一种电磁驱动的模块化软体机器人移动及抓取的实现方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及软体机器人领域,尤其涉及一种电磁驱动的模块化软体机器人移动及抓取的实现方法。
背景技术
软体机器人和模块化相结合所构成的模块化软体机器人,既具有软体机器人无限的自由度,又具有模块化结构的多样性以及可重复性,模块化软体机器人不仅可以克服人际交互性能差的缺点,而且模块化使机器人还可以针对不同的环境和任务进行重新配置,软性材料的特性为人类互动提供了主动的灵活性和安全性。
例如,中国专利公开号为CN 114800469 A的专利,一种具有多模式运动的模块化仿生软体机器人,包括依次间隔设置的若干吸附机构,相邻的两所述吸附机构之间设置驱动机构,各所述驱动机构分别连接相邻的所述吸附机构,各所述吸附机构用于在通电状态下通过静电吸附外部物体;各所述驱动机构用于在通电状态下张开驱动连接的两所述吸附机构远离;各所述吸附机构用于通过至少一所述吸附机构吸附外部物体,以使至少一所述驱动机构张开驱动连接的两所述吸附机构远离。通过上述结构之间的相互配合以使软体机器人能够在不同的工作环境下进行移动。
现有软体机器人模块大多数不能够既具有变形能力又具有运动能力,兼具这两种特殊要求需要结构设计的巧妙,因此,本发明提出一种电磁驱动相结合的模块化软体机器人实现移动和旋转抓取的方法。
发明内容
为了解决上述背景技术所提到的技术需求或者至少解决部分上述技术需求,本发明提供了一种电磁驱动模块化软体机器人移动及旋转抓取动作的实现方法。
本发明提供了一种电磁驱动相结合的模块化软体机器人,有着较强的人机交互能力,用于刚体机器人无法到达的特殊环境进行作业,包括:主动机构、从动机构、驱动线缆、外部驱动机构;
所述主动机构由三个主动梯形模块构成;所述三个主动梯形模块包括第一部分主动梯形模块、第二部分主动梯形模块和第三部分主动梯形模块;所述三个主动梯形模块在机器人移动时起驱动从动梯形模块的作用;所述从动机构由三个从动梯形模块构成;所述三个从动梯形模块包括第一部分从动梯形模块、第二部分从动梯形模块和第三部分从动梯形模块;所述三个从动梯形模块与所述三个主动梯形模块放置在同一平面内,完全贴合平面的梯形模块的面为梯形模块的第一梯形面,另外一个与所述第一梯形面平行的梯形面为第二梯形面,梯形面有一个长底边、一个短底边和两条腰;所述三个主动梯形模块与所述三个从动梯形模块在同一平面内摆放成一条直线,摆放顺序按照第一部分从动梯形模块、第一部分主动梯形模块、第二部分从动梯形模块、第二部分主动梯形模块、第三部分从动梯形模块、第三部分主动梯形模块的顺序摆放,并且三个主动梯形模块的第一梯形面的长底边与三个从动梯形模块的第一梯形面的短底边共线;所述驱动线缆为一根缆绳,缆绳从放置好的六个梯形模块内部穿过,在模块化软体机器人进行抓取动作时起控制机器人旋转的作用;所述外部驱动结构放置在机器人头部第三部分主动梯形模块之外,与所述的驱动线缆相连,在机器人进行抓取动作时起驱动缆绳的作用。
优选的,所述三个主动梯形模块,每个主动梯形模块各自内部设有四个圆柱形空腔,所述四个圆柱形空腔分别水平放置在主动梯形模块内部四个角,所述四个圆柱形空腔的高与所述第一梯形面的底边平行,所述圆柱形空腔与前后模块的圆柱形空腔处于同心位置;所述每个主动梯形模块各自内部设有一个工字型通道,所述工字型通道在四个圆柱形空腔中间位置,所述工字型通道四个口分别与所述四个圆柱形空腔相通,且相通位置处于主动梯形模块内部,所述工字型通道另外预留一个通向外部的出口,出口从所述主动梯形模块的第二梯形面通向外部;所述每个主动梯形模块各自内部设有一个驱动线缆通道;所述驱动线缆通道将所述主动梯形模块贯穿,所述驱动线缆通道位于主动梯形模块内部所述四个圆柱形空腔中间位置且高与所述第二梯形面的底边平行。
优选的,所述三个从动梯形模块,每个从动梯形模块各自内部设有四个圆柱形空腔;所述四个圆柱形空腔分别水平放置在从动梯形模块内部四个角,所述四个圆柱形空腔的高与所述第一梯形面的底边平行,所述四个圆柱形空腔与前后主动梯形模块的四个圆柱形空腔和从动梯形模块的四个圆柱形空腔都处于同心位置;所述第二部分从动梯形模块和第三部分从动梯形模块内部各自设有一个驱动线缆通道;所述驱动线缆通道将所述第二部分从动梯形模块和第三部分从动梯形模块贯穿,所述驱动线缆通道位于模块内部所述四个圆柱形空腔中间位置且高与所述第二梯形面的底边平行,分别与前后主动梯形模块内部的驱动线缆通道以及从动动梯形模块内部的驱动线缆通道同心;所述第一部分从动梯形模块内部设有驱动线缆通道;所述驱动线缆通道不将第一部分从动梯形模块贯穿,只通向所述第一部分从动梯形模块内部,所述驱动线缆通道在所述第一部分从动梯形模块内部出口处还设有驱动线缆固定桩;所述驱动线缆固定桩位于第一部分从动梯形模块内部四个圆柱形空腔中间位置,用于缆绳一端缠绕换向。
优选的,所述外部驱动机构是一个直线电机。
优选的,所述主动梯形模块内部四个圆柱形空腔分别放置四个电磁铁,所述电磁铁是机器人主要动力源之一;所述工字型通道用来放置通电线束;通电线束接电磁铁经过工字型通道的出口与外界相连,所述通电线束用于传递电信号来控制电磁铁磁极;所述驱动线缆通道用来放置缆绳,缆绳通过特殊的缠绕方式可以在外部驱动机构驱动缆绳时将所述从动梯形模块进行180度旋转,用于机器人实现旋转抓取动作,所述缆绳在机器人移动时还起约束自由度的作用。
优选的,所述从动梯形模块内部四个圆柱形空腔分别放置四个圆柱形永磁铁;所述永磁铁的放置应该使得模块同一侧保证同一电极;所述驱动线缆通道用于放置驱动线缆,所述驱动线缆固定桩用于定位驱动线缆一端。
优选的,所述驱动线缆通道中间设有硅胶隔离层;所述硅胶隔离层竖直放置将驱动线缆通道隔离成左右两个半圆孔,用于驱动线缆在工作时互不干扰。
优选的,所述驱动线缆通道中间设有硅胶隔离层;所述硅胶隔离层竖直放置将驱动线缆通道隔离成左右两个半圆孔,用于驱动线缆在工作时互不干扰。
本发明提供了一种电磁驱动相结合的模块化软体机器人的设计及实现移动方法,包括如下步骤:
① 将三个主动梯形模块内部四个圆柱形空腔分别装上电磁铁,每个主动梯形模块的电磁铁应该在改变电流方向时保证同一磁极向外,若不是同一磁极,不能有效保证软体机器人的正常移动,线束经预留的工字型通道通向外部;
② 将三个从动梯形模块内部四个圆柱形空腔分别装上圆柱形永磁铁;每个从动梯形模块圆柱形永磁铁应该保证同一磁极向外,若不是同一磁极,不能有效保证软体机器人的正常移动;
③ 将所述三个主动梯形模块与所述三个从动梯形模块在同一平面内摆放成一条直线,按照第一部分从动梯形模块、第一部分主动梯形模块、第二部分从动梯形模块、第二部分主动梯形模块、第三部分从动梯形模块、第三部分主动梯形模块的顺序摆放,并且三个主动梯形模块的第一梯形面的长底边与三个从动梯形模块的第一梯形面的短底边共线,将驱动线缆依次穿过三个主动梯形模块内部预留的驱动线缆通道和三个从动梯形模块内部预留的驱动线缆通道将六个梯形模块串联起来;
④ 驱动线缆一端绕在第一部分从动梯形模块内部的驱动线缆固定桩上,另一端绕在所述外部驱动机构的电机轴上;
由于电磁铁线圈缠绕方式固定,因此外界可通过开关闭合状态改变主动梯形模块电磁铁磁极方向,改变电流方向相当于将电磁铁磁极从N级变为S级或从S级变为N级;由左向右依次为第一部分从动梯形模块、第一部分主动梯形模块、第二部分从动梯形模块、第二部分主动梯形模块、第三部分从动梯形模块、第三部分主动梯形模块;
⑤ 0秒初设定为平衡状态,第三部分主动梯形模块左侧反向给电,第三部分主动梯形模块左侧的电磁铁中的电流方向是由右向左,磁极在外侧为 N,第二部分主动梯形模块和第一部分主动梯形模块两侧反向给电,通过第二部分主动梯形模块和第一部分主动梯形模块两侧的电磁铁的电流方向是由右向左,磁极在外为N极;
⑥ 在0s末1s初时刻,第三部分主动梯形模块左侧由反向给电切换至正向给电,此时第三部分主动梯形模块左侧电磁铁通过的电流方向由左向右,磁极对外为S极,同时受第三部分主动梯形模块左侧的吸引力和第二部分主动梯形模块右侧的排斥力,在1s初到1s末时间段里,第三部分从动梯形模块在受到两个力的作用下向第三部分主动梯形模块移动,1s初到1s末,第三部分从动梯形模块向第三部分主动梯形模块移动;
⑦ 在1s末2s初时刻,第三部分主动梯形模块左侧断电,第二部分主动梯形模块右侧由反向给电切换至正向给电,此时第二部分主动梯形模块右侧通过电磁铁的电流方向由左向右,磁极对外为S极,同时受第三部分从动梯形模块左侧的吸引力和第二部分从动梯形模块右侧的排斥力,在2s初到2s末时间段里,第二部分主动梯形模块在受到两个作用力的情况下向第三部分从动梯形模块移动,2s初到2s末,第二部分主动梯形模块向第三部分从动梯形模块移动;
⑧ 在2s末3s初时刻,第二部分主动梯形模块右侧断电,第二部分主动梯形模块左侧由反向给电切换至正向给电,此时第二部分主动梯形模块左侧通过电磁铁的电流方向由左向右,磁极对外为S极,此时第二部分从动梯形模块的受力情况为,同时受第二部分主动梯形模块左侧的吸引力和第一部分主动梯形模块右侧的排斥力,在3s初到3s末时间段里,第二部分从动梯形模块在受到两个作用力的情况下向第二部分主动梯形模块移动,3s初到3s末,第二部分从动梯形模块向第二部分主动梯形模块移动;
⑨ 在3s末4s初时刻,第二部分主动梯形模块左侧断电,第一部分主动梯形模块右侧由反向给电切换至正向给电,此时第一部分主动梯形模块右侧通过电磁铁的电流方向由左向右,磁极对外为S极,此时第一部分主动梯形模块的受力情况为,同时受第二部分从动梯形模块左侧的吸引力和第一部分从动梯形模块右侧的排斥力,在4s初到4s末时间段里,第一部分主动梯形模块在受到两个作用力的情况下向第二部分从动梯形模块移动,4s初到4s末,第一部分主动梯形模块向第二部分从动梯形模块移动;
⑩ 在4s末5s初时刻,第一部分主动梯形模块右侧断电,第一部分主动梯形模块左侧由反向给电切换至正向给电,此时第一部分主动梯形模块左侧通过电磁铁的电流方向由左向右,磁极对外为 S极,此时第一部分从动梯形模块的受力情况为,受第一部分主动梯形模块左侧的吸引力在5s初到5s末时间段里,第一部分从动梯形模块向第一部分主动梯形模块移动,5s初~5s末,第一部分从动梯形模块向第一部分主动梯形模块移动;5s末时第一部分从动梯形模块向第一部分主动梯形模块移动;5s末6s初时刻进入循环状态,与0s初状态一样。
本发明提供了一种电磁驱动相结合的模块化软体机器人的设计及实现旋转抓取的方法,包括如下步骤:
① 摆放模块,由左向右依次为第一部分从动梯形模块、第一部分主动梯形模块、第二部分从动梯形模块、第二部分主动梯形模块、第三部分从动梯形模块、第三部分主动梯形模块;
② 将三个主动梯形模块内部四个圆柱形空腔分别装上电磁铁,每个主动梯形模块的电磁铁应该在改变电流方向时保证同一磁极向外,线束经预留的工字型通道通向外部;
③ 将三个从动梯形模块内部四个圆柱形空腔分别装上圆柱形永磁铁;每个从动梯形模块圆柱形永磁铁应该保证同一磁极向外;
④ 将所述三个主动梯形模块与所述三个从动梯形模块在同一平面内摆放成一条直线,按照第一部分从动梯形模块、第一部分主动梯形模块、第二部分从动梯形模块、第二部分主动梯形模块、第三部分从动梯形模块、第三部分主动梯形模块的顺序摆放,并且三个主动梯形模块的第一梯形面的长底边与三个从动梯形模块的第一梯形面的短底边共线,将驱动线缆依次穿过三个主动梯形模块内部预留的驱动线缆通道和三个从动梯形模块内部预留的驱动线缆通道将六个梯形模块串联起来;
⑤ 驱动线缆一端绕在第一部分从动梯形模块内部的驱动线缆固定桩上,另一端绕在所述外部驱动机构的电机轴上;
⑥ 直线电机开始工作时,电机轴旋转带动缆绳在电机轴上做缠绕运动,此时缆绳带动第三部分主动梯形模块、第二部分主动梯形模块和第一部分主动梯形模块做180度旋转运动;
⑦ 三个主动梯形模块完成180度旋转运动后,三个主动梯形模块的第一梯形面的长底边与三个从动梯形模块的第一梯形面的长底边共线,此时机器人完成一次变形,直线电机继续工作;
⑧ 随着缆绳继续缠绕,已经发生一次变形的机器人整体旋转,此时第一部分从动梯形模块、第一部分主动梯形模块、第二部分从动梯形模块、第二部分主动梯形模块、第三部分从动梯形模块、第三部分主动梯形模块围成一个圆形,并且在缆绳的驱动下收紧,发生第二次变形,完成抓取动作。
本发明提供的上述技术方案与现有技术方案相比有如下优点:
(1)本发明选取电磁驱动相结合的方式,使得模块化软体机器人具有既能实现移动动作又能实现抓取动作的特点;
(2)本发明用磁驱动模块化软体机器人完成移动动作,用直线电机驱动模块化软体机器人完成抓取动作,使得模块化软体机器人移动抓取两个动作互不干涉;
(3)本发明提供的模块化软体机器人主体机构为四棱柱形状,不仅确保了模块化软体机器人具有无限自由度和构型多变的优势,而且确保了此款模块化软体机器人可以完成移动和抓取动作;
(4)本发明提供的电磁驱动模块化软体机器人结构简单,主体使用硅胶制作,可以使用3D打印机进行打印组装,使用成本较低。
附图说明
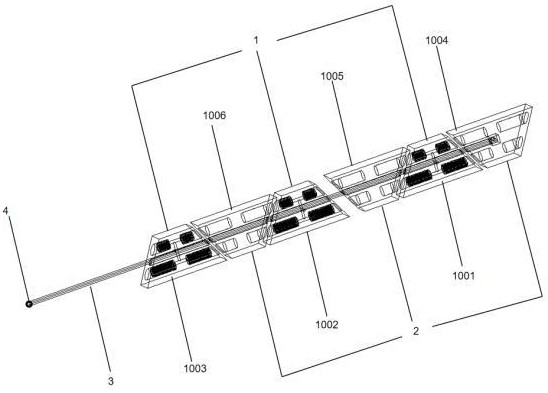
图1是本发明实施例提供的一种电磁驱动相结合的模块化软体机器人的结构示意图。
图2是本发明实施例提供的一种电磁驱动相结合的模块化软体机器人的三个相同的主动梯形模块内部结构示意图。
图3是本发明实施例提供的一种电磁驱动相结合的模块化软体机器人的第二部分从动梯形模块和第三部分从动梯形模块内部结构示意图。
图4是本发明实施例提供的一种电磁驱动相结合的模块化软体机器人的第一部分从动梯形模块内部结构示意图。
图5是本发明实施例提供的一种电磁驱动相结合的模块化软体机器人实现旋转抓取动作时的结构示意图。
图6是本发明实施例提供的一种电磁驱动相结合的模块化软体机器人实现移动动作的各形态示意图。
图7是本发明实施例提供的一种电磁驱动相结合的模块化软体机器人实现旋转抓取动作时的形态示意图。
图中:1—主动机构;2—从动机构;3—驱动线缆;4—外部驱动机构;101—主动梯形模块;102—从动梯形模块;1001—第一部分主动梯形模块;1002—第二部分主动梯形模块;1003—第三部分主动梯形模块;1004—第一部分从动梯形模块;1005—第二部分从动梯形模块;1006—第三部分从动梯形模块;10001—第一梯形面;10002—第二梯形面;10003—长底边;10004—短底边;10005—腰;103—缆绳;201—圆柱形空腔;202—工字型通道;203—工字型通道通向外部出口;204—驱动线缆通道;205—硅胶隔离层;206—电磁铁;301—圆柱形空腔;302—驱动线缆通道;303—圆柱形永磁铁;304—硅胶隔离层;401—驱动线缆固定桩;501—直线电机。
具体实施方式
参阅图1-7,本发明提供一种技术方案:一种电磁驱动相结合的模块化软体机器人完成移动及抓取动作的方法,包括:主动机构1、从动机构2、驱动线缆3、外部驱动机构4、主动梯形模块101、从动梯形模块102、第一部分主动梯形模块1001、第二部分主动梯形模块1002、第三部分主动梯形模块1003、第一部分从动梯形模块1004、第二部分从动梯形模块1005、第三部分从动梯形模块1006、第一梯形面10001、第二梯形面10002、长底边10003;短底边10004;腰10005;驱动线缆103、圆柱形空腔201、工字型通道202、工字型通道通向外部出口203、驱动线缆通道204、硅胶隔离层205、电磁铁206、圆柱形空腔301、驱动线缆通道302、圆柱形永磁铁303、硅胶隔离层304、驱动线缆固定桩401、直线电机501。
所述主动机构1由三个主动梯形模块101构成,主动梯形模块内部放置电磁铁206,用于改变磁极,与从动梯形模块102共同驱动模块化软体机器人完成移动动作;所述三个主动梯形模块101为机器人的主动部分,所述主动梯形模块101由硅胶制作;所述从动机构2由三个从动梯形模块102构成;从动梯形模块102内部放置圆柱形永磁铁303,与主动梯形模块101共同完成模块化软体机器人完成移动动作;所述三个从动梯形模块102与所述三个主动梯形模块101放置在同一平面内,完全贴合平面的梯形模块的面为梯形模块的第一梯形面10001,另外一个与所述第一梯形面10001平行的梯形面为第二梯形面10002,梯形面有一个长底边10003、一个短底边10004和两条腰10005;所述三个主动梯形模块101与所述三个从动梯形模块102在同一平面内摆放成一条直线,摆放顺序按照第一部分从动梯形模块1004、第一部分主动梯形模块1001、第二部分从动梯形模块1005、第二部分主动梯形模块1002、第三部分从动梯形模块1006、第三部分主动梯形模块1003的顺序摆放,并且三个主动梯形模块101的第一梯形面10001的长底边10003与三个从动梯形模块102的第一梯形面10001的短底边10004共线;所述从动梯形模块102由硅胶制作;所述驱动线缆3为一根缆绳103,缆绳103依次穿过六个梯形模块,用于将六个梯形模块串联起来,缆绳103在模块化软体机器人移动时起到约束自由度的作用,在模块化软体机器人旋转抓取时,起到控制从动梯形模块旋转的作用,主要用于模块化软体机器人完成旋转抓取动作;所述外部驱动结构4为直线电机501,放置在机器人尾部从动梯形模块之外;所述直线电机501电机轴上缠绕所述驱动线缆3一端,用于驱动缆绳103,缆绳103带动模块化软体机器人旋转,实现抓取。
所述三个主动梯形模块101,每个主动梯形模块101各自内部设有四个圆柱形空腔201;所述四个圆柱形空腔201分别水平放置在主动梯形模块101内部四个角,所述四个圆柱形空腔201的高与所述第一梯形面10001的底边平行,所述圆柱形空腔201与前后模块的圆柱形空腔201处于同心位置;所述每个主动梯形模块101各自内部设有一个工字型通道202;所述工字型通道202在四个圆柱形空腔中间位置,所述工字型通道202四个口分别与所述四个圆柱形空腔201相通,且相通位置处于主动梯形模块101内部,所述工字型通道202另外预留一个通向外部的出口203,出口203从所述主动梯形模块101的第二梯形面10002通向外部;所述每个主动梯形模块101各自内部设有一个驱动线缆通道204;所述驱动线缆通道204将所述主动梯形模块101贯穿,所述驱动线缆通道204位于主动梯形模块101内部所述四个圆柱形空腔201中间位置且高与所述第二梯形面10002的底边平行。
所述三个从动梯形模块102,每个从动梯形模块102各自内部设有四个圆柱形空腔301;所述四个圆柱形空腔301分别水平放置在从动梯形模块102内部四个角,所述四个圆柱形空腔301的高与所述第一梯形面10001的底边平行,所述四个圆柱形空腔301与前后主动梯形模块101的四个圆柱形空腔201和从动梯形模块102的四个圆柱形空腔301都处于同心位置;所述第二部分从动梯形模块1005和第三部分从动梯形模块1006内部各自设有一个驱动线缆通道302;所述驱动线缆通道302将所述第二部分从动梯形模块1005和第三部分从动梯形模块1006贯穿,所述驱动线缆通道302位于模块内部所述四个圆柱形空腔301中间位置且高与所述第二梯形面10002的底边平行,分别与前后主动梯形模块101内部的驱动线缆通道204以及从动动梯形模块102内部的驱动线缆通道302同心;所述第一部分从动梯形模块1004内部设有驱动线缆通道305;所述驱动线缆通道305不将第一部分从动梯形模块1004贯穿,只通向所述第一部分从动梯形模块1004内部,所述驱动线缆通道305在所述第一部分从动梯形模块1004内部出口处还设有驱动线缆固定桩401;所述驱动线缆固定桩401位于第一部分从动梯形模块1004内部四个圆柱形空腔301中间位置,用于缆绳103一端缠绕换向。
所述主动梯形模块101内部四个圆柱形空腔201分别放置四个电磁铁206;所述电磁铁206是机器人主要动力源之一;所述工字型通道202用来放置通电线束;通电线束接电磁铁206经过工字型通道202的出口203与外界相连,所述通电线束用于传递电信号来控制电磁铁206磁极;所述驱动线缆通道204用来放置缆绳103;缆绳103通过特殊的缠绕方式可以在外部驱动机构4驱动缆绳103时将所述从动梯形模块102进行180度旋转,用于机器人实现旋转抓取动作,所述缆绳103在机器人移动时还起约束自由度的作用。
所述从动梯形模块102内部四个圆柱形空腔301分别放置四个圆柱形永磁铁303;所述永磁铁303的放置应该使得模块同一侧保证同一电极;所述驱动线缆通道302用于放置驱动线缆3;所述驱动线缆固定桩401用于定位驱动线缆3一端。
所述驱动线缆通道204中间设有硅胶隔离层304;所述硅胶隔离层304竖直放置将驱动线缆通道204隔离成左右两个半圆孔,用于驱动线缆3在工作时互不干扰。
所述驱动线缆通道302中间设有硅胶隔离层205;所述硅胶隔离层205竖直放置将驱动线缆通道302隔离成左右两个半圆孔,用于驱动线缆3在工作时互不干扰。
所述驱动线缆3通过特殊的缠绕方式可以在直线电机501驱动缆绳103时将所述从动梯形模块102进行180度旋转,用于机器人实现旋转抓取动作,所述驱动线缆3在机器人移动时还起约束自由度的作用。
一种电磁驱动相结合的模块化软体机器人实现移动的步骤:
① 将三个主动梯形模块101内部四个圆柱形空腔201分别装上电磁铁206,每个主动梯形模块101的电磁铁206应该在改变电流方向时保证同一磁极向外,若不是同一磁极,不能有效保证软体机器人的正常移动,线束经预留的工字型通道202通向外部;
② 将三个从动梯形模块102内部四个圆柱形空腔301分别装上圆柱形永磁铁303;每个从动梯形模块102圆柱形永磁铁303应该保证同一磁极向外,若不是同一磁极,不能有效保证软体机器人的正常移动;
③ 将所述三个主动梯形模块101与所述三个从动梯形模块102在同一平面内摆放成一条直线,按照第一部分从动梯形模块1004、第一部分主动梯形模块1001、第二部分从动梯形模块1005、第二部分主动梯形模块1002、第三部分从动梯形模块1006、第三部分主动梯形模块1003的顺序摆放,并且三个主动梯形模块101的第一梯形面10001的长底边与三个从动梯形模块102的第一梯形面10001的短底边共线,将驱动线缆3依次穿过三个主动梯形模块101内部预留的驱动线缆通道204和三个从动梯形模块102内部预留的驱动线缆通道302将六个梯形模块串联起来;
④ 驱动线缆3一端绕在第一部分从动梯形模块1004内部的驱动线缆固定桩上401,另一端绕在所述外部驱动机构4的电机轴上;
由于电磁铁206线圈缠绕方式固定,因此外界可通过开关闭合状态改变主动梯形模块101电磁铁206磁极方向,改变电流方向相当于将电磁铁206磁极从N级变为S级或从S级变为N级;由左向右依次为第一部分从动梯形模块1004、第一部分主动梯形模块1001、第二部分从动梯形模块1005、第二部分主动梯形模块1002、第三部分从动梯形模块1006、第三部分主动梯形模块1003;
⑤ 0秒初设定为平衡状态,第三部分主动梯形模块1003左侧反向给电,第三部分主动梯形模块1003左侧的电磁铁206中的电流方向是由右向左,磁极在外侧为 N,第二部分主动梯形模块1002和第一部分主动梯形模块1001两侧反向给电,通过第二部分主动梯形模块1002和第一部分主动梯形模块1001两侧的电磁铁206的电流方向是由右向左,磁极在外为N极;
⑥ 在0s末1s初时刻,第三部分主动梯形模块1003左侧由反向给电切换至正向给电,此时第三部分主动梯形模块1003左侧电磁铁206通过的电流方向由左向右,磁极对外为S极,同时受第三部分主动梯形模块1003左侧的吸引力和第二部分主动梯形模块1002右侧的排斥力,在1s初到1s末时间段里,第三部分从动梯形模块1006在受到两个力的作用下向第三部分主动梯形模块1003移动,1s初到1s末,第三部分从动梯形模块1006向第三部分主动梯形模块1003移动;
⑦ 在1s末2s初时刻,第三部分主动梯形模块1003左侧断电,第二部分主动梯形模块1002右侧由反向给电切换至正向给电,此时第二部分主动梯形模块1002右侧通过电磁铁206的电流方向由左向右,磁极对外为S极,同时受第三部分从动梯形模块1006左侧的吸引力和第二部分从动梯形模块1005右侧的排斥力,在2s初到2s末时间段里,第二部分主动梯形模块1002在受到两个作用力的情况下向第三部分从动梯形模块1006移动,2s初到2s末,第二部分主动梯形模块1002向第三部分从动梯形模块1006移动;
⑧ 在2s末3s初时刻,第二部分主动梯形模块1002右侧断电,第二部分主动梯形模块1002左侧由反向给电切换至正向给电,此时第二部分主动梯形模块1002左侧通过电磁铁206的电流方向由左向右,磁极对外为S极,此时第二部分从动梯形模块1005的受力情况为,同时受第二部分主动梯形模块1002左侧的吸引力和第一部分主动梯形模块1001右侧的排斥力,在3s初到3s末时间段里,第二部分从动梯形模块1005在受到两个作用力的情况下向第二部分主动梯形模块1002移动,3s初到3s末,第二部分从动梯形模块1005向第二部分主动梯形模块1002移动;
⑨ 在3s末4s初时刻,第二部分主动梯形模块1002左侧断电,第一部分主动梯形模块1001右侧由反向给电切换至正向给电,此时第一部分主动梯形模块1001右侧通过电磁铁206的电流方向由左向右,磁极对外为S极,此时第一部分主动梯形模块1001的受力情况为,同时受第二部分从动梯形模块1005左侧的吸引力和第一部分从动梯形模块1004右侧的排斥力,在4s初到4s末时间段里,第一部分主动梯形模块1001在受到两个作用力的情况下向第二部分从动梯形模块1005移动,4s初到4s末,第一部分主动梯形模块1001向第二部分从动梯形模块1005移动;
⑩ 在4s末5s初时刻,第一部分主动梯形模块1001右侧断电,第一部分主动梯形模块1001左侧由反向给电切换至正向给电,此时第一部分主动梯形模块1001左侧通过电磁铁206的电流方向由左向右,磁极对外为 S极,此时第一部分从动梯形模块1004的受力情况为,受第一部分主动梯形模块1001左侧的吸引力在5s初到5s末时间段里,第一部分从动梯形模块1004向第一部分主动梯形模块1001移动,5s初~5s末,第一部分从动梯形模块1004向第一部分主动梯形模块1001移动;5s末时第一部分从动梯形模块1004向第一部分主动梯形模块1001移动;5s末6s初时刻进入循环状态,与0s初状态一样。
一种电磁驱动相结合的模块化软体机器人实现旋转抓取动作的步骤:
由左向右依次为第一部分从动梯形模块1004、第一部分主动梯形模块1001、第二部分从动梯形模块1005、第二部分主动梯形模块1002、第三部分从动梯形模块1006、第三部分主动梯形模块1003;
① 将三个主动梯形模块101内部四个圆柱形空腔201分别装上电磁铁206,三个主动梯形模块101的电磁铁206应该在改变电流方向时保证同一磁极向外,线束经预留的工字型通道202通向外部;
② 将三个从动梯形模块102内部四个圆柱形空腔301分别装上圆柱形永磁铁303;三个从动梯形模块102圆柱形永磁铁303应该保证同一磁极向外;
③ 将所述三个主动梯形模块101与所述三个从动梯形模块102在同一平面内摆放成一条直线,按照第一部分从动梯形模块1004、第一部分主动梯形模块1001、第二部分从动梯形模块1005、第二部分主动梯形模块1002、第三部分从动梯形模块1006、第三部分主动梯形模块1003的顺序摆放,并且三个主动梯形模块101的第一梯形面10001的长底边10003与三个从动梯形模块102的第一梯形面10001的短底边10004共线,将驱动线缆3依次穿过三个主动梯形模块101内部预留的驱动线缆通道204和三个从动梯形模块102内部预留的驱动线缆通道302将六个梯形模块串联起来;
④ 驱动线缆3一端绕在第一部分从动梯形模块1004内部的驱动线缆固定桩401上,另一端绕在所述外部驱动机构4的电机轴上;
⑤ 直线电机501开始工作时,电机轴旋转带动缆绳103在电机轴上做缠绕运动,此时缆绳103带动第三部分主动梯形模块1003、第二部分主动梯形模块1002和第一部分主动梯形模块1001做180度旋转运动;
⑥ 三个主动梯形模块101完成180度旋转运动后,三个主动梯形模块101的第一梯形面10001的长底边10003与三个从动梯形模块102的第一梯形面10001的长底边10003共线,此时机器人完成一次变形,直线电机501继续工作;
⑦ 随着缆绳103继续缠绕,已经发生一次变形的机器人整体旋转,此时第一部分从动梯形模块1004、第一部分主动梯形模块1001、第二部分从动梯形模块1005、第二部分主动梯形模块1002、第三部分从动梯形模块1006、第三部分主动梯形模块1003围成一个圆形,并且在缆绳(103)的驱动下收紧,发生第二次变形,完成抓取动作。