非开阔环境下基站辅助卫星复观测增强定位方法
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及卫星观测定位领域,特别涉及非开阔环境下基站辅助卫星复观测增强定位方法。
背景技术
卫星导航能够向各类用户和运动平台提供准确、连续的位置、速度和时间信息。全球卫星导航定位系统是一种使用卫星对某物进行准确定位的技术,它从最初的定位精度低、不能实时定位、难以提供及时的导航服务,发展到现如今的高精度GPS全球定位系统,实现了在任意时刻、地球上任意一点都可以同时观测到4颗卫星,同时还实现了导航、定位、授时等功能。
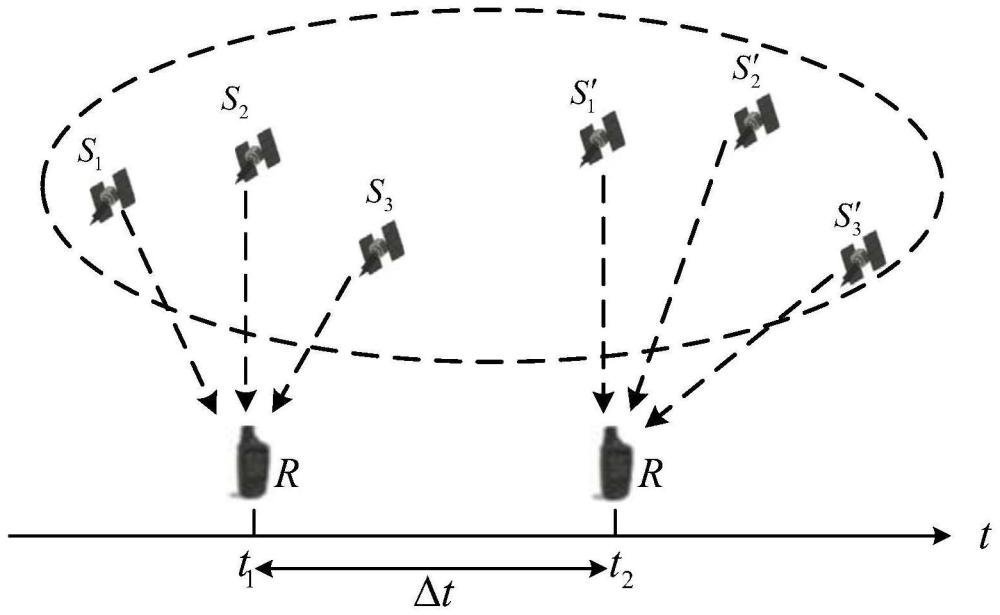
卫星复观测是在卫星观测后间隔一定时间,对空间的卫星进行再次观测,从而利用两次观测的数据组合,完成相关的数据分析或者其它操作。然而,在目前的卫星定位中至少需要四观测条件才能满足最基本的定位,因此目前在可见星不满足四个时,还无法对可见星进行观测定位。
发明内容
本发明目的是为了解决现有的卫星定位方法还存在当可见星不满足四颗的时候无法实现卫星定位的问题,而提出了非开阔环境下基站辅助卫星复观测增强定位方法。
非开阔环境下基站辅助卫星复观测增强定位方法具体过程为:
步骤一、在t
步骤二、在t
其中,t
步骤三、对比步骤一和步骤二获得的卫星位置,获得观测场景分类;
步骤四、根据步骤三获得的观测场景分类获得观测方程;
步骤五、求解步骤四获得的观测方程获得卫星定位信息。
本发明的有益效果为:
本发明提出了在仅能观测到三颗可见星或两颗可见星时,获取卫星定位的方法。当UE只能观测到三颗可见星或两颗可见星时,利用传统方法无法实现定位,但本发明采用复观测的方法,结合两次观测结果,获取两次观测场景的对比结果,并建立观测方程,解决了可见星不满足四颗的时候无法实现卫星定位的问题。
附图说明
图1为三颗可见星复观测示意图。
具体实施方式
具体实施方式一:本实施方式非开阔环境下基站辅助卫星复观测增强定位方法具体过程为:
步骤一、在t
t
情况一:观测到三颗可见星,可见星的位置分别记为S
情况二:观测到两颗可见星,可见星的位置分别记为S
步骤二、在t
其中,t
t
当t
当t
步骤三、对比步骤一和步骤二获得的卫星位置,获得观测场景分类;
观测到三颗可见星时,场景分类如下:
表1三颗可见星复观测场景分类
在卫星导航中,在相同的测量误差条件下,较小的DOP可使得卫星定位有较小的误差,而DOP的值又与卫星的几何分布有关,当卫星分布在接收机头顶的四周时,它与接收机所形成的锥形多面体所包围的空间体积越大,此时卫星的几何分布也就越好,所引起的GDOP的值也就越小,而当卫星集中到一处或者一条直线上时,所形成的锥体包围的空间体积也就最小,此时GDOP的值也就就到,进而定位误差也就较大,定位精度也就较差。因此对于复观测的三星,虽然有三颗卫星虚拟存在,但在定位时它们也参与了定位解算,因此所组成的空间几何布局也是需要考虑的。
场景I:由于各个卫星之间相互独立,因此这两个时刻所观测到的全部卫星就可以完全作为独立的6个观测量来使用。同时由于6颗卫星不可能集中在一处或者一条直线上,因此具有较好的几何空间布局,不会影响到接收机的定位精度。
场景II:不同的5颗卫星可以作为独立的观测量,并可以和接收机形成较好的空间布局。在间隔Δt的两次观测中,由于包含相同编号的同一颗卫星,当间隔时间Δt较小时,相同编号的卫星在t
场景III:由于两次观测后,3颗卫星中有两颗完全相同,因此两次观测后存在4个独立的观测量,它们同样也可以与接收机组成较好的空间几何布局。在前后两次的观测中,由于第二次观测的卫星中有两颗编号与第一次观测相同,当间隔的时间Δt较小时,相同编号的卫星在t
场景IV:由于两次观测后三颗卫星完全相同,因此当Δt较小时,它们在t
观测到两颗可见星时,场景分类如下:
表2两颗可见星复观测场景分类
场景I:由于各个卫星之间相互独立,因此这两个时刻所观测到的全部卫星就可以完全作为独立的4个观测量来使用。同时由于4颗卫星不可能集中在一处或者一条直线上,因此它们具有一定的空间布局,完全可以按照4颗可见星来使用,而不会有较差的定位精度。
场景II:当两次观测组合成的4颗星中有一颗重复时,4颗星中只有3个独立的观测分量。当间隔时间Δt较小时,相同编号的卫星在t
场景III:由于两次观测后两颗卫星完全相同,因此当Δt较小时,它们在t
步骤四、根据步骤三获得观测场景分类获得观测方程;
首先,获取UE所在位置卯酉圈观测方程:
具备A-GNSS功能的UE定位时,首先得到UE所在小区基站位置先验信息(x
这里,N
然后,获取观测方程:
对于三星复观测,通过两次对三颗卫星重复观测,可以得到6个卫星观测条件组合,将该观测组合与UE所在位置的卯酉圈观测方程联合,可得如下观测方程:
类似基站辅助三星复观测方法,当具备A-GNSS功能的UE定位时,同样利用UE所在基站位置作为先验信息(x
对两颗可见星进行重复观测,将这两次观测量组合成的4个卫星观测条件,然后联立UE位置的高度观测条件,可得
步骤五、求解步骤四获得的观测方程获得卫星定位信息。