一种用于激光SLAM的数据采集及处理方法和装置
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及无人驾驶环境感知领域,尤其涉及一种用于激光slam的数据采集及处理方法与装置。
背景技术
较为成熟的激光SLAM方案中,LOAM(Lidar Odometry and Mapping in Real-time)方案被大众所接受。LOAM是基于激光雷达而搭建的在ROS平台下的SLAM系统,特征提取(Lidar Registration)和里程计解算(Odometry and Mapping)是核心。在LOAM系列方案中,采用对点云数据提取特征的方式,对前后帧的点云数据进行配准。从而最终实现建图和定位的功能。
基于上述方法在直线时的行驶工况下,SLAM算法往往具有很好的表现,但是在一些特殊路段例如上下坡以及转弯等情况下,SLAM算法可能会出现重影等情况,从而影响到最终建图和定位的精度。对于实际的应用,无人驾驶车辆在经过这些特殊路段的时候定位不准对于安全性会造成很大的影响。
发明内容
为解决上述技术问题,本发明提供一种用于激光SLAM的数据采集及处理方法和装置,让车辆在经过这些特殊路段如上下坡以及转弯等情况下时能够记录下产生的特殊信号,并将这些信号处理之后用于建图和定位,可以极大地改善无人驾驶车辆在这些特殊路段特征不明显的情况,可以减少在建图过程中无匹配的现象,也可以有效减少在定位过程中累积误差的影响。可以有效地提高车辆在建图和定位过程中的精度。
本发明为解决上述技术问题,提供的技术方案如下:
一种用于激光SLAM的数据采集及处理方法,其特征在于包括以下两个步骤:
步骤S1、利用激光雷达、IMU、GPS三种传感器同时对建图和定位所需要的信息进行采集,其中:
激光雷达实时测量车辆周围环境的点云信息,为建图和定位提供数据来源;
IMU实时地测量车辆在行驶过程中的状态,用于减少点云信息由于车辆运动产生的运动畸变; IMU还需要采集车辆在包括上下坡、左右转弯以及路过不平路面的特殊时刻产生的特征数据;
GPS用于接收车辆在坐标系下的位置,用于减少激光雷达和IMU在建图过程中产生的累计误差;
步骤S2、对采集到的数据进行数据处理,将不同传感器接收到的数据进行时间同步与空间同步,所述时间同步与空间同步包括基于相同时间戳的传感器数据融合,以及将以传感器自身为坐标原点的坐标系统一转换到车辆坐标系中,用于表达车辆在世界坐标系中的位置;
在时间同步与空间同步过程中,针对上下坡、左右路口转弯以及路面不平这些特殊工况,需要将IMU记录的特征数据特殊处理后传递给点云信息,在所述特殊工况之外的点云信息不包括IMU记录的特征数据。
进一步地,上述技术方案中,上下坡、左右路口转弯以及路面不平这些工况,IMU记录的信息包括:在上下坡的情况下,记录IMU信息的俯仰角,在左右转弯的时候记录IMU的y轴加速度,在经过路面不平的路段时,记录IMU信息的Z轴加速度。
进一步地,上述技术方案中,所述特殊处理包括:
对于上下坡、左右路口转弯以及路面不平造成的y轴方向上产生的加速度设置阈值进行筛选;
考虑车辆自身速度的影响,采用归一化处理,使得车辆在不同车速下经过同一路况时会具有相似的特征;
处理车辆自身在加减速的情况下产生的俯仰角度变化,在处理俯仰角度变化前,先对车辆自身加减速产生的俯仰角进行过滤。
进一步地,上述技术方案中,对y轴方向上产生的加速度设置阈值进行筛选包括:
根据路口进行左右转弯的时候相比于直线行驶时产生的加速度大很多的原理对于加速度的大小进行过滤;根据左右转弯时加速度信号会持续相当长一段时间原理对加速度信号的持续时间长度进行过滤。
进一步地,上述技术方案中,对车辆自身加减速产生的俯仰角进行过滤包括:针对俯仰角的大小进行滤波处理,将俯仰角变化值在1°-2°的俯仰角进行筛除;以及根据IMU产生俯仰角后持续的时间长短进行处理,将俯仰角产生后持续的时间较短的俯仰角进行滤除。
进一步地,专业采集车依据上述两个步骤制作好针对外界环境的高精度地图,其余的车辆均可以使用高精度地图作为已知条件,在地图环境已知情况下对车辆单独进行定位。
进一步地,所述单独定位的模式包含以下几个步骤:
根据GPS信息初步定位车辆在全局坐标中的位置,将激光雷达的观测信息与已知的地图信息进行匹配,得到车辆自身较为准确的位置;在运动过程中激光雷达数据融合IMU信息不断更新自身位置与姿态,确定车辆在地图中的位置。
一种用于激光SLAM的数据采集及处理装置,其特征在于:
在乘用车车辆的顶部安装激光雷达和GPS,在近似车辆的质心位置安装IMU,通过设置于车辆上的工控机接收并处理数据;将激光雷达观测到的信息与已知的地图信息进行特征匹配,上下坡、左右路口转弯以及路面不平这些工况时,激光雷达数据融合IMU信息不断更新自身位置与姿态,确定车辆在地图中的位置。
本发明相对于现有技术,具有如下有益效果:
在建图和定位的过程中,车辆在经过一些特殊路段时,会出现特征不明显的情况。因为仅仅依靠激光雷达数据提取出的特征物在大场景范围内可能会重复出现,具有一定地相似性,从而导致误匹配现象的出现。同时激光雷达和IMU在运动的过程中均会出现累计误差的现象。因此,我们通过IMU 在经过这些特殊路段时采集这些特殊信息,在经过处理之后应用于建图和定位。可以减少在建图过程中无匹配的现象,也可以有效减少在定位过程中累积误差的影响。可以有效地提高车辆在建图和定位过程中的精度。
附图说明
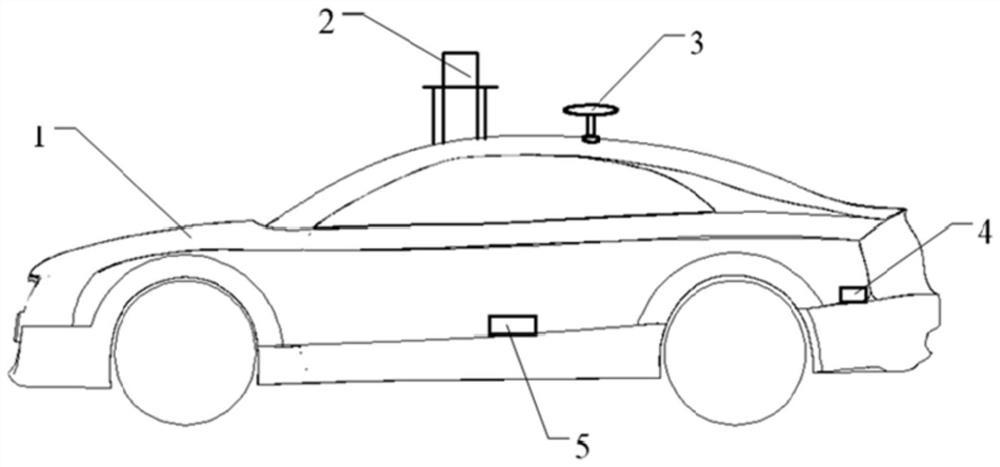
图1为本发明用于激光SLAM的数据采集及处理装置的结构图。
图2为本发明用于激光SLAM的数据采集及处理方法和装置实施例中车辆左转示意图。
图3为本发明用于激光SLAM的数据采集及处理方法和装置实施例中车辆经过不平路面示意图。
图4为本发明用于激光SLAM的数据采集及处理方法和装置实施例中车辆上坡示意图。
图中:1-车辆,2-激光雷达,3-GPS,4-工控机,5-IMU。
具体实施方式
下面将结合附图对本发明用于激光SLAM的数据采集及处理方法和装置作进一步的说明。
如图1,根据本发明实施的用于激光SLAM的数据采集及处理装置中,激光雷达2和GPS 3安装在乘用车车辆1的顶部, IMU5安装在近似车辆1的质心位置。车辆尾部放置工控机4。 工控机4用于接收并处理数据。
本发明用于激光SLAM的数据采集及处理方法,一是对同时建图和定位所需要的信息进行采集,二是对采集到的数据进行数据处理。
在数据采集过程中,激光雷达安装在乘用车的顶部,用于实时测量周围环境的点云信息,为建图和定位提供数据来源。IMU安装在近似乘用车的质心位置,实时地测量车辆在行驶过程中的状态,用于减少点云信息由于车辆运动产生的运动畸变。GPS用于接收车辆在坐标系下的位置,用于减少激光雷达和IMU在建图过程中产生的累计误差。除此之外,IMU还需要在上下坡、左右转弯以及路过不平路面等一些特殊时刻产生的特征数据:比如车辆在左右转弯的时候,y轴会有明显的加速度,如图2;在经过不平路面的时候,z轴会出现明显的加速度,如图3;在上下坡的过程中,俯仰角会出现明显变化,如图4。这些信息将使点云数据在不同的特殊路段时具有更多明显的特征。
在数据处理过程中,需要将不同传感器接收到的数据进行时间同步与空间同步。因为不同的传感器会有自己的采样频率,在融合的过程中,只能针对相同时间戳的数据进行处理。同时我们是想得到车辆的位姿,不是单独传感器的位置。所以我们需要将以传感器自身为坐标原点的坐标系统一转换到车辆坐标系中,用于表达车辆在世界坐标系中的位置。在这个过程中,针对上下坡、左右路口转弯以及路面不平这些工况,需要进行特殊处理。在上下坡的情况下,记录IMU信息的俯仰角,在左右转弯的时候记录IMU的y轴加速度,在经过路面不平的路段时,记录IMU信息的Z轴加速度。
这些信息除了因为路况的不同会产生变化之外,还和自身的状态有关。如图2,对于车辆在经过不同路口左右转弯时,会产生y轴方向的加速度。而对于车辆在直线行驶时也会出现一定次数的左右移动,会产生一些干扰的y轴方向上的加速度。故我们需要对于y轴方向上产生的加速度设置阈值进行筛选。一是对于加速度的大小进行过滤;在路口进行左右转弯的时候相比于直线行驶时产生的加速度会大很多;二是对于加速度信号产生的时间长度,在左右转弯的时候该信号会持续相当长的一段时间,故需要对信号持续的时间进行过滤。
而对于车辆自身在加减速的情况下也会产生俯仰角度的变化,如图4,因此在处理上下坡时俯仰角的变化前,应该先对车辆自身加减速产生的俯仰角进行过滤。一是针对俯仰角的大小进行滤波处理,由于车辆自身在加减速的时候产生的俯仰角变化一般很小,大概在1°-2°。故将这些值较小的俯仰角进行筛除;二是针对IMU产生俯仰角后持续的时间,车辆自身突然的加减速一般都是突发性质的,持续时间相比于经过长路段的上下坡时会短许多,故针对俯仰角产生持续的时间较短的进行滤除。
对于如图2转弯产生的y轴加速度和如图3路过不平的路面时产生的z轴加速度还与自身车速有关。车辆在速度不同经过路况相同时,会产生不一样的信息。因此我们还应考虑车辆自身速度的影响。采用归一化处理,让车辆在不同车速下经过同一路况时会具有相似的特征。
将这些信息进行处理之后传递给点云数据。在其他工况,点云信息不包含上述描述的IMU信息。
基于这两部分,专业采集车可以制作好针对外界环境的高精度地图。其余的车辆均可以使用高精度地图作为已知条件,在地图环境已知情况下可以对车辆单独进行定位。
单独定位的模式中又主要包含以下几个步骤:
根据GPS信息初步定位车辆在全局坐标中的位置;
将观测信息与已知的地图信息进行匹配;
更新车辆的位姿 。
具体地:
首先,通过接收到的GPS信号粗略地确定车辆自身处在全局坐标系的位置。
通过将此时激光雷达观测到的信息与已知的地图信息进行特征匹配,就可以得到车辆自身较为准确的位置。在运动过程中激光雷达数据融合IMU信息不断更新自身位置与姿态,确定车辆在地图中的位置。这个部分可以保证,即使GPS信号不好的情况下,也可以对车辆自身进行准确的位姿估计。
同样,车辆运动到上述描述的相同工况下,会发生类似的行为,所以IMU会产生类似的信号。将此时具有IMU信息的点云信息和已构建好的高精度地图进行匹配,此时的数据具有很明显的特征,可以防止依靠点云数据进行匹配而产生的误匹配现象。因为仅仅依靠激光雷达数据提取出的特征物在大场景范围内可能会重复出现,具有一定地相似性,从而导致误匹配现象的出现。同时激光雷达和IMU在运动的过程中均会出现累计误差的现象,将具有IMU特征的点云信息与具有IMU特征的地图信息匹配,进行校正可以进一步减少激光雷达和IMU在运动过程中产生的累积误差,可以更加快速准确地完成信息匹配。
本领域的技术人员容易理解,以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种用于激光SLAM的数据采集及处理方法和装置
- 一种用于激光测风数据采集的数据采集装置