一种用于拾球机器人的乒乓球拾取装置及乒乓球拾取方法
文献发布时间:2023-06-19 09:23:00
技术领域
本发明是属于体育运动器械技术领域,具体涉及一种用于拾球机器人的乒乓球拾取装置及乒乓球拾取方法。
背景技术
乒乓球是一项非常普及的体育项目。在乒乓球训练过程中,大量的乒乓球散落地面,这时将大量散落的乒乓球收集起来成了一个艰巨的任务。目前已经存在很多种乒乓球拾取机器人,其中采用的拾球方式包括机械手式拾取,气缸吸取式拾取等,但是这些拾取方式存在结构不够精巧,性价比不高,拾球效率低,安全稳定性差等问题,并不能较好的满足乒乓球拾取需求。
在现有的技术中,实用新型专利乒乓球拾取装置,申请号CN201821178905.8,授权公告号CN208660270U,授权公告日2019.03.29。装置包括底部带有万向轮的支撑架,支撑架上架设气缸,气缸和拾球盒相连。通过气缸带动拾球盒上下运动,拾球盒底部的弹性条因为乒乓球撑开将乒乓球拾取。该装置也需要人工操作,自动化程度不高。
实用新型专利一种智能乒乓球拾取装置,申请号CN201820145296.X,授权公告号CN207886611U,授权公告日2018.09.21。该装置通过影像传感器确定乒乓球的位置,装置运动到乒乓球位置后使用吸气管将乒乓球球吸入储球箱。但该装置每次只能拾取一个球,效率低下,且该装置通过吸气管收集乒乓球,可能会将一些比乒乓球质量轻的杂物和垃圾收集进去,例如地上的纸屑,灰层等,带来了额外的分拣任务。
发明专利一种全自动乒乓球拾取车,申请号CN201711334559.8,授权公告号CN108031082B,授权公告日2019.09.10。该发明包括安装在车体上的拾球组件、运球组件、收集组件、超声波避障传感器以及驱动组件装置。但拾球组件和运球组件结构复杂,使得机器制造成本偏高,效率低下。
一种基于机器视觉的乒乓球拾取移动机器人及控制方法,申请号CN201811253670.9,公开号CN109333549A,公开日2019-02-15。该专利将待拾取发现的乒乓球坐标发送给机械手臂控制模块,通过机械手臂控制模块,用于进行拾球动作,并将球放置在储球模块中;电源模块,用于供电;储球模块,用于储存拾取的乒乓球。该装置采用的机械手拾球需要极高的定位准确度,且只能进行单球拾取,对定位等其他模块要求高,拾球效率较低。
发明内容
本发明是为了克服先有技术不足,依托于乒乓球拾取机器人,提供了一种用于拾球机器人的乒乓球拾取装置及乒乓球拾取方法。
本发明的技术方案如下:
本发明提供的一种用于拾球机器人的乒乓球拾取装置,包括底板、舵机、凸轮、滚轮、拾球筐、限位导轨、滑块和弹性线。拾球筐相对的其中两侧上安装有滑块,滑块能沿安装于底板上的限位导轨滑动,底板上开有能使拾球筐运动的通道,拾球筐相对的另外两侧上安装有可转动的滚轮,滚轮和凸轮滑动接触,凸轮可由安装在底板上的舵机驱动转动,拾球筐的底部两侧安装有多条并排的弹性线,相邻两条弹性线的间距小于乒乓球的直径。
所述乒乓球拾取装置通过凸轮和滑块机构带动拾球筐上下运动。在拾球筐向下运动过程中,乒乓球在压力的作用下会自动将相邻的两根弹性线撑开从而挤入拾球筐;在拾球筐向上运动过程中,由于乒乓球较轻,弹性线弹性较小,弹性线之间缝隙小于乒乓球直径,乒乓球随拾球筐一起向上运行,从而完成对乒乓球的拾取工作。
本发明还为该拾球装置专门设计了一种用于拾球机器人的乒乓球拾取方法:拾球机器人原地旋转运动加上拾球筐5同步下降运动,使得拾球筐5相对于乒乓球20所处的地面呈现螺旋下降轨迹,拾球筐下落到一定程度后,弹性线与乒乓球接触,拾球筐的螺旋下降会不断改变弹性线和乒乓球的相对接触位置,迫使乒乓球自动从相邻两条弹性线的空隙中挤入拾球筐,完成乒乓球拾取。该方法可以有效解决拾球筐下落时某根弹性线恰好处于乒乓球正上方(尤其在多球拾取过程中)附近,从而导致乒乓球拾取失败问题。
本发明相比现有技术的有益效果是:
1、本发明的乒乓球拾取装置通过舵机驱动凸轮及滚轮,滑块被限位导轨约束使拾球筐上下运动,机械结构简单,安全稳定,性价比高。乒乓球拾取过程中,只要散落在地上的乒乓球位于拾球筐下即可,不需要知道乒乓球精确位置。
2、本发明设计了“螺旋下降拾球法”的拾球控制方法,解决了拾球筐在下落过程因卡球进而导致的拾球失败问题,实验表明比普通拾球的成功率提高了30%,提高了拾球的可靠性和拾球效率。
附图说明
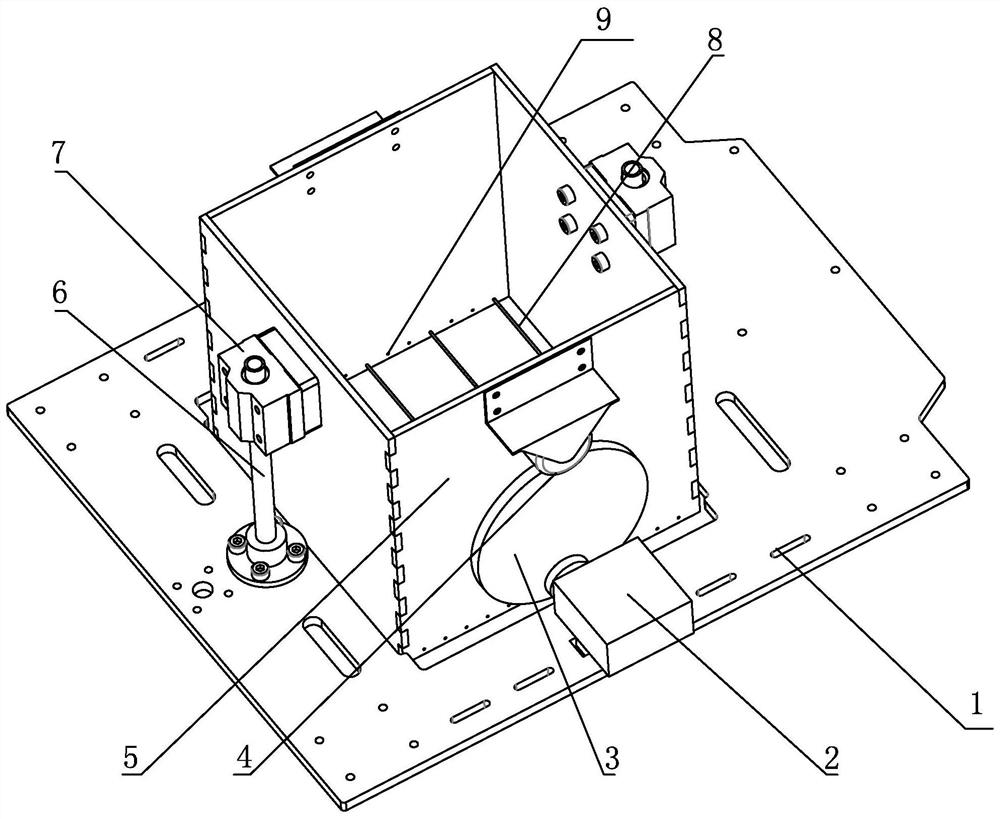
图1为本发明的乒乓球拾取装置的立体图;
图2为拾球筐处于最高位置图;
图3为拾球筐处于最低位置拾球状态图;
图4为乒乓球被拾球筐拾取状态图;
图5为拾球机器人的立体图;
图6为拾球机器人的背面图。
具体实施方式
1、关于乒乓球拾取装置:
如图1所示,一种乒乓球拾取装置,它包括底板1、舵机2、凸轮3、滚轮4、拾球筐5、限位导轨6、滑块7和弹性线8;拾球筐5相对的其中两侧上安装有滑块7,滑块7能沿限位6滑动,移动平台10上开有能使拾球筐5运动的通道,拾球筐5相对的另外两侧上安装有可转动的滚轮4,滚轮4和凸轮3滑动接触,凸轮3可由舵机2驱动转动,拾球筐5的底部两侧安装有多条并排的弹性线8,相邻两条弹性线8的间距小于乒乓球的直径。
所述拾球筐5的底部两侧有均匀开出的两排定位孔9,用于安装弹性线8;
所述安装在定位孔9内的弹性线8位置可调。如此设置,调节弹性线间距离,以便达到最优的拾取效果。
所述弹性线8有较小弹性,可选为碳素线。
所述乒乓球拾取装置通过凸轮3和滑块7带动拾球筐5上下运动。在拾球筐5向下运动过程中,乒乓球在压力的作用下会自动将相邻的两根碳素线撑开从而挤入拾球筐5;在拾球筐5向上运动过程中,由于乒乓球较轻,碳素线弹性较小,碳素线之间缝隙小于乒乓球直径,乒乓球随拾球筐一起向上运行,从而完成对乒乓球的拾取工作。
该乒乓球拾取装置能够完成单个或多个乒乓球的拾取任务,缩短了拾球时间和复杂程度,提高了乒乓球拾取的效率,结构简单,且不存在安全性问题,比起现有的人工或自动的乒乓球拾取装置具有明显的优势。可以安装在乒乓球自动拾取机器人、人工乒乓球拾取车等乒乓球拾取设备上,实现乒乓球高效拾取。
2、关于乒乓球拾取过程:
如图2-图4所示,乒乓球拾取装置在一个乒乓球拾取周期内共分为三个阶段:
下降阶段:当发现乒乓球20位于拾球筐5下方时,舵机2带动凸轮3顺时针(从凸轮方向看)转动,由于重力作用,拾球筐5从最高点开始下降,由图2所示位置向图3所示位置变化;
停止阶段:舵机旋转至一定角度后,拾球筐5靠近地面,在拾球筐5重力作用下,乒乓球20挤过碳素线间空隙,拾球筐完成对乒乓球20的拾取,停在图3所示位置;
上升阶段:当乒乓球20拾取完成后,舵机2带动凸轮3逆时针(从凸轮方向看)转动,拾球筐5在凸轮3转动的作用下,拾球筐5上升到最高点,由图3所示位置到达图4所示位置。之后在每次需要拾球操作时,乒乓球拾取装置将重复上述阶段。
3、关于拾球机器人:
如图5-图6所示,将乒乓球拾取装置应用到拾球机器人上,它包括移动平台10、补光灯11、摄像头12、超声波测距模块13、电源模块14、控制模块15、侧边导轮16、围板17、导球板18和所述的乒乓球拾取装置19。
移动平台10采用四轮直流电机驱动;围板17布置在拾球筐5的正下方,围板17固定在移动平台10的下表面上,围板17一侧具有乒乓球入口,位于所述乒乓球入口上方的移动平台10的上表面上安装有用于检测乒乓球的摄像头12和用于避障的超声波测距模块13,平台10上还安装有电源模块14、以及用于控制舵机2和移动平台10的控制模块15,摄像头12和超声波测距模块13的信号输出端分别与控制模块15的信号输入端电连接,电源模块12为舵机2、移动平台10、摄像头12、超声波测距模块13和控制模块15供电。
位于所述乒乓球入口处的移动平台10的下表面上安装有两个导球板18,两个导球板18呈喇叭形布置。围板17可选用U型挡板。导球板18则引导乒乓球进入U型挡板内。另外还设计侧边导轮16,所述拾球机器人还包括侧边导轮16,侧边导轮16可转动的设置在移动平台10的上表面的四个角处。设置侧边导轮16是为防止移动平台10移动时侧面碰撞并辅助移动平台10转向。
位于所述乒乓球入口上方的移动平台10的上表面上安装有补光灯11。通过补光灯11补光来提高摄像头12识别乒乓球的准确率。摄像头12实时检测乒乓球的位置和距离,超声波测距模块13检测机器人前方是否有障碍物,两者将信息传输给控制模块15,然后控制模块15控制移动平台10能够躲避障碍物并实时调整拾球机器人的方向,使拾球机器人正对着乒乓球方向移动,乒乓球20通过导球板18进入U型挡板内,最后控制模块15控制乒乓球拾取装置和移动平台10采用“边旋转边拾球”的方法拾取U型挡板内的乒乓球。
4、关于“螺旋下降拾球法”:
另外一个具体实施方式是提供一种用于拾球机器人的乒乓球拾取方法,它包括以下步骤:
步骤S1:控制模块15控制移动平台10原地旋转,摄像头12检测移动平台10周围是否存在乒乓球;
步骤S2:若摄像头12检测到乒乓球,进入步骤S3,若移动平台10旋转角度达到预设角度,进入步骤S6;
步骤S3:摄像头12将目标乒乓球的坐标和距离信息实时发送给控制模块15,控制模块15根据这些信息控制移动平台10向目标乒乓球运动,使得目标乒乓球由乒乓球入口进入围挡板17内,进入步骤S4;
若移动平台10移动期间超声波测距模块13检测到前方有障碍物,将信息发送给控制模块15,进入步骤S1;
步骤S4:边自旋边拾球的“螺旋下降拾球法”:
拾球筐5下降,控制模块15控制舵机带动凸轮3进行转动,凸轮3与滚轮4接触,控制拾球筐5沿限位导轨6从最高点开始下降运动,同时,移动平台10原地旋转,
拾球筐5停止运动,舵机2旋转一定角度后,拾球筐5靠近地面,在拾球筐5的重力作用下,乒乓球挤过弹性线8之间的空隙,完成对乒乓球的拾取;
拾球筐5向上运动,当乒乓球拾取完成后,舵机带动凸轮3反向转动,拾球筐5在凸轮3转动的作用下沿限位导轨6向上运动,同时,移动平台10原地反向旋转,拾球筐5上升到最高点;之后在每次拾球机器人需要拾球操作时,乒乓球拾取装置将重复上述过程;
步骤S5:移动平台10旋转角度置零,进入步骤S1;
步骤S6:移动平台10向前移动,移动距离为预设距离,若移动期间超声波测距模块13检测到前方有障碍物,将信息发送给控制模块15,控制移动平台10停止移动,进入步骤S1,如此重复上述,完成乒乓球拾取。
步骤S4中采用“螺旋下降拾球法”:即拾球筐5下落过程中,移动平台10顺时针(从上往下看)原地旋转,拾球筐5相对于乒乓球20所处的地面呈现螺旋下降状态,拾球筐5下落到一定程度后,碳素线与乒乓球20接触,拾球筐5的螺旋下降会不断改变碳素线和乒乓球20的相对接触位置,迫使乒乓球20自动从相邻两条碳素线的空隙中挤入拾球筐,提高了拾球可靠性。拾球筐5上升过程中,移动平台10逆时针(从下往上看)原地旋转,在拾球前后,移动平台10的方位不变。
本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,均仍属本发明技术方案范围。
- 一种用于拾球机器人的乒乓球拾取装置及乒乓球拾取方法
- 一种乒乓球训练场用乒乓球拾取装置