一种陆空两栖高层建筑系泊侦察灭火机器人及作业方法
文献发布时间:2024-01-17 01:21:27
技术领域
本发明属于消防机器人技术领域,具体涉及一种陆空两栖高层建筑系泊侦察灭火机器人及作业方法。
背景技术
消防机器人作为特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用。现场指挥人员可以利用其进行先期侦察及压制,并根据其反馈结果,及时对灾情做出科学判断,从而对灾害事故现场工作做出正确、合理地决策。国内外投入使用的消防机器人一般由带动力的全地形底盘作为行驶与载重基体,在其之上装载侦察设备、灭火设备、救援设备等进行各种特种救援作业,显著提高了处理恶性事故的能力并大大减少了人员的伤亡。
如今,高层建筑越来越多,由于高层建筑的特性,在高层建筑内发生火灾后,通常采用无人机进行高空侦察。传统无人机受载重和飞行稳定性问题的限制,不能靠待侦察建筑物太近,只能远距离视频侦察,不能看清建筑物内部情况,导致侦察效果大打折扣,影响对火灾现场的救援判断。
如授权公告号为CN110180112B的发明专利公开了一种无人机与消防机器人协同侦察灭火作业方法,包括无人侦察机释放步骤,无人侦察机、机器人控制台、无人机控制台对灭火侦察机器人空间定位步骤,以及灭火侦察机器人、无人侦察机、机器人控制台、无人机控制台协作侦察和灭火步骤。无人侦察机与灭火侦察机器人独立设置,且无人侦察机不能抵近火源现场对高层建筑物内部进行实时侦察。
申请公布号为CN113681577A的发明专利公开了一种分体式侦察探测机器人及方法,叠翼型无人机安装在发射筒内,发射筒内设置有用于发射叠翼型无人机的燃气弹射装置;使四足机器人将搭载的叠翼型无人机,通过叠翼型无人机对需要探测的区域进行空中侦察探测,四足机器人进行陆地探测,具备实现陆、空两种探测模式,能够适应多种复杂的工作环境。该方案中无人机通过弹射方式起飞,起飞方式稳定性差,且无人侦察机不能抵近火源现场对高层建筑物内部进行实时侦察。
发明内容
本发明的目的在于提供一种陆空两栖高层建筑系泊侦察灭火机器人及作业方法,实现机器人对无人机的稳定释放以及无人机对待侦察物壁面的稳定吸附,提高机器人的侦察能力及数据准确性,提高机器人的救援能力。
本发明解决其技术问题所采用的技术方案是:一种陆空两栖高层建筑系泊侦察灭火机器人,包括:
移动平台,用于承载安装机器人的各部件并带动机器人移动;
安装于移动平台上的电控能源模块,用于为机器人的各部件提供能源并驱动控制各部件运行;
安装于移动平台上的侦察模块,用于对机器人前方、后方、空中进行全方位侦察监测,侦察模块与电控能源模块电性连接;
灭火系统,安装于移动平台的前部,灭火系统与电控能源模块电性连接,灭火系统用于机器人对火源进行灭火操作;
重载救援作业系统,安装于移动平台的后部,用于机器人额救援作业,重载救援作业系统与电控能源模块电性连接;
无人机储存释放装置,安装于移动平台的下部,无人机储存释放装置与电控能源模块电性连接;
设置于无人机储存释放装置上的高空系泊无人机系统,高空系泊无人机系统能够从无人机储存释放装置上释放起飞,实现高空侦察作业;
控制台,与电控能源模块及高空系泊无人机系统无线连接,用于对机器人及高空系泊无人机系统进行远程控制。
进一步地,所述移动平台包括履带模组、立柱、主体、承载基板、载荷板,主体的顶部安装有承载基板,承载基板的上表面固定连接有若干立柱,立柱的顶部固定连接有载荷板,承载基板和载荷板用于安装电控能源模块,灭火系统安装于载荷板上表面的前部,重载救援作业系统安装于载荷板上表面的后部,无人机储存释放装置固定连接于承载基板的底部,履带模组设有两组,对称安装于主体的两侧,每组履带模组至少包括履带、驱动轮、承重轮、悬挂组件、导向从动轮,悬挂组件的下方连接有若干承重轮,履带设置并包络于驱动轮、承重轮、导向从动轮的外侧,驱动轮与电控能源模块中的驱动组件连接并由驱动组件驱动旋转,带动履带滚动,进而带动导向从动轮旋转,实现与驱动轮、承重轮共同支撑履带滚动运动。
进一步地,所述电控能源模块包括激光雷达、控制组件、驱动组件、能源组件、无线通讯组件,激光雷达、控制组件、无线通讯组件均设置于承载基板上,驱动组件和能源组件设置于载荷板上,激光雷达、驱动组件、能源组件、无线通讯组件均与控制组件电性连接,激光雷达用于实现对现场环境建模、运动避障和路径规划,控制组件用于实现对机器人各部件的运动控制,驱动组件用于驱动移动平台前进、后退和转向,能源组件用于为机器人各部件提供能源,无线通讯组件用于与控制台实现无线通讯连接。
进一步地,所述侦察模块包括前置侦察组件、全向侦察探测组件、高空侦察组件一、高空侦察组件二、救援侦察组件,前置侦察组件设置于移动平台的承载基板的前侧,全向侦察探测组件包括探测传感模组、第一全向云台、探测组件底座,探测组件底座固定安装于移动平台载荷板上,探测传感模组通过第一全向云台连接于探测组件底座上;高空侦察组件一包括侦察模组和第二全向云台,侦察模组通过第二全向云台安装于高空系泊无人机系统的顶部;救援侦察组件包括激光测距组件、上视觉模块、下视觉模块,激光测距组件和上视觉模块固定安装于重载救援作业系统前端的上侧,下视觉模块固定安装于重载救援作业系统前端的下侧。
进一步地,所述灭火系统包括灭火炮、回转云台、灭火炮底座、介质箱、泵送组件,灭火炮底座固定安装于移动平台载荷板的前部,灭火炮通过回转云台安装于灭火炮底座上,介质箱和泵送组件安装于移动平台的承载基板上,灭火炮通过管路与泵送组件连接,泵送组件与介质箱连接,介质箱用于盛放灭火介质,包括但不限于水、干粉或泡沫灭火剂;回转云台、泵送组件与电控能源模块中的控制组件电性连接。
进一步地,所述重载救援作业系统包括作业机械爪、多自由度机械臂、重载回转底座,重载回转底座安装固定于移动平台的载荷板的后部,多自由度机械臂的一端连接于重载回转底座上,多自由度机械臂的另一端与作业机械爪连接,救援侦察组件安装于作业机械爪上,作业机械爪与电控能源模块的控制组件电性连接。
进一步地,重载回转底座包括上支撑架、支撑立柱、回转支撑环、回转支撑本体、支撑筋、固定基座、固定套、导轨模组、重载回转电机,作业机械爪、重载回转电机与电控能源模块中的控制组件电性连接,固定基座固定安装于载荷板的上表面,固定基座的一侧固定连接有回转支撑本体,回转支撑本体的正上方设有回转支撑环,回转支撑环与回转支撑本体之间通过若干支撑筋连接固定,回转支撑环的两端分别通过固定套固定安装于固定基座的上表面,重载回转电机的底部固定安装于固定基座的上表面,上支撑架设置于重载回转电机的顶部,重载回转电机的输出轴与上支撑架连接,上支撑架的上表面与多自由度机械臂的底部连接固定,上支撑架的外侧底部与支撑立柱的上端连接固定,支撑立柱的下端设有导轨模组,支撑立柱通过导轨模组与回转支撑环滑动连接,重载回转电机运转,能够带动上支撑架及多自由度机械臂沿回转支撑环转动。
进一步地,所述导轨模组包括滚珠、第一弹性元件、第二弹性元件、导向孔、锁紧螺栓、导向槽,导向槽设置于支撑立柱的底部,导向槽用于卡接于回转支撑环的上部,且导向槽与回转支撑环相适应,导向槽的两侧分别开设有导向孔,导向孔内设有锁紧螺栓,锁紧螺栓上套设有第二弹性元件,第二弹性元件外侧套设有第一弹性元件,锁紧螺栓的内端设有滚珠,滚珠一端与回转支撑环接触,另一端与第一弹性元件和第二弹性元件接触。
进一步地,所述高空系泊无人机系统包括无人机、载荷起落架、回转探测组件、自适应壁面系泊组件,载荷起落架与无人机储存释放装置连接,无人机与载荷起落架连接固定,无人机的底部连接有回转探测组件,自适应壁面系泊组件连接于回转探测组件的后端;无人机、回转探测组件、自适应壁面系泊组件均与控制台无线连接。
进一步地,无人机储存释放装置包括固定支架、滑台系统、同步推进支杆、滑移导向块、导向释放帽、释放顶座,固定支架固定安装于移动平台承载基板的底部,滑台系统的前端固定安装于固定支架的底部,滑台系统与机器人前进方向平行,且滑台系统的后端延伸至移动平台的后方外侧,滑台系统的后端设有限位挡块,同步推进支杆设有偶数个,两个为一组,每组同步推进支杆沿滑台系统前后设置,且每组的两个同步推进支杆分别对称设置于滑台系统的两侧,每组的两个同步推进支杆能够沿滑台系统移动,靠近固定支架的一组同步推进支杆与电控能源模块中的控制组件电气连接,同步推进支杆的顶部均设有滑移导向块,滑移导向块用于支撑固定高空系泊无人机系统,靠近固定支架的一组同步推进支杆之间连接有释放顶座,靠近固定支架的一组同步推进支杆顶部的滑移导向块上固定连接有导向释放帽,导向释放帽为锥形,开口朝向远离固定支架的方向,导向释放帽与高空系泊无人机系统的载荷起落架相配合,实现高空系泊无人机系统储存、推进及释放。
进一步地,所述无人机包括机架、动力组件、螺旋桨、电控能源组件,电控能源组件设置于机架的中心内部,机架的外端固定连接有动力组件,螺旋桨与动力组件连接并由动力组件驱动运转,动力组件与控制台无线连接。
进一步地,载荷起落架包括第一支撑杆、连接挂件、起降支撑杆,起降支撑杆设有两根,对称设置于无人机两侧下方,起降支撑杆用于与无人机储存释放装置的滑移导向块支撑接触,且起降支撑杆能够在滑移导向块上滑动,起降支撑杆通过连接挂件与第一支撑杆的一端连接,第一支撑杆的另一端固定连接于无人机机架的侧壁上。
进一步地,回转探测组件包括转台、环形齿轮、驱动齿轮、基座、回转电机、滑台本体、同步带、同步滑块、位移检测模块、位移电机,回转电机、位移电机分别与控制台无线连接,位移检测模块固定安装于滑台本体的一端,位移电机固定于滑台本体的另一端,位移电机的输出轴与同步带连接,同步带套设于滑台本体的外侧,同步滑块固定连接于同步带上并能沿滑台本体滑动,位移电机带动同步带转动进而带动同步滑块前后移动,同步滑块的顶部与基座的底部固定连接,基座的底部还固定连接有回转电机,基座的上表面设有相互啮合连接的环形齿轮和驱动齿轮,回转电机的输出轴穿过基座后与驱动齿轮连接,环形齿轮与转台的底部固定连接,转台的顶部固定连接于无人机的机架的底部,回转电机转动,带动驱动齿轮转动,进而带动环形齿轮及依次连接的机架转动,实现无人机的转向。
进一步地,自适应壁面系泊组件包括主动摆向角调节组件、系泊主体、真空吸附模组、电磁吸附模组,真空吸附模组固定安装于系泊主体的一端,电磁吸附模组固定连接于真空吸附模组的下方,系泊主体的另一端与主动摆向角调节组件的一端连接,主动摆向角调节组件的另一端固定连接于滑台本体上安装位移检测模块的一端,主动摆向角调节组件与控制台无线连接。
进一步地,所述连接挂件包括第一横向挂板、第二纵向连接板、第三垂向挂板,起降支撑杆包括支撑杆主体、导向分离头,第一横向挂板固定连接于第一支撑杆的端部,第一横向挂板的两端分别通过第二纵向连接板与第三垂向挂板的顶部连接,第三垂向挂板的底部固定连接于支撑杆主体上,支撑杆主体的前端设有导向分离头,导向分离头与无人机储存释放装置的导向释放帽形状相适应且相互配合。
进一步地,所述主动摆向角调节组件包括第一铰链、第二铰链、铰轴、摆向电机、弹性支撑座、弹簧、导向凸台,第一铰链固定连接于滑台本体的端部,第二铰链固定连接于系泊主体上,第一铰链与第二铰链通过铰轴铰接连接,摆向电机固定安装于第二铰链的底部,摆向电机与控制台无线连接,摆向电机的输出轴与第二铰链连接,摆向电机转动带动第二铰链及系泊主体绕铰轴摆向转动,第一铰链两侧的滑台本体上分别固定安装有弹性支撑座,第二铰链两侧的系泊主体上分别固定安装有导向凸台,弹性支撑座与对应的导向凸台之间通过弹簧连接。
进一步地,真空吸附模组包括吸盘、主体框架、导流装置、导向支撑弹簧、阵列测距模组、导向弹簧固定座、气路管道、管道支撑座、气泵、固定座、摆动轴、摆动轴承,吸盘设有多个,每个吸盘的前端设有若干阵列测距模组,每个吸盘的顶部设有导流装置,导流装置通过气路管道与气泵连接,气泵安装于基座上,气泵与控制台无线连接,管道支撑座固定安装于滑台本体的底部,管道支撑座用于支撑固定气路管道,主体框架与系泊主体连接固定,每个吸盘的后端通过摆动轴与摆动轴承连接于主体框架的顶部和底部,吸盘能够绕摆动轴左右摆动,每个吸盘的两侧分别固定安装有导向弹簧固定座,相邻的两个吸盘的导向弹簧固定座之间通过导向支撑弹簧连接,最外侧的吸盘通过导向支撑弹簧与主体框架的侧壁连接。
进一步地,电磁吸附模组包括阵列电磁吸附单元、柔性垫、同步支架、电磁吸附基座、柔性筋,阵列电磁吸附单元、电磁吸附基座与吸盘数量一致且一一对应,每个阵列电磁吸附单元的端面上均设有柔性垫,每个阵列电磁吸附单元的后部分别固定连接于对应的电磁吸附基座上,电磁吸附基座通过同步支架固定连接于对应的吸盘的底部,相邻的电磁吸附基座之间通过柔性筋连接。
陆空两栖高层建筑系泊侦察灭火机器人的工作方法,包括以下步骤:
(1)机器人运动、灭火、救援步骤:
1)机器人移动:控制台控制电控能源模块中的驱动组件驱动驱动轮运转,履带滚动,带动机器人到达指定工作区域,机器人在移动过程中,控制组件控制激光雷达工作,对机器人前方环境扫描搜索并构建区域地图,确定自身处于地图中的位置,同时,机器人还将记忆自身的移动路线;当遇到障碍物时,机器人停止前移并配合建模的地图进行避让,并在地图中进行标记,为返程或其它机器人进入现场提供指导。
2)机器人灭火:侦察模块对机器人周围现场环境图像、视频侦察,当检测到火源位置时,控制组件控制回转云台进行角度调整,启动泵送组件,为灭火炮提供灭火介质实现灭火。
3)机器人救援:侦察模块对机器人周围现场环境图像、视频侦察,当检测到待救援或移动的人或物时,控制组件控制重载回转电机运转,带动作业机械爪进行角度调整,进一步控制作业机械爪对待救援或移动的人或物进行抓取移动至安全位置。
(2)高空系泊无人机系统释放及侦察步骤:
1)高空系泊无人机系统的释放:
a、控制组件控制同步推进支杆沿滑台系统向后移动,同步推进支杆顶部的导向释放帽通过导向分离头带动高空系泊无人机系统向后移动,远离固定支架的同步推进支杆移动至滑台系统的后端受限位挡块作用停止移动,靠近固定支架的一组同步推进支杆继续向后移动,带动高空系泊无人机系统继续向后滑动,高空系泊无人机系统受重力作用影响后端有下降趋势,导向分离头限位在导向释放帽内能防止高空系泊无人机系统跌落,控制台控制无人机的动力组件运行,螺旋桨运转,锥形的导向分离头能从锥形的导向释放帽脱出,从而带动高空系泊无人机系统从无人机储存释放装置上起飞。
b、控制组件控制同步推进支杆沿滑台系统向后移动,同步推进支杆顶部的导向释放帽通过导向分离头带动高空系泊无人机系统向后移动,远离固定支架的同步推进支杆移动至滑台系统的后端受限位挡块作用停止移动,此时控制台控制位移电机转动,位移电机带动同步带转动进而带动同步滑块前后移动,由于同步滑块依次与基座、无人机、载荷起落架连接,载荷起落架又与无人机储存释放装置的同步推进支杆连接,因此实现滑台本体相对于无人机向前移动,滑台本体移动至释放顶座处时,无人机沿滑台本体向后运动,控制台控制无人机的动力组件运行,螺旋桨运转,锥形的导向分离头能从锥形的导向释放帽脱出,从而带动高空系泊无人机系统从无人机储存释放装置上起飞。
2)高空系泊无人机系统的高空侦察:
a、高空系泊无人机系统在高空飞行过程中,高空侦察组件一对飞行环境及目标物进行侦察,控制台控制回转电机转动,带动驱动齿轮转动,进而带动环形齿轮及依次连接的机架转动,实现无人机的转向。
b、当高空系泊无人机系统飞行靠近待侦察物壁面时,根据待侦察物壁面的材质选择真空吸附或电磁吸附,阵列测距模组实时监测吸盘与待侦察物壁面之间的距离,控制台控制气泵运行,吸盘吸附于待侦察物壁面上,控制台还控制摆向电机转动,带动第二铰链及真空吸附模组左右摆向转动,实现吸盘与待侦察物壁面之间吸附角度的主动调整,相邻吸盘之间的导向支撑弹簧能够实现吸盘与待侦察物壁面之间吸附角度的被动辅助调整,最终实现高空系泊无人机系统对待侦察物壁面的稳固贴合附着,以利于高空侦察组件二对待侦察物壁面内部进行稳定侦察。
c、当待侦察物壁面为导磁性壁面时,阵列电磁吸附单元吸附于待侦察物壁面上,柔性垫防止高空系泊无人机系统受损,柔性筋能够实现阵列电磁吸附单元随待侦察物壁面的独立调节,实现高空系泊无人机系统对待侦察物壁面的稳固贴合附着,以利于高空侦察组件二对待侦察物壁面内部进行稳定侦察。
本发明具有以下有益效果:本发明的陆空两栖高层建筑系泊侦察灭火机器人通过无人机储存释放装置实现机器人对高空系泊无人机系统的稳定自动释放,高空系泊无人机系统能够吸附于待侦察物壁面对待侦察物内部进行抵近侦察,且能根据待侦察物壁面的材质选择真空吸附或电磁吸附;另外,采用重载回转底座实现重载救援作业系统的高负载稳定性支撑,提高机器人的救援能力;利用电控能源模块、侦察模块、灭火系统完成陆空全自主智能侦察和灭火,提高了现场对灾害的处理效率和智能化程度,且不需要人工近距离操控,提高消防灭火的安全性。
附图说明
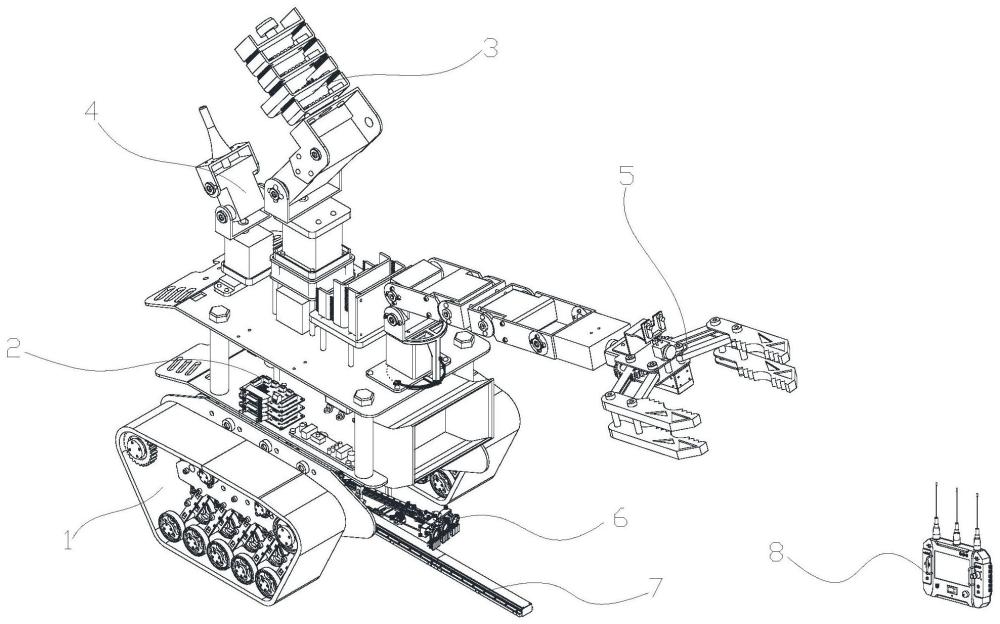
图1是本发明陆空两栖高层建筑系泊侦察灭火机器人及控制台的整体立体结构示意图。
图2是本发明陆空两栖高层建筑系泊侦察灭火机器人的主视图。
图3是图2中A处局部结构放大图。
图4是本发明导轨模组的内部结构仰视图。
图5是图4中B处局部结构放大图。
图6是本发明陆空两栖高层建筑系泊侦察灭火机器人的后视图。
图7是本发明高空系泊无人机系统的整体结构立体示意图。
图8是图7中C处局部结构放大图。
图9是本发明高空系泊无人机系统的主视图。
图10是图9中G-G向剖视图。
图11本发明高空系泊无人机系统的后视图。
图12是图11中D处局部结构放大图。
图13是图11中E处局部结构放大图。
图14本发明高空系泊无人机系统的右视图。
图15是本发明无人机储存释放装置的结构示意图。
图16是本发明高空系泊无人机系统由无人机储存释放装置滑出后的示意图。
图17是图16中F处局部结构放大图。
图18是本发明高空系泊无人机系统从无人机储存释放装置继续向前滑动后的示意图。
图19是本发明高空系泊无人机系统从无人机储存释放装置释放起飞后的示意图。
图20是本发明陆空两栖高层建筑系泊侦察灭火机器人使用效果示意图。
图中,1、移动平台,2、电控能源模块,3、侦察模块,4、灭火系统,5、重载救援作业系统,6、高空系泊无人机系统,7、无人机储存释放装置,8、控制台,9、待侦察物壁面,1-1、履带,1-2、驱动轮,1-3、承重轮,1-4、悬挂组件,1-5、导向从动轮,1-6、立柱,1-7、主体,1-8、承载基板,1-9、载荷板,2-1、激光雷达,2-2、控制组件,2-3、驱动组件,2-4、能源组件,2-5、无线通讯组件,3-1、前置侦察组件,3-2、全向侦察探测组件,3-3、高空侦察组件一,3-4、高空侦察组件二,3-5、救援侦察组件,3-2-1、探测传感模组,3-2-2、第一全向云台,3-2-3、探测组件底座,3-3-1、侦察模组,3-3-2、第二全向云台,3-5-1、激光测距组件,3-5-2、上视觉模块,3-5-3、下视觉模块,4-1、灭火炮,4-2、回转云台,4-3、灭火炮底座,4-4、介质箱,4-5、泵送组件,5-1、作业机械爪,5-2、多自由度机械臂,5-3、重载回转底座,5-3-1、上支撑架,5-3-2、支撑立柱,5-3-3、回转支撑环,5-3-4、回转支撑本体,5-3-5、支撑筋,5-3-6、固定基座,5-3-7、固定套,5-3-8、导轨模组,5-3-9、重载回转电机,5-3-8a、滚珠,5-3-8b、第一弹性元件,5-3-8c、第二弹性元件,5-3-8d、导向孔,5-3-8e、锁紧螺栓,5-3-8f、导向槽,6-1、无人机,6-2、载荷起落架,6-3、回转探测组件,6-4、自适应壁面系泊组件,6-1-1、机架,6-1-2、动力组件,6-1-3、螺旋桨,6-1-4、电控能源组件,6-2-1、第一支撑杆,6-2-2、连接挂件,6-2-3、起降支撑杆,6-2-2a、第一横向挂板,6-2-2b、第二纵向连接板,6-2-2c、第三垂向挂板,6-2-3a、支撑杆主体,6-2-3b、导向分离头,6-3-1、转台,6-3-2、环形齿轮,6-3-3、驱动齿轮,6-3-4、基座,6-3-5、回转电机,6-3-6、滑台本体,6-3-7、同步带,6-3-8、同步滑块,6-3-9、位移检测模块,6-3-10、位移电机,6-4-1、主动摆向角调节组件,6-4-2、系泊主体,6-4-3、真空吸附模组,6-4-4、电磁吸附模组,6-4-1a、第一铰链,6-4-1b、第二铰链,6-4-1c、铰轴,6-4-1d、摆向电机,6-4-1e、弹性支撑座,6-4-1f、弹簧,6-4-1g、导向凸台,6-4-3a、吸盘,6-4-3b、主体框架,6-4-3c、导流装置,6-4-3d、导向支撑弹簧,6-4-3e、阵列测距模组,6-4-3f、导向弹簧固定座,6-4-3g、气路管道,6-4-3h、管道支撑座,6-4-3i、气泵,6-4-3j、固定座,6-4-3k、摆动轴,6-4-3l、摆动轴承,6-4-4a、阵列电磁吸附单元,6-4-4b、柔性垫,6-4-4c、同步支架,6-4-4d、电磁吸附基座,6-4-4e、柔性筋,7-1、固定支架,7-2、滑台系统,7-3、同步推进支杆,7-4、滑移导向块,7-5、导向释放帽,7-6、释放顶座。
具体实施方式
以下是本发明的具体实施例,对本发明的技术方案做进一步描述,但是本发明的保护范围并不限于这些实施例。凡是不背离本发明构思的改变或等同替代均包括在本发明的保护范围之内。
如图1所示,一种陆空两栖高层建筑系泊侦察灭火机器人,包括:
移动平台1,用于承载安装机器人的各部件并带动机器人移动;
安装于移动平台1上的电控能源模块2,用于为机器人的各部件提供能源并驱动控制各部件运行;
安装于移动平台1上的侦察模块3,用于对机器人前方、后方、空中进行全方位侦察监测,侦察模块3与电控能源模块2电性连接;
灭火系统4,安装于移动平台1的前部,灭火系统4与电控能源模块2电性连接,灭火系统4用于机器人对火源进行灭火操作;
重载救援作业系统5,安装于移动平台1的后部,用于机器人额救援作业,重载救援作业系统5与电控能源模块2电性连接;
无人机储存释放装置7,安装于移动平台1的下部,无人机储存释放装置7与电控能源模块2电性连接;
设置于无人机储存释放装置7上的高空系泊无人机系统6,高空系泊无人机系统6能够从无人机储存释放装置7上释放起飞,实现高空侦察作业;
控制台8,与电控能源模块2及高空系泊无人机系统6无线连接,用于对机器人及高空系泊无人机系统6进行远程控制。
如图2所示,移动平台1包括履带模组、立柱1-6、主体1-7、承载基板1-8、载荷板1-9,主体1-7的顶部安装有承载基板1-8,承载基板1-8的上表面固定连接有若干立柱1-6,立柱1-6的顶部固定连接有载荷板1-9,承载基板1-8和载荷板1-9用于安装电控能源模块2,灭火系统4安装于载荷板1-9上表面的前部,重载救援作业系统5安装于载荷板1-9上表面的后部,无人机储存释放装置7固定连接于承载基板1-8的底部,履带模组设有两组,对称安装于主体1-7的两侧,每组履带模组至少包括履带1-1、驱动轮1-2、承重轮1-3、悬挂组件1-4、导向从动轮1-5,悬挂组件1-4的下方连接有若干承重轮1-3,履带1-1设置并包络于驱动轮1-2、承重轮1-3、导向从动轮1-5的外侧,驱动轮1-2与电控能源模块2中的驱动组件2-3连接并由驱动组件2-3驱动旋转,带动履带1-1滚动,进而带动导向从动轮1-5旋转,实现与驱动轮1-2、承重轮1-3共同支撑履带1-1滚动运动。
电控能源模块2包括激光雷达2-1、控制组件2-2、驱动组件2-3、能源组件2-4、无线通讯组件2-5,激光雷达2-1、控制组件2-2、无线通讯组件2-5均设置于承载基板1-8上,驱动组件2-3和能源组件2-4设置于载荷板1-9上,激光雷达2-1、驱动组件2-3、能源组件2-4、无线通讯组件2-5均与控制组件2-2电性连接,激光雷达2-1用于实现对现场环境建模、运动避障和路径规划,控制组件2-2用于实现对机器人各部件的运动控制,驱动组件2-3用于驱动移动平台1前进、后退和转向,能源组件2-4用于为机器人各部件提供能源,无线通讯组件2-5用于与控制台8实现无线通讯连接。
如图2、图7所示,侦察模块3包括前置侦察组件3-1、全向侦察探测组件3-2、高空侦察组件一3-3、高空侦察组件二3-4、救援侦察组件3-5,前置侦察组件3-1、全向侦察探测组件3-2、高空侦察组件一3-3、高空侦察组件二3-4、救援侦察组件3-5均与控制台8无线连接,前置侦察组件3-1设置于移动平台1的承载基板1-8的前侧,全向侦察探测组件3-2包括探测传感模组3-2-1、第一全向云台3-2-2、探测组件底座3-2-3,探测组件底座3-2-3固定安装于移动平台1载荷板1-9上,探测传感模组3-2-1通过第一全向云台3-2-2连接于探测组件底座3-2-3上,探测传感模组3-2-1包括但不限于摄像机、红外、激光测距等模块;高空侦察组件一3-3包括侦察模组3-3-1和第二全向云台3-3-2,侦察模组3-3-1通过第二全向云台3-3-2安装于高空系泊无人机系统6无人机6-1的顶部,用于无人机6-1飞行过程中对周围环境及目标的侦察;救援侦察组件3-5包括激光测距组件3-5-1、上视觉模块3-5-2、下视觉模块3-5-3,激光测距组件3-5-1和上视觉模块3-5-2固定安装于重载救援作业系统5前端的上侧,下视觉模块3-5-3固定安装于重载救援作业系统5前端的下侧,用于对待救援的人或物进行测距、侦察。
如图2、图6所示,灭火系统4包括灭火炮4-1、回转云台4-2、灭火炮底座4-3、介质箱4-4、泵送组件4-5,灭火炮底座4-3固定安装于移动平台1载荷板1-9的前部,灭火炮4-1通过回转云台4-2安装于灭火炮底座4-3上,介质箱4-4和泵送组件4-5安装于移动平台1的承载基板1-8上,灭火炮4-1通过管路与泵送组件4-5连接,泵送组件4-5与介质箱4-4连接,介质箱4-4用于盛放灭火介质,包括但不限于水、干粉或泡沫灭火剂;回转云台4-2、泵送组件4-5与电控能源模块2中的控制组件2-2电性连接。
如图6所示,重载救援作业系统5包括作业机械爪5-1、多自由度机械臂5-2、重载回转底座5-3,重载回转底座5-3安装固定于移动平台1的载荷板1-9的后部,多自由度机械臂5-2的一端连接于重载回转底座5-3上,多自由度机械臂5-2的另一端与作业机械爪5-1连接,救援侦察组件3-5安装于作业机械爪5-1上,作业机械爪5-1与电控能源模块2的控制组件2-2电性连接。承载基板1-8的后端还可以设置储物箱,用于存放救援工具或被救援物。
如图3、图4所示,重载回转底座5-3用于提高重载救援作业系统5的载荷支撑能力,重载回转底座5-3包括上支撑架5-3-1、支撑立柱5-3-2、回转支撑环5-3-3、回转支撑本体5-3-4、支撑筋5-3-5、固定基座5-3-6、固定套5-3-7、导轨模组5-3-8、重载回转电机5-3-9,作业机械爪5-1、重载回转电机5-3-9与电控能源模块2中的控制组件2-2电性连接,固定基座5-3-6固定安装于载荷板1-9的上表面,固定基座5-3-6的一侧固定连接有回转支撑本体5-3-4,回转支撑本体5-3-4的正上方设有回转支撑环5-3-3,回转支撑环5-3-3与回转支撑本体5-3-4之间通过若干支撑筋5-3-5连接固定,回转支撑环5-3-3的两端分别通过固定套5-3-7固定安装于固定基座5-3-6的上表面,重载回转电机5-3-9的底部固定安装于固定基座5-3-6的上表面,上支撑架5-3-1设置于重载回转电机5-3-9的顶部,重载回转电机5-3-9的输出轴与上支撑架5-3-1连接,上支撑架5-3-1的上表面与多自由度机械臂5-2的底部连接固定,上支撑架5-3-1的外侧底部与支撑立柱5-3-2的上端连接固定,支撑立柱5-3-2的下端设有导轨模组5-3-8,支撑立柱5-3-2通过导轨模组5-3-8与回转支撑环5-3-3滑动连接,重载回转电机5-3-9运转,能够带动上支撑架5-3-1及多自由度机械臂5-2沿回转支撑环5-3-3转动。
如图3、5、17所示,导轨模组5-3-8包括滚珠5-3-8a、第一弹性元件5-3-8b、第二弹性元件5-3-8c、导向孔5-3-8d、锁紧螺栓5-3-8e、导向槽5-3-8f,导向槽5-3-8f设置于支撑立柱5-3-2的底部,导向槽5-3-8f用于卡接于回转支撑环5-3-3的上部,且导向槽5-3-8f与回转支撑环5-3-3相适应,导向槽5-3-8f的两侧分别开设有导向孔5-3-8d,导向孔5-3-8d内设有锁紧螺栓5-3-8e,锁紧螺栓5-3-8e上套设有第二弹性元件5-3-8c,第二弹性元件5-3-8c外侧套设有第一弹性元件5-3-8b,锁紧螺栓5-3-8e的内端设有滚珠5-3-8a,滚珠5-3-8a一端与回转支撑环5-3-3接触,回转支撑环5-3-3上设有与滚珠5-3-8a相适应的凹槽,另一端与第一弹性元件5-3-8b和第二弹性元件5-3-8c接触。第一弹性元件5-3-8b为软弹簧,第二弹性元件5-3-8c为硬弹簧,通过第一弹性元件5-3-8b和第二弹性元件5-3-8c实现滚珠5-3-8a对回转支撑环5-3-3的压紧接触滑动。
如图7所示,高空系泊无人机系统6包括无人机6-1、载荷起落架6-2、回转探测组件6-3、自适应壁面系泊组件6-4,载荷起落架6-2与无人机储存释放装置7连接,无人机6-1与载荷起落架6-2连接固定,无人机6-1的底部连接有回转探测组件6-3,自适应壁面系泊组件6-4连接于回转探测组件6-3的后端;无人机6-1、回转探测组件6-3、自适应壁面系泊组件6-4均与控制台8无线连接。
无人机6-1包括机架6-1-1、动力组件6-1-2、螺旋桨6-1-3、电控能源组件6-1-4,电控能源组件6-1-4设置于机架6-1-1的中心内部,机架6-1-1的外端固定连接有动力组件6-1-2,螺旋桨6-1-3与动力组件6-1-2连接并由动力组件6-1-2驱动运转,动力组件6-1-2与控制台8无线连接,高空侦察组件一3-3设置于机架6-1-1的中心顶部。
载荷起落架6-2包括第一支撑杆6-2-1、连接挂件6-2-2、起降支撑杆6-2-3,起降支撑杆6-2-3设有两根,对称设置于无人机6-1两侧下方,起降支撑杆6-2-3用于与无人机储存释放装置7的滑移导向块7-4支撑接触,且起降支撑杆6-2-3能够在滑移导向块7-4上滑动,起降支撑杆6-2-3通过连接挂件6-2-2与第一支撑杆6-2-1的一端连接,第一支撑杆6-2-1的另一端固定连接于无人机6-1机架6-1-1的侧壁上。
连接挂件6-2-2包括第一横向挂板6-2-2a、第二纵向连接板6-2-2b、第三垂向挂板6-2-2c,起降支撑杆6-2-3包括支撑杆主体6-2-3a、导向分离头6-2-3b,第一横向挂板6-2-2a固定连接于第一支撑杆6-2-1的端部,第一横向挂板6-2-2a的两端分别通过第二纵向连接板6-2-2b与第三垂向挂板6-2-2c的顶部连接,第三垂向挂板6-2-2c的底部固定连接于支撑杆主体6-2-3a上,支撑杆主体6-2-3a的前端设有导向分离头6-2-3b,导向分离头6-2-3b与无人机储存释放装置7的导向释放帽7-5形状相适应且相互配合。
如图10、11、13所示,回转探测组件6-3包括转台6-3-1、环形齿轮6-3-2、驱动齿轮6-3-3、基座6-3-4、回转电机6-3-5、滑台本体6-3-6、同步带6-3-7、同步滑块6-3-8、位移检测模块6-3-9、位移电机6-3-10,回转电机6-3-5、位移电机6-3-10分别与控制台8无线连接,位移检测模块6-3-9固定安装于滑台本体6-3-6的一端,位移电机6-3-10固定于滑台本体6-3-6的另一端,位移电机6-3-10的输出轴与同步带6-3-7连接,同步带6-3-7套设于滑台本体6-3-6的外侧,同步滑块6-3-8固定连接于同步带6-3-7上并能沿滑台本体6-3-6滑动,位移电机6-3-10带动同步带6-3-7转动进而带动同步滑块6-3-8前后移动,同步滑块6-3-8的顶部与基座6-3-4的底部固定连接,基座6-3-4的底部还固定连接有回转电机6-3-5,基座6-3-4的上表面设有相互啮合连接的环形齿轮6-3-2和驱动齿轮6-3-3,回转电机6-3-5的输出轴穿过基座6-3-4后与驱动齿轮6-3-3连接,环形齿轮6-3-2与转台6-3-1的底部固定连接,转台6-3-1的顶部固定连接于无人机6-1的机架6-1-1的底部,回转电机6-3-5转动,带动驱动齿轮6-3-3转动,进而带动环形齿轮6-3-2及依次连接的机架6-1-1转动,实现无人机6-1的转向。
如图8所示,自适应壁面系泊组件6-4包括主动摆向角调节组件6-4-1、系泊主体6-4-2、真空吸附模组6-4-3、电磁吸附模组6-4-4,真空吸附模组固定安装于系泊主体6-4-2的一端,电磁吸附模组6-4-4固定连接于真空吸附模组6-4-3的下方,系泊主体6-4-2的另一端与主动摆向角调节组件6-4-1的一端连接,主动摆向角调节组件6-4-1的另一端固定连接于滑台本体6-3-6上安装位移检测模块6-3-9的一端,主动摆向角调节组件6-4-1与控制台8无线连接。
如图12所示,主动摆向角调节组件6-4-1包括第一铰链6-4-1a、第二铰链6-4-1b、铰轴6-4-1c、摆向电机6-4-1d、弹性支撑座6-4-1e、弹簧6-4-1f、导向凸台6-4-1g,第一铰链6-4-1a固定连接于滑台本体6-3-6的端部,第二铰链6-4-1b固定连接于系泊主体6-4-2上,第一铰链6-4-1a与第二铰链6-4-1b通过铰轴6-4-1c铰接连接,摆向电机6-4-1d固定安装于第二铰链6-4-1b的底部,摆向电机6-4-1d与控制台8无线连接,摆向电机6-4-1d的输出轴与第二铰链6-4-1b连接,摆向电机6-4-1d转动带动第二铰链6-4-1b及系泊主体6-4-2绕铰轴6-4-1c摆向转动,第一铰链6-4-1a两侧的滑台本体6-3-6上分别对称固定安装有弹性支撑座6-4-1e,第二铰链6-4-1b两侧的系泊主体6-4-2上分别对称固定安装有导向凸台6-4-1g,弹性支撑座6-4-1e与对应的导向凸台6-4-1g之间通过弹簧6-4-1f连接,通过弹簧6-4-1f实现系泊主体6-4-2与滑台本体6-3-6之间的软支撑。
如图8-10所示,真空吸附模组6-4-3包括吸盘6-4-3a、主体框架6-4-3b、导流装置6-4-3c、导向支撑弹簧6-4-3d、阵列测距模组6-4-3e、导向弹簧固定座6-4-3f、气路管道6-4-3g、管道支撑座6-4-3h、气泵6-4-3i、固定座6-4-3j、摆动轴6-4-3k、摆动轴承6-4-3l,吸盘6-4-3a设有多个,每个吸盘6-4-3a的前端设有若干阵列测距模组6-4-3e,每个吸盘6-4-3a的顶部设有导流装置6-4-3c,导流装置6-4-3c通过气路管道6-4-3g与气泵6-4-3i连接,气泵6-4-3i安装于基座6-3-4上,气泵6-4-3i与控制台8无线连接,管道支撑座6-4-3h固定安装于滑台本体6-3-6的底部,管道支撑座6-4-3h用于支撑固定气路管道6-4-3g,主体框架6-4-3b与系泊主体6-4-2连接固定,每个吸盘6-4-3a的后端通过摆动轴6-4-3k与摆动轴承6-4-3l连接于主体框架6-4-3b的顶部和底部,吸盘6-4-3a能够绕摆动轴6-4-3k左右摆动,每个吸盘6-4-3a的两侧分别固定安装有导向弹簧固定座6-4-3f,相邻的两个吸盘6-4-3a的导向弹簧固定座6-4-3f之间通过导向支撑弹簧6-4-3d连接,最外侧的吸盘6-4-3a通过导向支撑弹簧6-4-3d与主体框架6-4-3b的侧壁连接。吸盘6-4-3a用于将高空系泊无人机系统6吸附于待侦察物壁面9上,待侦察物壁面9可以为高层建筑物玻璃、化工油罐、磁性结构物的表面。
如图8、14所示,电磁吸附模组6-4-4包括阵列电磁吸附单元6-4-4a、柔性垫6-4-4b、同步支架6-4-4c、电磁吸附基座6-4-4d、柔性筋6-4-4e,阵列电磁吸附单元6-4-4a、电磁吸附基座6-4-4d与吸盘6-4-3a数量一致且一一对应,每个阵列电磁吸附单元6-4-4a的端面上均设有柔性垫6-4-4b,每个阵列电磁吸附单元6-4-4a的后部分别固定连接于对应的电磁吸附基座6-4-4d上,电磁吸附基座6-4-4d通过同步支架6-4-4c固定连接于对应的吸盘6-4-3a的底部,相邻的电磁吸附基座6-4-4d之间通过柔性筋6-4-4e连接。电磁吸附基座6-4-4d用于将高空系泊无人机系统6磁力吸附于待侦察物壁面9上。
如图15所示,无人机储存释放装置7包括固定支架7-1、滑台系统7-2、同步推进支杆7-3、滑移导向块7-4、导向释放帽7-5、释放顶座7-6,固定支架7-1固定安装于移动平台1承载基板1-8的底部,滑台系统7-2的前端固定安装于固定支架7-1的底部,滑台系统7-2与机器人前进方向平行,且滑台系统7-2的后端延伸至移动平台1的后方外侧,滑台系统7-2的后端设有限位挡块,同步推进支杆7-3设有偶数个,两个为一组,每组同步推进支杆7-3沿滑台系统7-2前后设置,且每组的两个同步推进支杆7-3分别对称设置于滑台系统7-2的两侧,每组的两个同步推进支杆7-3能够沿滑台系统7-2移动,本发明的一个实施例中,同步推进支杆7-3设有四个,靠近固定支架7-1的一组同步推进支杆7-3与电控能源模块2中的控制组件2-2电气连接,同步推进支杆7-3的顶部均设有滑移导向块7-4,滑移导向块7-4用于支撑固定高空系泊无人机系统6,靠近固定支架7-1的一组同步推进支杆7-3之间连接有释放顶座7-6,靠近固定支架7-1的一组同步推进支杆7-3顶部的滑移导向块7-4上固定连接有导向释放帽7-5,导向释放帽7-5为锥形,开口朝向远离固定支架7-1的方向,导向释放帽7-5与高空系泊无人机系统6的载荷起落架6-2相配合,实现高空系泊无人机系统6储存、推进及释放。
陆空两栖高层建筑系泊侦察灭火机器人的工作方法,包括以下步骤:
(1)机器人运动、灭火、救援步骤:
1)机器人移动:控制台8控制电控能源模块2中的驱动组件2-3驱动驱动轮1-2运转,履带1-1滚动,带动机器人到达指定工作区域,机器人在移动过程中,控制组件2-2控制激光雷达工作,对机器人前方环境扫描搜索并构建区域地图,确定自身处于地图中的位置,同时,机器人还将记忆自身的移动路线;当遇到障碍物时,机器人停止前移并配合建模的地图进行避让,并在地图中进行标记,为返程或其它机器人进入现场提供指导。
2)机器人灭火:侦察模块3对机器人周围现场环境图像、视频侦察,当检测到火源位置时,控制组件2-2控制回转云台4-2进行角度调整,启动泵送组件4-5,为灭火炮4-1提供灭火介质实现灭火。
3)机器人救援:侦察模块3对机器人周围现场环境图像、视频侦察,当检测到待救援或移动的人或物时,控制组件2-2控制重载回转电机5-3-9运转,带动作业机械爪5-1进行角度调整,进一步控制作业机械爪5-1对待救援或移动的人或物进行抓取移动至安全位置。
(2)高空系泊无人机系统6释放及侦察步骤:
1)高空系泊无人机系统6的释放:
a、控制组件2-2控制同步推进支杆7-3沿滑台系统7-2向后移动,同步推进支杆7-3顶部的导向释放帽7-5通过导向分离头6-2-3b带动高空系泊无人机系统6向后移动,远离固定支架7-1的同步推进支杆7-3移动至滑台系统7-2的后端受限位挡块作用停止移动(如图16所示),靠近固定支架7-1的一组同步推进支杆7-3继续向后移动(如图18所示),带动高空系泊无人机系统6继续向后滑动,高空系泊无人机系统6受重力作用影响后端有下降趋势,导向分离头6-2-3b限位在导向释放帽7-5内能防止高空系泊无人机系统6跌落,控制台8控制无人机6-1的动力组件6-1-2运行,螺旋桨6-1-3运转,锥形的导向分离头6-2-3b能从锥形的导向释放帽7-5脱出,从而带动高空系泊无人机系统6从无人机储存释放装置7上起飞(如图19所示)。
b、控制组件2-2控制同步推进支杆7-3沿滑台系统7-2向后移动,同步推进支杆7-3顶部的导向释放帽7-5通过导向分离头6-2-3b带动高空系泊无人机系统6向后移动,远离固定支架7-1的同步推进支杆7-3移动至滑台系统7-2的后端受限位挡块作用停止移动,此时控制台8控制位移电机6-3-10转动,位移电机6-3-10带动同步带6-3-7转动进而带动同步滑块6-3-8前后移动,由于同步滑块6-3-8依次与基座6-3-4、无人机6-1、载荷起落架6-2连接,载荷起落架6-2又与无人机储存释放装置7的同步推进支杆7-3连接,因此实现滑台本体6-3-6相对于无人机6-1向前移动,滑台本体6-3-6移动至释放顶座7-6处时,无人机6-1沿滑台本体6-3-6向后运动,控制台8控制无人机6-1的动力组件6-1-2运行,螺旋桨6-1-3运转,锥形的导向分离头6-2-3b能从锥形的导向释放帽7-5脱出,从而带动高空系泊无人机系统6从无人机储存释放装置7上起飞。
2)高空系泊无人机系统6的高空侦察:
a、高空系泊无人机系统6在高空飞行过程中,高空侦察组件一3-3对飞行环境及目标物进行侦察,控制台8控制回转电机6-3-5转动,带动驱动齿轮6-3-3转动,进而带动环形齿轮6-3-2及依次连接的机架6-1-1转动,实现无人机6-1的转向。
b、当高空系泊无人机系统6飞行靠近待侦察物壁面9时,根据待侦察物壁面9的材质选择真空吸附或电磁吸附,阵列测距模组6-4-3e实时监测吸盘6-4-3a与待侦察物壁面9之间的距离,控制台8控制气泵6-4-3i运行,吸盘6-4-3a吸附于待侦察物壁面9上,控制台8还控制摆向电机6-4-1d转动,带动第二铰链6-4-1b及真空吸附模组6-4-3左右摆向转动,实现吸盘6-4-3a与待侦察物壁面9之间吸附角度的主动调整,相邻吸盘6-4-3a之间的导向支撑弹簧6-4-3d能够实现吸盘6-4-3a与待侦察物壁面9之间吸附角度的被动辅助调整,最终实现高空系泊无人机系统6对待侦察物壁面9的稳固贴合附着,以利于高空侦察组件二3-4对待侦察物壁面9内部进行稳定侦察(如图20所示)。
c、当待侦察物壁面9为导磁性壁面时,阵列电磁吸附单元6-4-4a吸附于待侦察物壁面9上,柔性垫6-4-4b防止高空系泊无人机系统6受损,柔性筋6-4-4e能够实现阵列电磁吸附单元6-4-4a随待侦察物壁面9的独立调节,实现高空系泊无人机系统6对待侦察物壁面9的稳固贴合附着,以利于高空侦察组件二3-4对待侦察物壁面9内部进行稳定侦察。
本发明不局限于上述实施方式,任何人应得知在本发明的启示下作出的结构变化,凡是与本发明具有相同或相近的技术方案,均落入本发明的保护范围之内。
本发明未详细描述的技术、形状、构造部分均为公知技术。