾取吸嘴1的拾取臂3;吸嘴1的侧壁上周向均匀分布有多个吸嘴定位块4,吸嘴库底座2上设有活动槽5,活动槽5可供吸嘴定位块4旋转活动,活动槽5的底部设有吸嘴容纳槽6以及适配吸嘴定位块4的定位槽7;本机构还包括盖设在吸嘴库底座2上的吸嘴库盖板8,吸嘴库盖板8上设有分别供吸嘴1与吸嘴定位块4通过的活动孔9和避让孔10,避让孔10与定位槽7不正对以于吸嘴1上方限位吸嘴1,具体的,每一吸嘴定位块4位于与其相邻的两避让孔10的正中间的下方;吸嘴的放置过程:设备机械手带动拾取臂3至吸嘴库底座2所在位置,首先运动至吸嘴1需要放置的指定位置即活动孔9的正上方,利用设备机械手将吸嘴1旋转一定角度后使吸嘴定位块4对齐避让孔10,机械手带动吸嘴1运动至指定高度进入活动槽5,再次利用设备机械手将吸嘴1回转到原始角度,吸嘴1与拾取臂3分离,然后机械手向上运动,吸嘴1便放置在吸嘴1库内,完成吸嘴1的放置流程。
吸嘴的切换过程:设备机械手带动吸嘴1至吸嘴库底座2所在位置,首先运动至所要更换的吸嘴1放置的位置即活动孔9的正上方,机械手带动吸嘴1向下运动至指定位置,拾取臂3拾取吸嘴1,然后利用设备机械手将吸嘴1旋转一定角度使吸嘴定位块4与避让孔10对齐并进一步上升,机械手带动吸嘴1运动至指定高度,再次利用设备机械手将吸嘴1结构回转至原始角度,完成吸嘴1的切换流程。
通过机械手带动拾取臂3移动进而实现吸嘴1的快速切换,不光大大提升了生产效率,其结构简单,操作方便,可以根据吸装物料规格的不同,自动切换所需的吸嘴1来吸装元器件,同时也可以完成同一基底上不同元器件的贴装,同时还通过吸嘴定位块4保证了吸嘴1入库的精准度,避免了吸嘴1位置不精确导致拾取芯片时候所存在的误差。
优选的,吸嘴定位块4的横截面呈倒三角形,定位槽7为与吸嘴定位块4相适配的V形槽,吸嘴定位块4和定位槽7均采用V型结构,使得吸嘴1在吸嘴1库内不会发生偏摆,保证位置准确。
优选的,拾取臂3与吸嘴1可拆卸连接,以方便与吸嘴1固定与分离,通常可采用机械夹爪,真空吸盘等拾取结构实现。
优选的,拾取臂3包括固定吸嘴1的固定盘301和调整固定盘301的调节臂302;固定盘301的上端设有半球状凸起11,调节臂302上设有调节盘12,调节盘12上对应半球状凸起11设有调节槽13,调节盘12上设有三个连接固定盘301的调节螺丝14,该三个调节螺丝14互成120°夹角分布,增加吸嘴1的水平调整机构,可以在工作前调整吸嘴1的水平,保证设备的贴装精度,调节时,拧动调节螺丝14便可调节固定盘301对应位置倾斜以矫正成水平,固定盘301的底部设有定位吸嘴1的固定槽15,固定槽15的底面设有吸附吸嘴1的磁铁16,用以吸附吸嘴1,方便吸嘴1入库后与固定盘301的分离,结构简单,拾取效果极佳。
优选的,吸嘴1包括适配固定槽15的吸嘴座101,和设于吸嘴座101上背离固定盘301的一侧的吸嘴本体102;具体的,吸嘴座101包括夹持吸嘴本体102的夹持臂1a、将吸嘴本体102锁紧在夹持臂1a上的锁紧螺母1b和固定夹持臂1a的固定座1c;固定座1c上设有供夹持臂1a穿过的固定孔17,夹持臂1a的下端设有多个呈环形分布的夹持片18用以夹持吸嘴本体102,夹持片18的外侧设有收紧斜面19,夹持臂1a的上端设有适配锁紧螺母1b的螺纹段20,当吸嘴本体102插入多个夹持片18之间后,将锁紧螺母1b套在夹持片18上并拧紧,配合锁紧斜面19进而将吸嘴本体102夹持固定,为了方便固定,夹持臂1a的上端设有圆盘21以固定夹持臂1a,吸嘴定位块4设置在固定座1c的侧壁上,吸嘴的固定方式采用夹持式,既能保证吸嘴与吸嘴夹持臂同心,又能在更换吸嘴时更加简捷、方便;固定槽15的底面上设有卡接槽22,吸嘴座101上设有适配卡接槽22的凸台23,凸台23的上端边缘设有导向斜面24,以方便凸起卡入卡接槽22,安装快速;凸台23的上表面设有与吸嘴本体102内部通道25连通的第一气道26,卡接槽22的底面上设有贯穿半球状凸起11顶部的第二气道27,具体的,在半球状凸起11的顶部设有密封第二气道27的透明密封板28,固定盘301的外侧壁上分别设有连通第二气道27与卡接槽22的第三气道29和第四气道30,卡接槽22内设有导通第一气道26与第二气道27的密封管件31,固定盘301上分别对应第三气道29和第四气道30设有第一气嘴32和第二气嘴33,固定槽15的底面上环绕卡接槽22设有密封环34,工作时,通过第一气嘴32连通负压气源,进而配合吸嘴本体102吸取芯片;通过第二气嘴33连通负压气源进而将吸嘴座101吸附在固定槽15内,通过真空吸附和磁铁16吸附两个吸附方式,可进一步防止吸嘴1晃动,保证工作稳定性。
优选的,吸嘴定位块4设有四个,四个吸嘴定位块4周向均匀设置在吸嘴座101的侧壁上,具体的,四个吸嘴定位块4互成90°夹角分布,从四个方向保证吸嘴定位块4置于容纳槽内时发生偏斜。
优选的,吸嘴定位块4位于吸嘴座101的下端,吸嘴座101的侧壁的上端设有吸嘴定位销35,具体的,吸嘴定位销35设置在圆盘21的侧壁上,固定槽15的侧壁上设有避让吸嘴定位销35的避让槽36,设置定位销以定位吸嘴1在固定槽15内的位置,防止吸嘴1转动错位。
优选的,第一气道26、密封管件31、第二气道27和吸嘴本体102的通道25均同轴,调节盘12上设有穿孔,具体的,调节槽13贯穿调节盘12以形成前述穿孔,穿孔与第二气道27同轴,设置同轴可便于配置视觉识别系统以识别吸嘴1与芯片的相对位置,相比较传统的侧方位定位,可以大大提升芯片的定位精确度。
优选的,活动槽5、吸嘴容纳槽6和定位槽7组成一个单元,单元设有多个,多个单元呈直线排列在吸嘴库底座2上,以便于操作切换。
一种吸嘴1自动切换机构的吸嘴1切换方法,实现切换的步骤如下:
第一步骤S10:初始状态下,吸嘴的工位角为零度,机械手带动拾取臂3移动到吸嘴库底座2上方第一指定高度,该第一指定高度可根据具体实际情况设置,校准吸嘴1与活动孔9的位置,进一步校准吸嘴定位块4与避让孔10的位置并到位,具有机械手带动吸嘴水平旋转45°以对位校准;
第二步骤S20:机械手带动拾取臂3下降到第二指定高度使吸嘴定位块4进入活动槽5,该第二指定高度可根据具体实际情况设置,校准吸嘴定位块4与定位槽7的位置并到位,具有机械手带动吸嘴水平反向旋转45°以对位校准,吸嘴1与拾取臂3分离,具体的,由于吸嘴座101与固定盘301采用真空吸附和磁吸的连接方式,当吸嘴定位块4对准定位槽7后,机械手上升,进而使得吸嘴定位块4被吸嘴库盖板8挡住,机械手继续上升,使得吸嘴1与固定盘301脱离,进而实现吸嘴1存入容纳槽以入库,拾取臂3上升复位到第一指定高度,继续运动到工位上以进行加工生产;
第三步骤S30:机械手带动拾取臂3移动到预切换吸嘴1上方第一指定高度,拾取臂3下降到第三指定高度,该第三指定高度可根据具体实际情况设置,拾取臂3拾取预切换吸嘴1并上升到第二指定高度使吸嘴定位块4移出定位槽7,校准吸嘴定位块4与避让孔10的位置并到位,具有机械手带动吸嘴水平正向或反向旋转45°以对位校准,机械手再次上升带动吸嘴1到第一指定高度并复位以出库。
需要说明的是,机械手可采用多轴机械手或者X/Y/Z轴运动系统实现,此为现有技术,不再赘述。
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
- 一种吸嘴自动切换机构及切换方法
- 一种多车型自动化生产线车型切换机构及切换方法