一种智能感知芯片用检测装置及其检测方法
文献发布时间:2024-01-17 01:23:17
技术领域
本发明涉及芯片检测领域,更具体地说,它涉及一种智能感知芯片用检测装置及其检测方法。
背景技术
智能感知芯片在封装之后,需要对该芯片封装进行检测,检测内容多样,该芯片封装两侧具有多个引脚,需要检测芯片封装两侧引脚之间的距离是否满足设计要求,以及引脚高度是否保持一致,现在检测装置无法满足上述检测要求。
发明内容
本发明提供一种智能感知芯片用检测装置及其检测方法,解决相关技术中对芯片引脚进行检测的技术问题。
本发明提供了一种智能感知芯片用检测装置,包括架体,架体水平设置,架体的中间设置有输送带结构,输送带结构的上方设置有夹持装置,夹持装置夹持芯片,夹持装置上方设置有检测机构,检测机构包括套筒、A弹簧、检测杆体、检测件及A感应器,套筒和检测杆体立状设置,套筒和检测杆体的数量均为两组,每组套筒和检测杆体的数量为两个,检测杆体滑动插装在套筒的内部,A弹簧设置在套筒的内部,A弹簧和检测杆体固定连接,检测件设置在检测杆体一侧下部,A感应器插装在套筒内部,A感应器与A弹簧接触配合,套筒的上方设置有调距结构、升降结构和检测组件,调距结构用于调节两组套筒之前的距离,升降结构用于带动两组检测杆体同步升降,检测组件检测两组引脚长度方向的高度是否发生变化。
进一步,夹持装置包括底板、夹持板和伸缩组件,底板水平设置,底板安装在输送带结构上,夹持板的数量为两组,夹持板立状设置,夹持板滑动插装在底板上,伸缩组件带动两组夹持板沿底板的长度方向相互靠近或者远离。
进一步,伸缩组件包括滑槽和B弹簧,滑槽开设在底板上,滑槽与夹持板滑动连接,B弹簧水平设置在滑槽内部,且B弹簧与夹持板固定连接。
进一步,两组夹持板相靠近的一侧均粘连有橡胶垫。
进一步,调距结构包括螺纹杆和支撑块,螺纹杆的数量为两组,螺纹杆横向设置,螺纹杆和架体的长度方向平行,螺纹杆和套筒螺纹连接,支撑块和螺纹杆转动连接。
进一步,升降结构包括横梁、支撑架和驱动件,支撑架立状设置,支撑架的下方设置有移动组件,移动组件带动支撑架沿架体的长度方向往复移动,支撑架和横梁滑动连接,驱动件驱动横梁在支撑架上升降。
进一步,驱动件包括电动推杆,电动推杆固定安装在支撑架的上方,电动推杆立状设置,电动推杆的输出端贯穿支撑架并与横梁固定连接。
进一步,移动组件包括支撑板和动力件,支撑板固定安装在支撑架的下方,支撑板水平设置,支撑板和架体滑动连接,动力件水平设置,动力件和架体固定连接,动力件的输出端和支撑板固定连接。
进一步,检测组件包括双向液压缸、框架、C弹簧及B感应器,双向液压缸固定安装在横梁的上方,双向液压缸水平设置,双向液压缸的输出端和支撑块固定连接,框架滑动套设在检测杆体的外部,框架水平设置,C弹簧和B感应器均插装在框架的内部,且C弹簧和B感应器接触配合,C弹簧的数量为两组,检测杆体位于两组C弹簧之间。
一种智能感知芯片用检测方法,具体包括以下步骤:
S1、夹持装置对芯片进行夹持,输送带结构带动芯片在架体的内部横向移动,此时芯片封装处于水平分布,芯片两侧引脚向外延伸分布;
S2、根据相邻两组引脚之间标准间距调整两组检测杆体之间的距离,检测杆体通过A弹簧在套筒内部伸缩,采用转动螺纹杆的方式对两组检测杆体之间的距离进行调整;
S3、引脚间距检测:通过升降结构向下移动检测杆体,两检测杆体插入引脚之间的区域,随后拉动检测杆体向引脚方向移动,两组检测杆体上的检测件同时与两组引脚接触,则检测合格;
后端检测杆体上的检测件与引脚接触,或者引脚推动检测杆体位置发生变化,导致前端检测杆体上的检测件与引脚分离,则检测不合格,相邻两组引脚之间距离不同;
S4、引脚长度方向间距是否一致检测:上一步检测合格后,双向液压缸带动两组螺纹杆沿着引脚长度方向移动,螺纹杆带动两组检测杆体同步移动,在此过程中,若两检测杆体无位移变化,则引脚长度方向的间距一致,为合格,反之则不合格;
S5:引脚高度即相邻两组引脚是否处于同一水平面检测:两组检测杆体回复原位,移动组件带动检测杆体移动,两组检测杆体平移到芯片相邻两组引脚的上方,升降结构带动两组检测杆体向下移动,两组检测杆体的下端同时与两组引脚上端面接触,检测杆体的高度方向无变化,则两组引脚在同一水平面上,依次沿着引脚宽度方向选择三点检测,三次检测两组检测杆体的高度均无变化,则表示检测合格,反之则检测不合格;
调节两组检测杆体在引脚表面沿着引脚长度移动,通过检测在此过程中两组检测杆体的高度是否发生变化,以此来检测相邻两组引脚长度方向的高度是否保持一致,若两组检测杆体的高度均未发生变化,则表示检测合格,反之则检测不合格。
本发明的有益效果在于:本发明能够对芯片相邻两组引脚之间的距离进行检测,检测相邻两组引脚之间的距离是否相同,沿着引脚宽度方向选择三点进行检测,使得检测的结果更加准确,而且能够对相邻引脚是否处于同一高度进行检查,同时能够对引脚的长度进行检测,检测出引脚是否发生弯折,而且能够检测出哪组引脚不合格,使得对引脚的检测更加全面,有利于保证芯片的质量,避免不合格的芯片出厂,影响芯片的使用效果。
附图说明
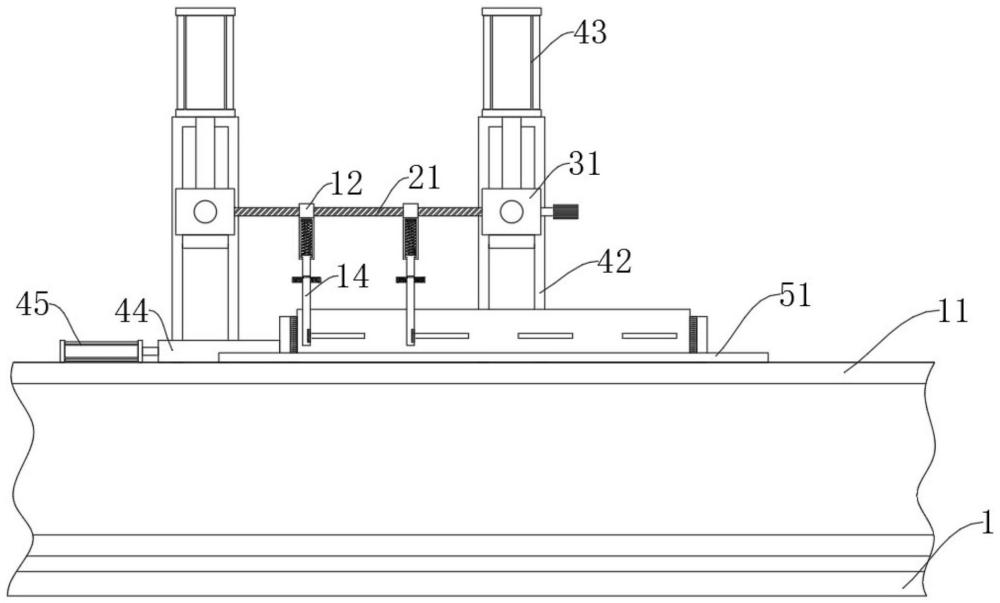
图1是本发明的整体结构示意图;
图2是本发明的整体结构俯视示意图;
图3是本发明的部分结构示意图;
图4是本发明的检测不合格状态示意图;
图5是本发明的检测不合格另一状态示意图;
图6是本发明的局部结构示意图;
图7是本发明的夹持装置结构示意图。
图中:1、架体;11、输送带结构;12、套筒;13、A弹簧;14、检测杆体;15、检测件;16、A感应器;21、螺纹杆;22、支撑块;31、双向液压缸;41、横梁;42、支撑架;43、电动推杆;44、支撑板;45、动力件;51、底板;52、滑槽;53、夹持板;54、B弹簧;55、橡胶垫;61、框架;62、C弹簧;63、B感应器。
具体实施方式
现在将参考示例实施方式讨论本文描述的主题。应该理解,讨论这些实施方式只是为了使得本领域技术人员能够更好地理解从而实现本文描述的主题,可以在不脱离本说明书内容的保护范围的情况下,对所讨论的元素的功能和排列进行改变。各个示例可以根据需要,省略、替代或者添加各种过程或组件。另外,相对一些示例所描述的特征在其他例子中也可以进行组合。
实施例一
如图1-图7所示,一种智能感知芯片用检测装置,包括架体1,架体1水平设置,架体1的中间设置有输送带结构11,输送带结构11的上方设置有夹持装置,夹持装置夹持芯片,夹持装置上方设置有检测机构,检测机构包括套筒12、A弹簧13、检测杆体14、检测件15及A感应器16,套筒12和检测杆体14立状设置,套筒12和检测杆体14的数量均为两组,每组套筒12和检测杆体14的数量为两个,检测杆体14滑动插装在套筒12的内部,A弹簧13设置在套筒12的内部,A弹簧13和检测杆体14固定连接,检测件15设置在检测杆体14一侧下部,A感应器16插装在套筒12内部,A感应器16与A弹簧13接触配合,套筒12的上方设置有调距结构、升降结构和检测组件,调距结构用于调节两组套筒12之前的距离,升降结构用于带动两组检测杆体14同步升降,检测组件检测两组引脚长度方向的高度是否发生变化。
夹持装置包括底板51、夹持板53和伸缩组件,底板51水平设置,底板51安装在输送带结构11上,夹持板53的数量为两组,夹持板53立状设置,夹持板53滑动插装在底板51上,伸缩组件带动两组夹持板53沿底板51的长度方向相互靠近或者远离。
伸缩组件包括滑槽52和B弹簧54,滑槽52开设在底板51上,滑槽52与夹持板53滑动连接,B弹簧54水平设置在滑槽52内部,且B弹簧54与夹持板53固定连接。
两组夹持板53相靠近的一侧均粘连有橡胶垫55。
调距结构包括螺纹杆21和支撑块22,螺纹杆21的数量为两组,螺纹杆21横向设置,螺纹杆21和架体1的长度方向平行,螺纹杆21和套筒12螺纹连接,支撑块22和螺纹杆21转动连接。
升降结构包括横梁41、支撑架42和驱动件,支撑架42立状设置,支撑架42的下方设置有移动组件,移动组件带动支撑架42沿架体1的长度方向往复移动,支撑架42和横梁41滑动连接,驱动件驱动横梁41在支撑架42上升降。
驱动件包括电动推杆43,电动推杆43固定安装在支撑架42的上方,电动推杆43立状设置,电动推杆43的输出端贯穿支撑架42并与横梁41固定连接。
移动组件包括支撑板44和动力件45,支撑板44固定安装在支撑架42的下方,支撑板44水平设置,支撑板44和架体1滑动连接,动力件45水平设置,动力件45和架体1固定连接,动力件45的输出端和支撑板44固定连接。
检测组件包括双向液压缸31、框架61、C弹簧62及B感应器63,双向液压缸31固定安装在横梁41的上方,双向液压缸31水平设置,双向液压缸31的输出端和支撑块22固定连接,框架61滑动套设在检测杆体14的外部,框架61水平设置,C弹簧62和B感应器63均插装在框架61的内部,且C弹簧62和B感应器63接触配合,C弹簧62的数量为两组,检测杆体14位于两组C弹簧62之间。
本实施例提出的装置的过程流程如下:
输送带结构11上具有多个夹持装置,夹持装置沿着输送带结构11的输送方向等距间隔分布。
首先,在输送带结构11的进料端,将各待检测的芯片封装依次装置到夹持装置内,具体为:将芯片水平放置在底板51上,拉动两组夹持板53相互远离,此时B弹簧54受到挤压发生变形,芯片位于两组夹持板53之间,松开夹持板53,在B弹簧54的弹力作用下,B弹簧54带动两组夹持板53在滑槽52的内部相互靠近,两组夹持板53对芯片移动方向的前后两端进行夹持,橡胶垫55能够增加夹持板53与芯片之间的摩擦力,同时能够减少夹持板53对芯片的损坏。
输送带结构11带动底板51和芯片同步移动,芯片移动到检测杆体14的下方之后,输送带结构11暂歇,根据相邻两组引脚之间标准间距调整两组检测杆体14之间的距离,转动螺纹杆21,螺纹杆21与套筒12螺纹连接,因此两组套筒12能够在螺纹杆21的外部相互靠近或者远离,从而调整两组检测杆体14之间的距离。
两组检测杆体14之间距离调整完成后,电动推杆43推动横梁41在支撑架42上向下移动,从而带动两组检测杆体14向下移动,使得两组检测杆体14能够插入引脚之间的区域,此时检测件15与引脚侧面对应,动力件45推动支撑板44在架体1上向后移动,从而带动两组检测杆体14同步移动,使得检测杆体14上的检测件15能够与引脚接触,两组检测杆体14上的检测件15同时与两组引脚接触的时候,对引脚的检测合格,后端检测杆体14上的检测件15未与引脚接触或者引脚推动检测杆体14的位置发生变化,导致前端检测杆体14上的检测件15与引脚分离,则表示检测不合格,相邻两组引脚之间的距离不同。
若相邻两组引脚之间距离检测合格后,将双向液压缸31与外部电源连接,双向液压缸31带动两组支撑块22同步移动,使得两组检测杆体14能够沿着引脚的长度方向移动,在此过程中,若两组检测杆体14没有发生位移变化,则引脚长度方向的间距一致,前端检测杆体14挤压框架61内部前端的C弹簧62时,B感应器63接收到前端检测杆体14发生位移变化的信息,从而能够判断前端引脚呈向前弯折状,前端检测杆体14挤压框架61内部后端的C弹簧62时,通过B感应器63传递的信息能够判断前端引脚呈向后弯折状,后端检测杆体14对引脚弯折检测的步骤同前端检测杆体14检测步骤一致,通过上述步骤不仅能够判断相邻两组引脚长度方向的距离是否相同,而且能够判断哪组引脚不合格。
上一步骤检测完成后,电动推杆43带动横梁41在支撑架42上向上移动,与此同时,输送带结构11带动芯片相邻两组引脚移动到两组检测杆体14的下方,电动推杆43再次带动两组检测杆下移,两组检测杆体14下端同时与两引脚接触,在此过程中,A感应器16检测到A弹簧13没有发生弹力变化,两组检测杆体14没有向套筒12的内部滑动,则表示检测合格,依次沿着引脚宽度方向选择三点进行检测,在检测的过程中,两组检测杆体14均没有高度变化则表示检测合格,反之,则不合格。
在对引脚宽度方向三点进行检测同时,双向液压缸31带动两组检测杆体14在这三点沿着引脚长度移动,检测引脚长度方向的高度是否保持一致,在检测的过程中,若两组检测杆体14均没有发生高度变化则表示检测合格,反之,则不合格。
通过上述动作,本发明能够对芯片相邻两组引脚之间的距离进行检测,检测相邻两组引脚之间的距离是否相同,沿着引脚宽度方向选择三点进行检测,使得检测的结果更加准确,而且能够对相邻引脚是否处于同一高度进行检查,同时能够对引脚的长度进行检测,检测出引脚是否发生弯折,而且能够检测出哪组引脚不合格,使得对引脚的检测更加全面,有利于保证芯片的质量,避免不合格的芯片出厂,影响芯片的使用效果。
实施例二
在本实施例中提出了一种智能感知芯片用检测方法,具体包括以下步骤:
S1、夹持装置对芯片进行夹持,输送带结构11带动芯片在架体1的内部横向移动,此时芯片封装处于水平分布,芯片两侧引脚向外延伸分布;
S2、根据相邻两组引脚之间标准间距调整两组检测杆体14之间的距离,检测杆体14通过A弹簧13在套筒12内部伸缩,采用转动螺纹杆21的方式对两组检测杆体14之间的距离进行调整;
S3、引脚间距检测:通过升降结构向下移动检测杆体14,两检测杆体14插入引脚之间的区域,随后拉动检测杆体14向引脚方向移动,两组检测杆体14上的检测件15同时与两组引脚接触,则检测合格;
后端检测杆体14上的检测件15与引脚接触,或者引脚推动检测杆体14位置发生变化,导致前端检测杆体14上的检测件15与引脚分离,则检测不合格,相邻两组引脚之间距离不同;
S4、引脚长度方向间距是否一致检测:上一步检测合格后,双向液压缸31带动两组螺纹杆21沿着引脚长度方向移动,螺纹杆21带动两组检测杆体14同步移动,在此过程中,若两检测杆体14无位移变化,则引脚长度方向的间距一致,为合格,反之则不合格;
S5:引脚高度即相邻两组引脚是否处于同一水平面检测:两组检测杆体14回复原位,输送带结构11带动芯片移动,芯片相邻两组引脚平移到两组检测杆体14的下方,升降结构带动两组检测杆体14向下移动,两组检测杆体14的下端同时与两组引脚上端面接触,检测杆体14的高度方向无变化,则两组引脚在同一水平面上,依次沿着引脚宽度方向选择三点检测,三次检测两组检测杆体14的高度均无变化,则表示检测合格,反之则检测不合格;
调节两组检测杆体14在引脚表面沿着引脚长度移动,通过检测在此过程中两组检测杆体14的高度是否发生变化,以此来检测相邻两组引脚长度方向的高度是否保持一致,若两组检测杆体14的高度均未发生变化,则表示检测合格,反之则检测不合格。
上面对本实施例的实施例进行了描述,但是本实施例并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实施例的启示下,还可做出很多形式,均属于本实施例的保护之内。
- 一种基于压缩感知的超高次谐波检测装置及检测方法
- 一种微流控芯片、微流控检测装置及微流控检测方法
- 一种激光二极管芯片光电属性检测方法和检测装置
- 一种适用于人工智能检测PCB的自动光学检测装置及其方法
- 一种机械设备振动智能检测装置及其检测方法
- 基于智能感知的芯片涂层薄膜质量检测方法
- 基于智能感知的芯片涂层薄膜质量检测方法