一种智慧应急管理装置
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及应急管理装置技术领域,具体为一种智慧应急管理装置。
背景技术
智慧应急管理就是运用信息和通信技术手段感测、分析、整合城市运行核心系统的各项关键信息,从而对包括民生、环保、公共安全、城市服务、工商业活动在内的各种需求做出智能响应,其实质是利用先进的信息技术,实现城市智慧式管理和运行,进而为城市中的人创造更美好的生活,促进城市的和谐、可持续成长,随着人类社会的不断发展,未来城市将承载越来越多的人口,目前,我国正处于城镇化加速发展的时期,部分地区"城市病"问题日益严峻,为解决城市发展难题,实现城市可持续发展,建设智慧城市已成为当今世界城市发展不可逆转的历史潮流,其中智慧应急管理设备是应对于特重大事故灾害的危险问题提出的,应急管理设备是指政府及其他公共机构在突发事件的事前预防、事发应对、事中处置和善后恢复过程中,通过建立必要的应对机制,采取一系列必要措施,应用科学、技术、规划与管理等手段,保障公众生命、健康和财产安全;促进社会和谐健康发展的有关活动。
但现有技术中,目前,对于分布设立在城市中的应急管理装置,当发生险情时,救援人员需要赶往所安设位置后,打开应急管理装置后,对火灾等进行救援工作,救援作业效率较低,易错过最佳救援时机,且对于应急管理装置中的救援设备用完后,不易进行补充,需要更换后,才能继续使用,影响救援工作,因此就需要提出一种新的智慧应急管理装置。
发明内容
本发明的目的在于提供一种智慧应急管理装置,以解决上述背景技术提出救援作业效率较低,易错过最佳救援时机,且救援设备用完后不易进行补充,需要更换后,才能继续使用,影响救援工作的问题。
为实现上述目的,本发明提供如下技术方案:一种智慧应急管理装置,包括机体,所述机体的前端一体成型设置有前舱室和安放柜,所述安放柜内部安装设置有三组救援灭火设备组件,三组所述救援灭火设备组件的底部设置有相对应三根补充管,三根所述补充管的侧端连通设置有储气罐,且所述机体的底壁表面上分别安装设置有锂电池组和控制处理器,所述前舱室的内部安装设置有GPRS装置,所述前舱室的左右两侧设置安装有语音播报器,且所述前舱室的内部安装设置有无线射频芯片组,所述机体的顶部紧固连接有顶舱,所述机体的内部安装设置有传动调节组件,所述传动调节组件的上方设置有无人机,其中,所述顶舱有供所述无人机升降的起落口端,所述机体的后端一体成型有后舱室,所述后舱室的顶壁表面开设有投放口,所述后舱室的内部顶端安装设置有转动输送组件,且所述后舱室的内部顶壁表面紧固安装有自动旋转轴座,所述自动旋转轴座的表面上安装设置有角度传感器,且所述自动旋转轴座的底部设置安装有小型电动伸缩杆,所述小型电动伸缩杆的底部紧固连接有微型负压泵,所述微型负压泵的内部底端安装设置有负压真空吸盘,且所述后舱室的侧壁表面开设有斜槽输送管;
所述转动输送组件包括转动电机,所述转动电机的内部输出轴端外部安装有主转动轮,其中,所述转动电机的外部安装设置有固定架,所述主转动轮的外部转动设置有皮带结构,所述皮带结构的顶部内侧转动设置有从转动轮,且所述皮带结构的外部表面等分紧固安装设置有连接杆,所述连接杆的侧端紧固连接有放置盘,其中,所述放置盘的表面上可放置有灭火球。
优选的,所述传动调节组件包括两组基板,两组所述基板的侧端滑动连接有滑动架,且两组所述基板的顶壁表面上均安装设置有两组电动推杆,两组所述电动推杆顶部通过固定块紧固连接有导轨槽座,所述导轨槽座的外壁表面架设安装有步进电机,所述步进电机的内部输出轴端外部安装有滚珠丝杆,所述滚珠丝杆的侧端设置有轴承座,且所述步进电机的外部周侧安装的连接架两端设置有两根导柱,两根所述导柱的外部周侧滑动套设安装有套环,所述套环的侧端通过短横杆紧固连接有传动滑座,所述传动滑座的顶部两端紧固安装有磁吸基座块,当无人机(即大疆无人机)在救援人员远程操作起飞进行救援作业后,从投放口降落至磁吸基座块上,且无人机的两侧机翼收起,避免发生碰撞,之后利用控制处理器发送控制信号使得步进电机进行启动,在步进电机启动带动下,使得传动滑座在滚珠丝杆、轴承座、套环、两根导柱外部进行位移作业,从而使得对接端和斜槽输送管进行嵌合对接,便于利用转动输送组件使得灭火球输送至无人机内置腔室中为下次救援作业进行准备。
优选的,所述导柱和所述滚珠丝杆的侧端两侧紧固连接有两组燕尾滑块,两组所述燕尾滑块的侧端设置连接有双燕尾滑槽竖座,所述双燕尾滑槽竖座的表面上开设有两组燕尾竖滑槽,且两组所述燕尾竖滑槽和两组所述燕尾滑块滑动连接,所述双燕尾滑槽竖座的底端紧固安装有支撑安装座,当带动无人机位移至预设位置后,利用燕尾滑块带动导轨槽座、导柱、滚珠丝杆、传动滑座和无人机在双燕尾滑槽竖座、两组燕尾竖滑槽和滑动架配合下,进行位置下降至和斜槽输送管对接平行的预设位置。
优选的,所述救援灭火设备组件包括侧挡板,所述侧挡板的边侧表壁焊接有放置卡座,所述放置卡座的内部设置有旋转电机,所述旋转电机的内部输出轴端外部安装有阻尼转轴座,所述阻尼转轴座的表面外壁周侧铰接有电动伸缩杆,所述电动伸缩杆的顶端通过衔接块紧固连接有消防设备,所述消防设备的内部设置有压力传感器,当救援人员至整体装置方位5米处,无线射频芯片组感应并识别救援人员本身所携带的智能芯片,接着将信号输送至控制处理器进行判断后,控制处理器发送信号至旋转电机和第二电动推柱,使得第二电动推柱启动后,旋转电机同步在阻尼转轴座转动作用下带动电动伸缩杆进行角度旋转,且电动伸缩杆进行伸缩,使得消防设备(即灭火器)进行投放出,减少救援人员开锁时间,保障救援作业的最佳救援时机。
优选的,所述无人机的背侧表面开设有对接端,且所述对接端和所述斜槽输送管嵌合连接,所述无人机的顶端内部安装设置有高清摄像头,所述无人机的底部设置有降落磁性机架,且所述降落磁性机架和磁吸基座块磁性连接,当救援人员进行救援作业前,可分配一位救援人员先远程操作无人机进行救援作业,当无人机内部的灭火球使用完后,可继续操控无人机,利用所安装的扩音器对受灾人员进行疏散引导,便于在第一时间对险情实施救援。
优选的,所述无人机的底部表面设置有舱口,其中,所述舱口通过设置的电动阀进行控制启闭,利用对电动阀的启闭进行远程操控,当操控无人机达到救援位置上方后,电动阀启动,使得舱口开启,对火险进投掷灭火球进行第一时间的救援灭火作业。
优选的,所述顶舱的内壁表面紧固安装有两组第一电动推柱,两组所述第一电动推柱通过设置的第一转柱铰接有顶锁合盖板,利用控制处理器提前在无人机进行起飞前,向第一电动推柱发生控制信号进行启动,使得顶锁合盖板进行开启,当操控无人机飞出进行救援作业后,顶锁合盖板进行闭合。
优选的,所述安放柜的前端通过预设的安装板设置有两组第二电动推柱,两组所述第二电动推柱通过设置的第二转柱铰接有锁合柜门,利用控制处理器在无线射频芯片组配合下,提前向第二电动推柱发送控制信号进行启动,从而带动锁合柜门进行开启,进一步减少救援人员在救援期间段所需花费的时间。
优选的,所述机体的两侧表面设置有凸舱壳体,所述凸舱壳体和所述机体形成适合所述无人机停滞的空间,通过设置的凸舱壳体,便于不会阻碍无人机的起降作业。
优选的,所述机体的两侧外表面安装设置有信号放大器,所述机体的底部焊接设置有多组安装底座,所述安装底座通过紧固螺栓和放置平面进行紧固安装,利用信号放大器,便于在远程对无人机进行操控时,不会因附近基站信号干扰造成操作失误,且利用多组安装底座将机体整体结构进行紧固放置后,可以根据无人机的操控距离范围来使得整体装置进行定点安装放置,最大限度的覆盖所需使用环境。
与现有技术相比,本发明的有益效果是:
1、本发明中,通过在转动输送组件组件、无人机、无线射频芯片组和GPRS装置配合下,可以根据无人机的操控距离范围来使得整体装置进行定点安装放置,最大限度的覆盖所需城市使用环境,接着当遇到险情时,通过所设置的GPRS装置与通信基站发生信号波交互,进行实时定位所发生险情的位置,且发送救援信号至救援人员,当救援人员接收到救援信息时,可以指派一名救援人员,远程在GPRS装置和信号放大器配合下对控制处理器发送操作指令后,操控无人机到达发生险情位置上方时,救援人员利用对电动阀的启闭进行远程操控,当操控无人机达到救援位置上方后,电动阀启动,使得舱口开启,对火险投掷灭火球进行第一时间的救援灭火作业。
2、本发明中,通过在转动输送组件组件配合下,当操控无人机救援作业前,利用控制处理器分别向转动电机、小型电动伸缩杆和微型负压泵发送控制指令,使得转动电机转动的同时带动主转动轮、皮带结构和从转动轮在后舱室内部进行运转,同步使得放置盘的表面上可放置有灭火球进行逐步抬升,当抬升至预设位置后,自动旋转轴座收到信号,在角度传感器配合下带动小型电动伸缩杆、微型负压泵和负压真空吸盘进行角度调节,接着小型电动伸缩杆带动微型负压泵和负压真空吸盘向灭火球进行延展,当接触灭火球后,利用微型负压泵,使得负压真空吸盘对灭火球进行吸附后,自动旋转轴座再次转动调节,同时小型电动伸缩杆收缩,使得负压真空吸盘所吸附的灭火球放置入斜槽输送管后,灭火球顺着斜槽输送管从对接端输送至无人机内置腔室中,为下次救援作业进行准备,提高救援效率。
3、本发明中,通过在救援灭火设备组件和无线射频芯片组配合下,当救援人员至整体装置方位5米处,无线射频芯片组感应并识别救援人员本身所携带的智能芯片,接着将信号输送至控制处理器进行判断后,控制处理器发送信号至旋转电机和第二电动推柱,使得第二电动推柱启动后,从而带动锁合柜门进行开启,且旋转电机同步在阻尼转轴座转动作用下带动电动伸缩杆进行角度旋转,且电动伸缩杆进行伸缩,使得消防设备进行投放出,减少救援人员开锁时间,保障救援作业的最佳救援时机,且当救援人员将消防设备放回后,在阻尼转轴座、旋转电机和电动伸缩杆配合下将消防设备带回到初始位置,使得消防设备内部的阀门开启和补充管相连接后,在压力传感器配合下,对消防设备内部进行检测反馈,当消防设备内部余量不足后,使得储气罐对消防设备进行补充。
附图说明
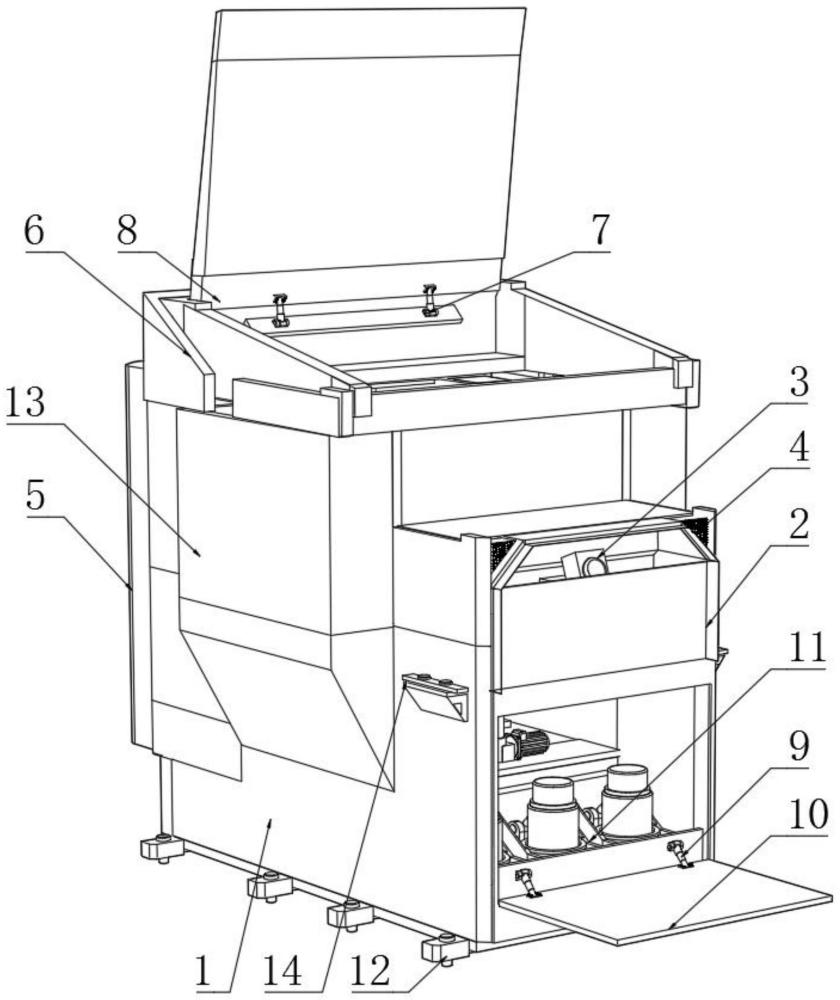
图1为本发明一种智慧应急管理装置中主视的结构示意图;
图2为本发明一种智慧应急管理装置中正视的结构示意图;
图3为本发明一种智慧应急管理装置中整体结构内部分离的示意图;
图4为本发明一种智慧应急管理装置中整体结构分离的示意图;
图5为本发明一种智慧应急管理装置中无人机仰视的结构示意图;
图6为本发明一种智慧应急管理装置中整体结构内部剖视的示意图;
图7为本发明一种智慧应急管理装置中转动输送组件的结构示意图;
图8为本发明一种智慧应急管理装置中救援灭火设备组件的结构示意图;
图9为本发明一种智慧应急管理装置中传动调节组件的结构示意图。
图中:1、机体;2、前舱室;3、GPRS装置;4、语音播报器;5、后舱室;6、顶舱;7、第一电动推柱;8、顶锁合盖板;9、第二电动推柱;10、锁合柜门;11、救援灭火设备组件;110、侧挡板;111、放置卡座;112、旋转电机;113、阻尼转轴座;114、电动伸缩杆;115、消防设备;12、安装底座;13、凸舱壳体;14、信号放大器;15、传动调节组件;150、基板;151、电动推杆;152、导轨槽座;153、步进电机;154、导柱;155、滚珠丝杆;156、轴承座;157、传动滑座;158、磁吸基座块;159、燕尾滑块;1590、双燕尾滑槽竖座;1591、燕尾竖滑槽;1592、支撑安装座;16、无人机;17、对接端;18、高清摄像头;19、降落磁性机架;20、投放口;21、舱口;22、补充管;23、储气罐;24、锂电池组;25、控制处理器;26、转动输送组件;260、转动电机;261、主转动轮;262、固定架;263、皮带结构;264、从转动轮;265、连接杆;266、放置盘;27、自动旋转轴座;28、小型电动伸缩杆;29、负压真空吸盘;30、斜槽输送管;31、滑动架。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施条例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-图9所示,本发明提供一种技术方案:一种智慧应急管理装置,包括机体1,机体1的前端一体成型设置有前舱室2和安放柜,安放柜内部安装设置有三组救援灭火设备组件11,三组救援灭火设备组件11的底部设置有相对应三根补充管22,三根补充管22的侧端连通设置有储气罐23,且机体1的底壁表面上分别安装设置有锂电池组24和控制处理器25,前舱室2的内部安装设置有GPRS装置3,前舱室2的左右两侧设置安装有语音播报器4,且前舱室2的内部安装设置有无线射频芯片组,机体1的顶部紧固连接有顶舱6,机体1的内部安装设置有传动调节组件15,传动调节组件15的上方设置有无人机16。其中,顶舱6有供无人机16升降的起落口端,机体1的后端一体成型有后舱室5,后舱室5的顶壁表面开设有投放口20,后舱室5的内部顶端安装设置有转动输送组件26,且后舱室5的内部顶壁表面紧固安装有自动旋转轴座27,自动旋转轴座27的表面上安装设置有角度传感器,且自动旋转轴座27的底部设置安装有小型电动伸缩杆28,小型电动伸缩杆28的底部紧固连接有微型负压泵,微型负压泵的内部底端安装设置有负压真空吸盘29,且后舱室5的侧壁表面开设有斜槽输送管30。转动输送组件26包括转动电机260,转动电机260的内部输出轴端外部安装有主转动轮261,其中,转动电机260的外部安装设置有固定架262,主转动轮261的外部转动设置有皮带结构263,皮带结构263的顶部内侧转动设置有从转动轮264,且皮带结构263的外部表面等分紧固安装设置有连接杆265,连接杆265的侧端紧固连接有放置盘266,其中,放置盘266的表面上可放置有灭火球。
根据图2、图3、图4、图6和图9所示,传动调节组件15包括两组基板150,两组基板150的侧端滑动连接有滑动架31,且两组基板150的顶壁表面上均安装设置有两组电动推杆151,两组电动推杆151顶部通过固定块紧固连接有导轨槽座152,导轨槽座152的外壁表面架设安装有步进电机153,步进电机153的内部输出轴端外部安装有滚珠丝杆155,滚珠丝杆155的侧端设置有轴承座156,且步进电机153的外部周侧安装的连接架两端设置有两根导柱154,两根导柱154的外部周侧滑动套设安装有套环,套环的侧端通过短横杆紧固连接有传动滑座157,传动滑座157的顶部两端紧固安装有磁吸基座块158。当无人机16(即大疆无人机)在救援人员远程操作起飞进行救援作业后,从投放口20降落至磁吸基座块158上,且无人机16的两侧机翼收起,避免发生碰撞,之后利用控制处理器25发送控制信号使得步进电机153进行启动,在步进电机153启动带动下,使得传动滑座157在滚珠丝杆155、轴承座156、套环、两根导柱154外部进行位移作业,从而使得对接端17和斜槽输送管30进行嵌合对接,便于利用转动输送组件26使得灭火球输送至无人机16内置腔室中为下次救援作业进行准备。
根据图2、图3、图4、图6和图9所示,导柱154和滚珠丝杆155的侧端两侧紧固连接有两组燕尾滑块159,两组燕尾滑块159的侧端设置连接有双燕尾滑槽竖座1590,双燕尾滑槽竖座1590的表面上开设有两组燕尾竖滑槽1591,且两组燕尾竖滑槽1591和两组燕尾滑块159滑动连接,双燕尾滑槽竖座1590的底端紧固安装有支撑安装座1592。当带动无人机16位移至预设位置后,利用燕尾滑块159带动导轨槽座152、导柱154、滚珠丝杆155、传动滑座157和无人机16在双燕尾滑槽竖座1590、两组燕尾竖滑槽1591和滑动架31配合下,进行位置下降至和斜槽输送管30对接平行的预设位置。
根据图1、图2、图4和图8所示,救援灭火设备组件11包括侧挡板110,侧挡板110的边侧表壁焊接有放置卡座111,放置卡座111的内部设置有旋转电机112,旋转电机112的内部输出轴端外部安装有阻尼转轴座113,阻尼转轴座113的表面外壁周侧铰接有电动伸缩杆114,电动伸缩杆114的顶端通过衔接块紧固连接有消防设备115,消防设备115的内部设置有压力传感器。
当救援人员至整体装置方位5米处,无线射频芯片组感应并识别救援人员本身所携带的智能芯片,接着将信号输送至控制处理器25进行判断后,控制处理器25发送信号至旋转电机112和第二电动推柱9,使得第二电动推柱9启动后,旋转电机112同步在阻尼转轴座113转动作用下带动电动伸缩杆114进行角度旋转,且电动伸缩杆114进行伸缩,使得消防设备115(即灭火器)进行投放出,减少救援人员开锁时间,保障救援作业的最佳救援时机。
根据图3、图4和图5所示,无人机16的背侧表面开设有对接端17,且对接端17和斜槽输送管30嵌合连接,无人机16的顶端内部安装设置有高清摄像头18,无人机16的底部设置有降落磁性机架19,且降落磁性机架19和磁吸基座块158磁性连接,当救援人员进行救援作业前,可分配一位救援人员先远程操作无人机16进行救援作业,当无人机16内部的灭火球使用完后,可继续操控无人机16,利用所安装的扩音器对受灾人员进行疏散引导,便于在第一时间对险情实施救援。
根据图3、图4和图5所示,无人机16的底部表面设置有舱口21,其中,舱口21通过设置的电动阀进行控制启闭,利用对电动阀的启闭进行远程操控,当操控无人机16达到救援位置上方后,电动阀启动,使得舱口21开启,对火险投掷灭火球进行第一时间的救援灭火作业。
根据图1、图2、图3和图4所示,顶舱6的内壁表面紧固安装有两组第一电动推柱7,两组第一电动推柱7通过设置的第一转柱铰接有顶锁合盖板8,利用控制处理器25提前在无人机16进行起飞前,向第一电动推柱7发生控制信号进行启动,使得顶锁合盖板8进行开启,当操控无人机16飞出进行救援作业后,顶锁合盖板8进行闭合。
根据图1、图2、图4和图6所示,安放柜的前端通过预设的安装板设置有两组第二电动推柱9,两组第二电动推柱9通过设置的第二转柱铰接有锁合柜门10,利用控制处理器25在无线射频芯片组配合下,提前向第二电动推柱9发送控制信号进行启动,从而带动锁合柜门10进行开启,进一步减少救援人员在救援期间段所需花费的时间。
根据图1和图2所示,机体1的两侧表面设置有凸舱壳体13,凸舱壳体13和机体1形成适合无人机16停滞的空间,通过设置的凸舱壳体13,便于不会阻碍无人机16的起降作业。
根据图1-图5所示,机体1的两侧外表面安装设置有信号放大器14,机体1的底部焊接设置有多组安装底座12,安装底座12通过紧固螺栓和放置平面进行紧固安装,利用信号放大器14,便于在远程对无人机16进行操控时,不会因附近基站信号干扰造成操作失误,且利用多组安装底座12将机体1整体结构进行紧固放置后,可以根据无人机16的操控距离范围来使得整体装置进行定点安装放置,最大限度的覆盖所需使用环境。
本发明中的GPRS装置3、信号放大器14、无线射频芯片组、控制处理器25、压力传感器和角度传感器的接线图属于本领域的公知常识,其工作原理是已经公知的技术,其型号根据实际使用选择合适的型号,所以对GPRS装置3、信号放大器14、无线射频芯片组、控制处理器25、压力传感器和角度传感器不再详细解释控制方式和接线布置。
本装置的使用方法及工作原理:首先可以根据无人机16的操控距离范围来使得整体装置进行定点安装放置,最大限度的覆盖所需城市使用环境,接着当遇到险情时,通过所设置的GPRS装置3与通信基站发生信号波交互,进行实时定位所发生险情的位置,且发送救援信号至救援人员。当救援人员接收到救援信息时,可以指派一名救援人员,远程在GPRS装置3和信号放大器14配合下对控制处理器25发送操作指令后,利用控制处理器25,向第一电动推柱7发生控制信号进行启动,使得顶锁合盖板8进行开启。当操控无人机16飞出进行救援作业后,顶锁合盖板8进行闭合,且在操控无人机16救援作业前,利用控制处理器25分别向转动电机260、小型电动伸缩杆28和微型负压泵发送控制指令,使得转动电机260转动的同时带动主转动轮261、皮带结构263和从转动轮264在后舱室5内部进行运转,同步使得放置盘266的表面上可放置有灭火球进行逐步抬升。
当抬升至预设位置后,自动旋转轴座27收到信号,在角度传感器配合下带动小型电动伸缩杆28、微型负压泵和负压真空吸盘29进行角度调节,接着小型电动伸缩杆28带动微型负压泵和负压真空吸盘29向灭火球进行延展,当接触灭火球后,利用微型负压泵,使得负压真空吸盘29对灭火球进行吸附后,自动旋转轴座27再次转动调节,同时小型电动伸缩杆28收缩,使得负压真空吸盘29所吸附的灭火球放置入斜槽输送管30后,灭火球顺着斜槽输送管30从对接端17输送至无人机16内置腔室中,之后救援人员可远程操作无人机16升起进行救援作业。当操控无人机16到达发生险情位置上方时,救援人员利用对电动阀的启闭进行远程操控,当操控无人机16达到救援位置上方后,电动阀启动,使得舱口21开启,对火险投掷灭火球进行第一时间的救援灭火作业,接着当无人机16内部的灭火球使用完后,可选择继续操控无人机16,利用所安装的扩音器对受灾人员进行疏散引导,便于在第一时间对险情实施救援,或者操控无人机16回航后,补充灭火球后,继续进行救援工作。之后,使得其他救援人员按照GPRS装置3所定位前往后,当救援人员至整体装置方位5米处,无线射频芯片组感应并识别救援人员本身所携带的智能芯片,接着将信号输送至控制处理器25进行判断后,控制处理器25发送信号至旋转电机112和第二电动推柱9,使得第二电动推柱9启动后,从而带动锁合柜门10进行开启,且旋转电机112同步在阻尼转轴座113转动作用下带动电动伸缩杆114进行角度旋转,且电动伸缩杆114进行伸缩,使得消防设备115(即灭火器)进行投放出,减少救援人员开锁时间,保障救援作业的最佳救援时机。当无人机16(即大疆无人机)在救援人员操作下反航后,从投放口20降落至磁吸基座块158上,且无人机16的两侧机翼收起,避免发生碰撞,之后利用控制处理器25发送控制信号使得步进电机153进行启动。在步进电机153启动带动下,使得传动滑座157在滚珠丝杆155、轴承座156、套环、两根导柱154外部进行位移作业。接着当带动无人机16位移至预设位置后,利用燕尾滑块159带动导轨槽座152、导柱154、滚珠丝杆155、传动滑座157和无人机16在双燕尾滑槽竖座1590、两组燕尾竖滑槽1591和滑动架31配合下,进行位置下降至和斜槽输送管30对接平行的预设位置,从而使得对接端17和斜槽输送管30进行嵌合对接,便于利用转动输送组件26使得灭火球输送至无人机16内置腔室中为下次救援作业进行准备,且当救援人员将消防设备115放回后,在阻尼转轴座113、旋转电机112和电动伸缩杆114配合下将消防设备115带回到初始位置,使得消防设备115内部的阀门开启和补充管22相连接后,在压力传感器配合下,对消防设备115内部进行检测反馈,当消防设备115内部余量不足后,使得储气罐23对消防设备115进行补充。
尽管参照前述实施例对本发明进行了详细的说明,多余本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。