一种具有自动瞄准灭火功能的挂轨式煤矿巡检机器人
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及矿井机器人技术领域,具体涉及一种具有自动瞄准灭火功能的煤矿巡检机器人。
背景技术
近年来,煤矿巡检机器人已经大量应用在煤矿井下对设备和环境进行巡检工作,尤其是可以携带热像仪对易发生火灾的设备进行温度采集和超温报警,能够有效地降低煤矿火灾事故发生,起到很好的预防作用。
然而,当前的煤矿巡检机器人存在两个问题:(1)机器人只能发现火灾隐患,而不能第一时间进行处置;(2)挂轨式类机器人的转弯半径较大,不适合小转弯半径巡检;
因此,如何使机器人不仅能第一时间发现火灾隐患还能及时进行处置,且能够在狭小空间小转弯半径下进行巡检工作,对于进一步提升煤矿巡检机器人的实用价值具有重要意义。
发明内容
本发明针对当前挂轨式煤矿巡检机器人转弯半径大,且不具备火灾隐患处置功能的技术问题,提供一种具有小转弯半径且能够具有自动瞄准灭火功能的挂轨式煤矿巡检机器人。
本发明通过以下技术方案实现:一种具有自动瞄准灭火功能的煤矿巡检机器人,包括滑动安装在工字钢轨道上的隔爆兼本质安全型机器人本体;
所述隔爆兼本质安全型机器人本体后侧连接有拖拽消防水炮,拖拽消防水炮滑动安装在工字钢轨道上;
所述隔爆兼本质安全型机器人本体包括动力箱,动力箱滑动安装在工字钢轨道上;隔爆兼本质安全型机器人本体前侧设置有热像仪与可见光双光谱云台和声光报警器;所述热像仪与可见光双光谱云台用于测量所需要巡检的设备的温度并实时采集图像信息,当设备温度超过预设温度时,声光报警器进行报警,拖拽消防水炮进行灭火;
所述动力箱包括隔爆箱体、驱动轮装置和两个导向轮装置;所述驱动轮装置上端与工字钢轨道滚动连接,驱动轮装置下端与隔爆箱体滑动连接,驱动轮装置与隔爆箱体的滑动方向与工字钢轨道垂直;两个所述导向轮装置分置在驱动轮装置前、后侧,导向轮装置上端与工字钢轨道滚动连接,导向轮装置下端与隔爆箱体回转连接。
其进一步是:所述隔爆兼本质安全型机器人本体前侧还设置有人脸识别摄像头、红外避障传感器和行程开关;所述人脸识别摄像头用于识别非授权人员进入巡检区域,当发现未授权人员时,声光报警器进行报警。
所述隔爆箱体包括设备腔和两个接线腔,两个所述接线腔分置在设备腔的前、后侧;所述接线腔连接有线缆引入装置;线缆从线缆引入装置进入接线腔,再从接线腔进入设备腔与设备腔中的部件连接。
所述驱动轮装置包括支撑架和安装在支撑架上的一对小型隔爆电机,小型隔爆电机上端的输出轴连接有驱动轮;所述小型隔爆电机一侧通过转轴与支撑架铰接,小型隔爆电机另一侧通过压紧弹簧和压紧螺母与支撑架连接,在压紧弹簧的弹力作用下,两个所述驱动轮压紧在工字钢轨道的两侧;
所述支撑架下侧固定有滑块,滑块滑动连接有导轨,导轨固定在隔爆箱体上侧。
所述导向轮装置包括一对导向轮支架,两个导向轮支架下端固定连接有底座安装板;所述导向轮支架内侧回转安装有吊轮和两个导向轮,两个所述导向轮分置在吊轮的前、后侧;所述吊轮滚动安装在工字钢轨道上,导向轮压在工字钢轨道侧面;
所述底座安装板上开设有安装通孔;
所述隔爆箱体上固定有螺栓固定底座,螺栓固定底座上通过螺栓头压盖固定连接有外六角螺栓;所述外六角螺栓从底座安装板的下侧传入底座安装板的安装通孔中;外六角螺栓上安装有压在底座安装板上侧的推力轴承,外六角螺栓上还安装有用于对推力轴承限位的螺母。
所述拖拽消防水炮包括拖拽壳体,拖拽壳体连接在隔爆兼本质安全型机器人本体后侧,拖拽壳体上固定有与工字钢轨道滚动连接的导向轮装置;
所述拖拽壳体下端安装有带火焰追踪功能的水炮头,拖拽壳体两侧通过灭火器固定箍安装有手提式水基灭火器;两个所述手提式水基灭火器通过三通管连接所述带火焰追踪功能的水炮头,三通管中安装有电磁阀。
与现有技术相比,本发明的有益效果是:通过设置热像仪与可见光双光谱云台和拖拽消防水炮能够第一时间发现并处置火情,手提式水基灭火器方便进行更换;隔爆兼本质安全型机器人本体设置驱动轮装置和导向轮装置,驱动轮装置采用滑动结构,导向轮装置采用回转结构,使得机器人具有较小的转弯半径,便于巡检。
附图说明
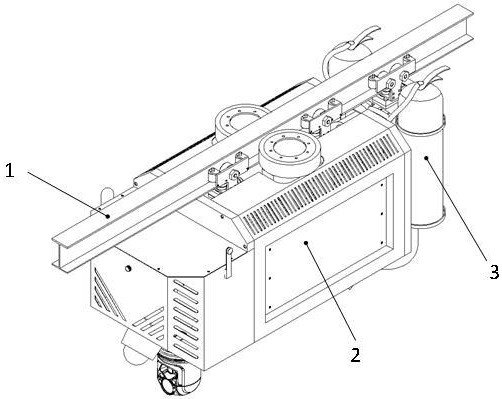
图1是本发明机器人整体的结构示意图;
图2是隔爆兼本质安全型机器人本体的结构示意图;
图3是动力箱轴的测视图;
图4是动力箱的主视图;
图5是驱动轮装置的结构示意图一;
图6是驱动轮装置的结构示意图二;
图7是导向轮装置的结构示意图;
图8是机器人在小转弯半径下导向轮装置和驱动轮装置的姿态示意图;
图9是拖拽消防水炮的测视图;
图10是拖拽消防水炮的主视图。
图中:1工字钢轨道,2隔爆兼本质安全型机器人本体,3拖拽消防水炮;
2-1动力箱,2-2声光报警器,2-3本安腔壳体,2-4红外避障传感器,2-5人脸识别摄像头,2-6热像仪与可见光双光谱云台,2-7行程开关,2-8隔爆壳体外罩;
2-1-1线缆引入装置,2-1-2导向轮装置,2-1-3驱动轮装置,2-1-4拖拽片Ⅰ,2-1-5接线腔盖板Ⅰ,2-1-6设备腔盖板,2-1-7接线腔盖板Ⅱ,2-1-8隔爆箱体,2-1-9螺栓固定底座,2-1-10螺栓头压盖,2-1-11螺母,2-1-12推力轴承,2-1-13外六角螺栓,2-1-14滑块,2-1-15导轨;
2-1-2-1导向轮,2-1-2-2吊轮,2-1-2-3导向轮支架,2-1-2-4底座安装板;
2-1-3-1驱动轮,2-1-3-2小型隔爆电机,2-1-3-3支撑架,2-1-3-4转轴,2-1-3-5压紧弹簧,2-1-3-6压紧螺母;
3-1带火焰追踪功能的水炮头,3-2拖拽壳体,3-3拖拽片Ⅱ,3-4手提式水基灭火器,3-5灭火器固定箍,2-1-2导向轮装置,3-6三通管,3-7电磁阀。
实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
结合图1所示,一种具有自动瞄准灭火功能的煤矿巡检机器人,包括滑动安装在工字钢轨道1上的隔爆兼本质安全型机器人本体2。隔爆兼本质安全型机器人本体2后侧连接拖拽消防水炮3,拖拽消防水炮3滑动安装在工字钢轨道1上。隔爆兼本质安全型机器人本体2在工字钢轨道1移动,并拖动后侧的拖拽消防水炮3,进行巡检。
结合图2所示,隔爆兼本质安全型机器人本体2包括动力箱2-1,动力箱2-1外侧设置有隔爆壳体外罩2-8。动力箱2-1滑动安装在工字钢轨道1上,对机器人提供动力。隔爆兼本质安全型机器人本体2前侧设置有本安腔壳体2-3。本安腔壳体2-3上安装有热像仪与可见光双光谱云台2-6、声光报警器2-2、人脸识别摄像头2-5、红外避障传感器2-4和行程开关2-7。热像仪与可见光双光谱云台2-6用于测量所需要巡检的设备的温度并实时采集图像信息,当设备温度超过预设温度时,声光报警器2-2进行报警,拖拽消防水炮3进行灭火。人脸识别摄像头2-5用于识别非授权人员进入巡检区域,当发现未授权人员时,声光报警器2-2进行报警。红外避障传感器2-4用于机器人前部出现障碍时,进行停机。
结合图3和图4所示,动力箱2-1包括隔爆箱体2-1-8、驱动轮装置2-1-3和两个导向轮装置2-1-2。驱动轮装置2-1-3上端与工字钢轨道1滚动连接,驱动轮装置2-1-3下端与隔爆箱体2-1-8滑动连接,驱动轮装置2-1-3与隔爆箱体2-1-8的滑动方向与工字钢轨道1垂直。两个导向轮装置2-1-2分置在驱动轮装置2-1-3前、后侧,导向轮装置2-1-2上端与工字钢轨道1滚动连接,导向轮装置2-1-2下端与隔爆箱体2-1-8回转连接。
为满足防爆要求,隔爆箱体2-1-8包括设备腔B和接线腔A、接线腔C,接线腔A、接线腔C分置在设备腔B的前、后侧。设备腔B和接线腔A、接线腔C外侧对应固定有接线腔盖板Ⅱ2-1-7、设备腔盖板2-1-6和接线腔盖板Ⅰ2-1-5。线缆引入装置2-1-1焊接在隔爆箱体2-1-8的接线腔外部,并于两个接线腔联通。本实施例中,声光报警器2-2、红外避障传感器2-4、人脸识别摄像头2-5、热像仪与可见光双光谱云台2-6和行程开关2-7的线缆分别从2-1-1线缆引入装置进入2-1-8隔爆箱体的接线腔中,然后再从接线腔进入设备腔,控制机器人运动所需要的各类电气设备均安装在设备腔中。
结合图3至图6所示,驱动轮装置2-1-3包括支撑架2-1-3-3和安装在支撑架2-1-3-3上的一对小型隔爆电机2-1-3-2,小型隔爆电机2-1-3-2上端的输出法兰盘上连接有驱动轮2-1-3-1。小型隔爆电机2-1-3-2一侧侧耳通过转轴2-1-3-4与支撑架2-1-3-3铰接,小型隔爆电机2-1-3-2可以绕转轴2-1-3-4转动。小型隔爆电机2-1-3-2另一侧侧耳通过压紧弹簧2-1-3-5和压紧螺母2-1-3-6与支撑架2-1-3-3连接。在两侧的压紧弹簧2-1-3-5的弹力作用下,两个驱动轮2-1-3-1压紧在工字钢轨道1的两侧,为机器人提供驱动力。支撑架2-1-3-3下侧通过螺栓固定有滑块2-1-14,滑块2-1-14滑动连接有导轨2-1-15,导轨2-1-15焊接在隔爆箱体2-1-8上侧。驱动轮装置2-1-3在滑块2-1-14的作用下可沿2-1-15导轨滑动。
结合图3、图4和图7所示,导向轮装置2-1-2包括一对导向轮支架2-1-2-3,两个导向轮支架2-1-2-3下端通过螺栓固定连接底座安装板2-1-2-4。导向轮支架2-1-2-3内侧回转安装有吊轮2-1-2-2和两个导向轮2-1-2-1。两个导向轮2-1-2-1分置在吊轮2-1-2-2的前、后侧。吊轮2-1-2-2滚动安装在工字钢轨道1上,导向轮2-1-2-1压在工字钢轨道1侧面。吊轮2-1-2-2提供支撑力,导向轮2-1-2-1引导运动方向。
底座安装板2-1-2-4上开设有安装通孔。爆箱体2-1-8上固定有螺栓固定底座2-1-9,螺栓固定底座2-1-9上通过螺栓头压盖2-1-10固定连接有外六角螺栓2-1-13。外六角螺栓2-1-13从底座安装板2-1-2-4的下侧传入底座安装板2-1-2-4的安装通孔中。外六角螺栓2-1-13上安装有压在底座安装板2-1-2-4上侧的推力轴承2-1-12,外六角螺栓2-1-13上还安装有用于对推力轴承2-1-12限位的螺母2-1-11。在推力轴承2-1-12的作用下,导向轮支架2-1-2-3和底座安装板2-1-2-4整体可以围绕外六角螺栓2-1-13转动。
结合图3、图9和图10所示,拖拽消防水炮3包括拖拽壳体3-2,拖拽壳体3-2前侧固定有拖拽片Ⅱ3-3,隔爆箱体2-1-8后侧连接有拖拽片Ⅰ2-1-4,拖拽片Ⅰ2-1-4和拖拽片Ⅱ3-3通过插销连接。拖拽壳体3-2上固定有与工字钢轨道1滚动连接的导向轮装置2-1-2。拖拽壳体3-2下端安装有带火焰追踪功能的水炮头3-1,拖拽壳体3-2两侧通过灭火器固定箍3-5安装有手提式水基灭火器3-4。两个手提式水基灭火器3-4通过三通管3-6连接带火焰追踪功能的水炮头3-1,三通管3-6中安装有电磁阀3-7。
工作原理:
本发明中隔爆兼本质安全型机器人本体设置驱动轮装置和导向轮装置,驱动轮装置采用滑动结构,导向轮装置采用回转结构,使得机器人具有较小的转弯半径,便于巡检,如图8所示;
在机器人巡检过程中,首先通过热像仪与可见光双光谱云台2-6进行火灾预警,一旦发生明火,机器人停止运动,带火焰追踪功能的水炮头3-1通过程序控制寻找火点,同时控制电磁阀3-7打开,将手提式水基灭火器中的消防液体通过带火焰追踪功能的水炮头3-1喷出,实现第一时间灭火。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。