一种安全带悬挂装置及安全预警方法
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及电力安全作业技术领域,特别是涉及一种安全带悬挂装置及安全预警方法。
背景技术
安全带是防止高处作业人员发生坠落或发生坠落后将作业人员安全悬挂的个体防护装备,在变电站进行高处作业时需要正确使用安全带。随着变电站的扩建,站内高度大于1.5米的设备增多,高处作业和安全带的正确使用成为安全作业的重点督察内容,在没有脚手架或者在没有栏杆的脚手架上工作,高度超过1.5米时应使用安全带。
安全带需要采用高挂低用的方式挂在牢固的挂点,以减少作业人员发生高处坠落的风险。但是在变电站高度超过2米的开关柜柜顶进行高处作业时,由于没有专门的安全带挂点,因此需要装设可供安全带高挂低用的悬挂装置。现有的安全带悬挂装置未针对开关柜的高处作业进行特殊设计,在使用时悬挂装置需要和高处作业的绝缘梯进行配合,在两者放置位置不合适的情况下不便于作业人员的高处作业。
如授权公告号为CN204864614U的中国实用新型专利公开了一种伸缩式安全带挂钩支架,包括固定支撑台、下支柱、上支柱和横梁,下支柱内部中空,下支柱下端与固定支撑台连接,上支柱下端从下支柱上端套入下支柱内部,横梁一端与上支柱上端连接,上支柱顶部设有挂环,横梁上焊接有挂钩,上支柱上设有至少两个通孔,下支柱上端设有一个通孔,固定螺栓穿过下支柱和上支柱的通孔,将上支柱和下支柱固定连接在一起。
上述的安全带挂钩支架采用“厂”字形结构,支架整体单侧支撑受力,稳定性不足,当固定支撑台的重量不足时存在倾倒的风险;同时挂钩采用焊接方式固定在横梁上,为固定式悬挂点,作业人员在进行移动时需要不断调整安全带悬挂的位置,在调整悬挂位置时,作业人员存在短时失去安全带保护的风险。
发明内容
本发明的目的是:提供一种安全带悬挂装置,以解决现有技术中的安全带挂钩支架存在倾倒风险,作业人员调整位置时存在短时失去保护的风险的问题;本发明还提供了一种安全预警方法。
为了实现上述目的,本发明提供了一种安全带悬挂装置,包括固定底座、绝缘梯和挂架;
所述固定底座间隔布置有两组,两组所述固定底座上均设置有所述绝缘梯,两组所述绝缘梯的顶端之间连接有所述挂架,所述固定底座、所述绝缘梯与所述挂架成龙门架型结构;
所述挂架包括水平悬杆和布置在所述水平悬杆的两端的支撑杆,两组所述支撑杆的底端与各所述绝缘梯一一对应连接,所述水平悬杆供安全带悬挂;
还包括布置在两组所述绝缘梯的顶端之间的安全预警系统,所述安全预警系统包括摄像设备、图像处理器、控制器和声光报警设备,所述摄像设备、所述图像处理器、所述声光报警设备均与所述控制器信号连接。
优选地,所述绝缘梯的顶端设置有套管,所述支撑杆的底端插装在所述套管内,所述套管与所述绝缘梯之间、所述套管与所述支撑杆之间均通过插销连接。
优选地,所述固定底座上设置有套筒和用于斜向支撑所述套筒的斜撑,所述绝缘梯的底端插装在所述套筒内,所述套筒上还设置有用于固定所述绝缘梯的插销。
优选地,两组所述绝缘梯的顶端之间还连接有固定杆,所述固定杆与所述水平悬杆平行间隔布置。
优选地,所述固定底座的底部设置有滑轮,所述固定底座上还转动装配有支腿,所述支腿在转动行程中具有支撑在地面以防止所述滑轮转动的支撑状态和离开地面以使滑轮转动的收纳状态。
优选地,所述支腿包括转动架和支腿本体,所述固定底座上设置有铰接座,所述支腿本体布置在所述转动架的前端,所述转动架的后端与所述铰接座铰接,所述铰接座与所述转动架之间还设置有用于对所述转动架限位的限位结构。
优选地,所述限位结构包括设置在所述铰接座上的第一限位孔和第二限位孔、设置在所述转动架上的穿孔、限位螺栓,所述第一限位孔位于所述铰接座的铰接轴的后侧,所述第二限位孔位于所述铰接座的铰接轴的下侧,所述转动架转动至支撑状态时所述穿孔与所述第一限位孔同轴,所述转动架转动至收纳状态时所述穿孔与所述第二限位孔同轴。
本发明还提供了一种安全预警方法,采用上述任一项技术方案所述的安全带悬挂装置,包括以下步骤:
S1,摄像设备上实时获取包含开关柜柜顶两侧和挂架的水平悬杆的图片,并将图片发送给图像处理器;
S2,图像处理器识别出在绝缘梯上进行高处作业的人数Nr和水平悬杆上悬挂的安全带数量Ng,并将两个数据发送至控制器;
S3,控制器判断Nr与Ng是否相同,若Nr=Ng则返回步骤S1,若Nr>Ng则控制器向声光报警设备发出报警信号,进入步骤S4;
S4,声光报警设备进行声光报警,然后返回步骤S1进行循环。
优选地,步骤S4中,定义由步骤S1至步骤S4中声光报警设备开始发出报警所用时间为Tt,声光报警设备持续发出声光报警的持续时间段为Ta,Ta>Tt。
优选地,步骤S2中,图像处理器以作业人员的安全帽、水平悬杆上的安全带挂钩为特征量判断进行高处作业的人数Nr和水平悬杆上悬挂的安全带数量Ng。
本发明实施例一种安全带悬挂装置及安全预警方法与现有技术相比,其有益效果在于:固定底座上固定两组绝缘梯,两组绝缘梯、固定底座以及挂架整体形成龙门架型结构,通过多点支撑的形式增加了整个悬挂装置的稳定性,防止挂架倾倒;挂架的水平悬杆通过两端的支撑杆与绝缘梯连接,水平悬杆的整段均可悬挂安全带,取消挂钩等结构,两端的支撑杆可以对安全带进行限位,安全带可以在水平悬杆上随着作业人员的移动进行自由的移动,无需作业人员手动调整安全带悬挂位置,从而消除了调整悬挂位置时失去安全带保护的风险;在两个绝缘梯之间还布置安全预警系统,利用摄像设备获取作业人员的图像信号,利用图像处理器对图像信号进行处理并形成控制器可读取的信号,当作业人员没有佩戴安全带时控制器控制声光报警设备进行报警,保证了作业的安全性。
附图说明
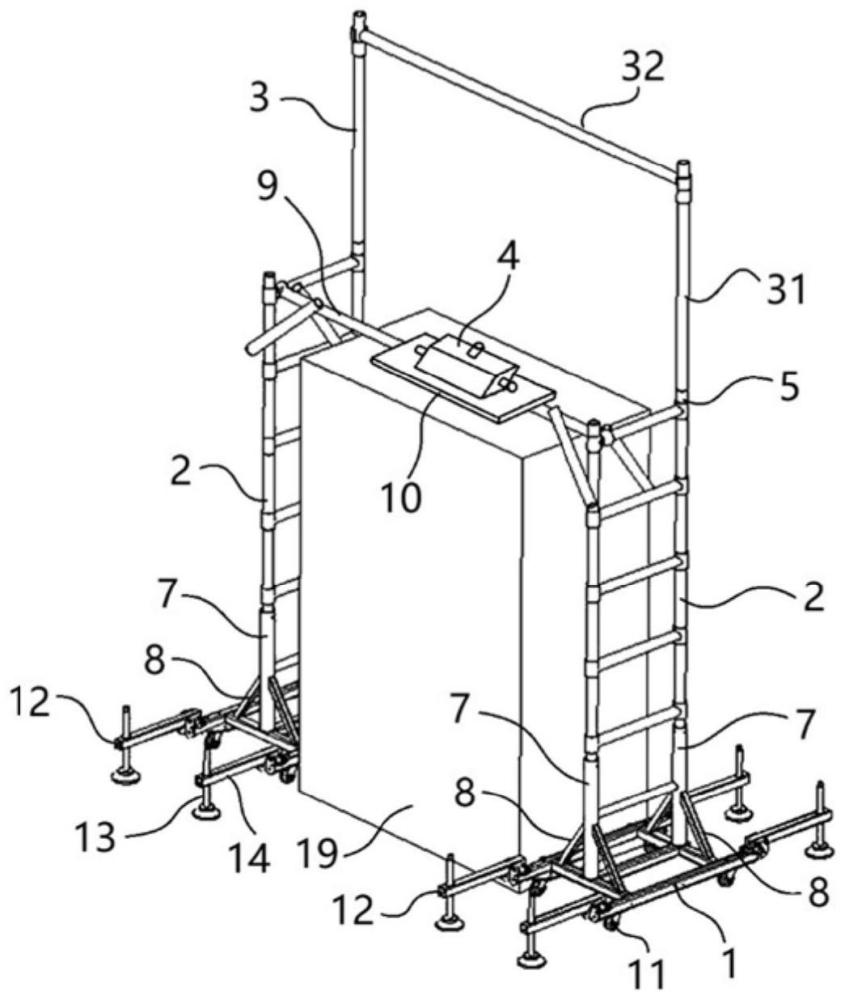
图1是本发明的安全带悬挂装置的结构示意图;
图2是图1的安全带悬挂装置的支腿处的放大结构示意图;
图3是图1的安全带悬挂装置的支撑杆与绝缘梯的装配示意图;
图4是本发明的安全带悬挂装置的支腿处于收纳状态的结构示意图;
图5是本发明的安全预警方法的流程图。
图中,1、固定底座,2、绝缘梯,3、挂架,31、支撑杆,32、水平悬杆,4、安全预警系统,5、套管,6、插销,7、套筒,8、斜撑,9、固定杆,10、安装板,11、滑轮,12、支腿,13、支腿本体,14、转动架,15、铰接座,16、第一限位孔,17、第二限位孔,18、限位螺栓,19、开关柜。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
本发明的一种安全带悬挂装置的优选实施例,如图1至图4所示,该安全带悬挂装置包括固定底座1、绝缘梯2、挂架3和安全预警系统4,固定底座1用于支撑布置在地面上,支撑固定整个装置,绝缘梯2用于供作业人员攀登高处作业,挂架3用于供作业人员悬挂安全带,满足高空作业的需求。
固定底座1包括供有两组,两组固定底座1间隔布置,两组固定底座1之间形成用于容纳开关柜19的容纳空间,操作人员攀登上绝缘梯2后可以对固定底座1之间的开关柜19的顶部进行作业。两组固定底座1互为对称布置,其具体结构相同,固定底座1整体采用钢结构,以提高固定底座1的结构强度。
两组固定底座1上均设置有绝缘梯2,绝缘梯2的底端与固定底座1连接,绝缘梯2的顶端与挂架3连接。绝缘梯2用于抬高作业人员的工作高度,作业人员可站立在绝缘梯2上进行高空作业,两组绝缘梯2的结构相同,绝缘梯2的具体结构为现有技术,此处不作详细叙述。
两组绝缘梯2的顶端之间连接有挂架3,固定底座1、绝缘梯2与挂架3成龙门架型结构,在开关柜19的顶部进行作业时,开关柜19位于挂架3的下方。挂架3的两端均由绝缘梯2以及固定底座1支撑,通过多点支撑的形式增加了整个挂架3的稳定性,可以避免当作业人员移动到挂架3的一端时发生倾倒。
挂架3包括水平悬杆32和支撑杆31,支撑杆31布置在水平悬杆32的两端,水平悬杆32的轴向两端均与支撑杆31连接,水平悬杆32和两个支撑杆31之间形成龙门型结构,增加了挂架3整体的结构强度。两组支撑杆31的底端与两组绝缘梯2一一对应连接,两组绝缘梯2对支撑杆31进行支撑,提升装置的稳定性。在本实施例中,水平悬杆32与支撑杆31均采用绝缘材料制作,降低触电风险。
水平悬杆32用于供安全带悬挂,水平悬杆32整体水平布置,支撑杆31竖直布置,水平悬杆32上不设置固定的挂环、挂钩32等结构,水平悬杆32的整段均可以用于悬挂安全带,并且通过两端竖直的支撑杆31对安全带进行限位,保证安全带在水平悬杆32整段范围内的自由移动,安全带可以在水平悬杆32上随着作业人员的移动进行自由的移动,无需作业人员手动调整安全带悬挂位置。
安全预警系统4布置在两组绝缘梯2的顶端之间,安全预警系统4包括摄像设备、图像处理器、控制器和声光报警设备,摄像设备、图像处理器、声光报警设备均与控制器信号连接。安全预警系统4用于检测作业人员的安全带佩戴情况,在未佩戴安全带时通过声光报警设备进行报警,提高作业的安全性。
安全预警系统4工作时,摄像设备用于实时采集开光柜两边的绝缘梯2以及挂架3的水平悬杆32的图片,并将图片信号传输给图像处理器;图像处理器通过成熟的图像处理算法识别出在绝缘梯2上进行高处作业的人数和水平悬杆32上悬挂的安全带数量,并将两个数据发送至控制器。
控制器判断绝缘梯2上进行高处作业的人数与水平悬杆32上悬挂的安全带数量是否相同,当安全带数量小于进行高处作业的人数时,表面有工作人员未佩戴安全带,控制器向声光报警设备传输报警信号,声光报警设备进行报警,提醒作业人员安全佩戴安全带,从而提高高空作业的安全性。
在本实施例中,图像处理器采用成熟的图像识别算法如卷积神经网络(CNN)、支持向量机(SVM)等对开关柜19顶部的作业人员和水平悬杆32上所悬挂安全带的照片进行训练,以作业人员的安全帽、水平悬杆32上的安全带挂钩32为特征量。得到训练好的模型后,图像处理器可采用该模型对现场拍摄的照片进行图像识别,识别出的安全帽的数量即为作业人员数量,识别出水平悬杆32上安全带挂钩32的数量即为安全带的数量。
该安全带悬挂装置的固定底座1上固定两组绝缘梯2,两组绝缘梯2、固定底座1以及挂架3整体形成龙门架型结构,通过多点支撑的形式增加了整个悬挂装置的稳定性,防止挂架3倾倒;挂架3的水平悬杆32通过两端的支撑杆31与绝缘梯2连接,水平悬杆32的整段均可悬挂安全带,取消挂钩32等结构,两端的支撑杆31可以对安全带进行限位,安全带可以在水平悬杆32上随着作业人员的移动进行自由的移动,无需作业人员手动调整安全带悬挂位置,从而消除了调整悬挂位置时失去安全带保护的风险;在两个绝缘梯2之间还布置安全预警系统4,利用摄像设备获取作业人员的图像信号,利用图像处理器对图像信号进行处理并形成控制器可读取的信号,当作业人员没有佩戴安全带时控制器控制声光报警设备进行报警,保证了作业的安全性。
优选地,绝缘梯2的顶端设置有套管5,支撑杆31的底端插装在套管5内,套管5与绝缘梯2之间、套管5与支撑杆31之间均通过插销6连接。
绝缘梯2的顶端与支撑杆31的底端之间通过套管5连接,利用插销6对绝缘梯2和支撑杆31进行固定,使绝缘梯2和挂架3一体装设,便于作业人员的高处作业。采用插销6和套管5来固定连接绝缘梯2和支撑杆31,也简化了挂架3的装配方式。
优选地,固定底座1上设置有套筒7和用于斜向支撑套筒7的斜撑8,绝缘梯2的底端插装在套筒7内,套筒7上还设置有用于固定绝缘梯2的插销6。
套筒7用于放置绝缘梯2,套筒7插销6可以对绝缘梯2的底部进行固定,避免绝缘梯2脱离套筒7。每个套筒7的两侧与固定底座1之间均焊接固定斜撑8,可以稳固套筒7,增加绝缘梯2的稳定性。
优选地,两组绝缘梯2的顶端之间还连接有固定杆9,固定杆9与水平悬杆32平行间隔布置。
固定杆9与绝缘梯2平行间隔布置,使得每组绝缘梯2的顶端两侧均连接为整体,固定杆9、挂机和绝缘梯2形成整体,使绝缘梯2受力平衡,避免水平悬杆32位于绝缘梯2的一侧而使绝缘梯2发生偏转。
在本实施例中,在固定杆9上设置安装板10,安全预警系统4固定布置在安装板10上,安全预警系统4位于开关柜19的顶部,便于采集开关柜19顶部两侧的作业人员的图像以及水平悬杆32上的安全带图像。
优选地,固定底座1的底部设置有滑轮11,固定底座1上还转动装配有支腿12,支腿12在转动行程中具有支撑在地面以防止滑轮11转动的支撑状态和离开地面以使滑轮11转动的收纳状态。
每组固定底座1的底部均布置有四组滑轮11,四组滑轮11用于移动固定底座1,改变该安全带悬挂装置的位置。支腿12转动装配在固定底座1上,当支腿12转动至支撑状态时,可以支撑固定底座1,增加固定底座1的稳定性,防止滑轮11移动,便于作业人员高空作业;当支腿12转动至收纳状态时,滑轮11支撑在地面上,作业人员可以推动固定底座1移动并改变位置。
优选地,支腿12包括转动架14和支腿本体13,固定底座1上设置有铰接座15,支腿本体13布置在转动架14的前端,转动架14的后端与铰接座15铰接,铰接座15与转动架14之间还设置有用于对转动架14限位的限位结构。
转动架14与固定底座1的铰接座15之间铰接,转动架14转动时可以改变支腿本体13的位置,调节支腿本体13支撑在地面上或者离开地面,使的支腿12在支撑状态与收纳状态之间改变。限位结构可以限定转动架14的位置,避免作业人员在作业时转动架14转动。
在本实施例中,支腿本体13与转动架14之间采用螺纹连接,通过旋转支腿本体13可以调节支腿本体13的高度,适于在地面不平的状态下使用。
优选地,限位结构包括设置在铰接座15上的第一限位孔16和第二限位孔17、设置在转动架14上的穿孔、限位螺栓18,第一限位孔16位于铰接座15的铰接轴的后侧,第二限位孔17位于铰接座15的铰接轴的下侧,转动架14转动至支撑状态时穿孔与第一限位孔16同轴,转动架14转动至收纳状态时穿孔与第二限位孔17同轴。
第一限位孔16、第二限位孔17和铰接座15的铰接轴之间成90度,限定转动架14在90度的范围内转动。转动架14转动至支撑状态时,穿孔与第一限位孔16同轴,限位螺栓18穿装在穿孔与第一限位孔16中,使转动架14与铰接座15连接,使转动架14保持在支撑状态;转动架14转动至收纳状态时,穿孔与第二限位孔17同轴,限位螺栓18穿装在穿孔与第二限位孔17中,使转动架14与铰接座15连接,使转动架14保持在收纳状态。
采用第一限位孔16、第二限位孔17、穿孔和限位螺栓18形成限位结构,对转动架14的转动位置进行限定,简化了限位结构的装配形式,便于作业人员操作。
本发明还提供了一种安全预警方法,如图5所示,采用上述任一实施例中的安全带悬挂装置,包括以下步骤:
S1,摄像设备上实时获取包含开关柜19柜顶两侧和挂架3的水平悬杆32的图片,并将图片发送给图像处理器;
S2,图像处理器识别出在绝缘梯2上进行高处作业的人数Nr和水平悬杆32上悬挂的安全带数量Ng,并将两个数据发送至控制器;
S3,控制器判断Nr与Ng是否相同,若Nr=Ng则返回步骤S1,若Nr>Ng则控制器向声光报警设备发出报警信号,进入步骤S4;
S4,声光报警设备进行声光报警,然后返回步骤S1进行循环。
步骤S1中,摄像设备具体有三组,三组摄像设备分别采集开关柜19柜顶两侧和挂架3的水平悬杆32的图片,以保证准确检测同一时刻进行高处作业的人数以及安全带数量。
步骤S3中,控制器通过比较的方式判断在绝缘梯2上进行高处作业的人数与水平悬杆32上悬挂的安全带数量是否相同,Nr-Ng=0则两者数量相同,Nr-Ng>0则表示人数大于安全带数量。
步骤S4中,声光报警设备接收控制器传输的报警信号并在一定时间段内持续发出声光报警,通过延长声光报警的时间提醒人们安全作业。
优选地,步骤S4中,定义由步骤S1至步骤S4中声光报警设备开始发出报警所用时间为Tt,声光报警设备持续发出声光报警的持续时间段为Ta,Ta>Tt。
设置时间Ta>Tt可以保证上一次声光报警能够持续到下一次声光报警设备接收到控制器的命令,保证在作业人员没有系好安全带的这段时间内持续报警。
例如,在t1时刻,声光报警设备开始报警。此时安全预警系统4又从步骤一开始循环,只有在经过Tt时刻(即在t1+Tt时刻),声光报警设备才会再次接收控制器的命令开始报警。如果声光报警设备的持续时间Tt>Ta,则在t1+Ta到t1+Tt时间段内声光报警设备将不报警,存在安全隐患。
优选地,步骤S2中,图像处理器以作业人员的安全帽、水平悬杆32上的安全带挂钩32为特征量判断进行高处作业的人数Nr和水平悬杆32上悬挂的安全带数量Ng。
在本实施例中,图像处理器采用成熟的图像识别算法如卷积神经网络(CNN)、支持向量机(SVM)等对开关柜19顶部的作业人员和水平悬杆32上所悬挂安全带的照片进行训练,以作业人员的安全帽、水平悬杆32上的安全带挂钩32为特征量。得到训练好的模型后,图像处理器可采用该模型对现场拍摄的照片进行图像识别,识别出的安全帽的数量即为作业人员数量,识别出水平悬杆32上安全带挂钩32的数量即为安全带的数量。
综上,本发明实施例提供一种安全带悬挂装置及安全预警方法,其固定底座上固定两组绝缘梯,两组绝缘梯、固定底座以及挂架整体形成龙门架型结构,通过多点支撑的形式增加了整个悬挂装置的稳定性,防止挂架倾倒;挂架的水平悬杆通过两端的支撑杆与绝缘梯连接,水平悬杆的整段均可悬挂安全带,取消挂钩等结构,两端的支撑杆可以对安全带进行限位,安全带可以在水平悬杆上随着作业人员的移动进行自由的移动,无需作业人员手动调整安全带悬挂位置,从而消除了调整悬挂位置时失去安全带保护的风险;在两个绝缘梯之间还布置安全预警系统,利用摄像设备获取作业人员的图像信号,利用图像处理器对图像信号进行处理并形成控制器可读取的信号,当作业人员没有佩戴安全带时控制器控制声光报警设备进行报警,保证了作业的安全性。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。