一种水下航行器操稳性因果分析方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明属于航行器设计技术领域,具体涉及一种因果分析方法。
背景技术
自主水下航行器(Autonomous Underwater Vehicle,AUV)是能够自主航行执行海洋探测、海上搜救、区域警戒等任务的水下机器人。近年来,由于全球对海洋资源探测和开发要求的日益紧迫、对海洋领域安全的日益重视,AUV因为自主性强、隐蔽性高以及适应能力强等优点,受到了越来越多的关注,相关领域的研究也越来越丰富。作为一个复杂的工程系统,AUV的总体性能往往涉及众多学科的知识,例如航行器外形、流体动力、壳体结构、能量、质量布局、推进器、操稳性等,总体设计工作中需要综合考虑这些学科,实现整体性能最佳。
AUV总体设计涉及的众多学科并不是相互独立且完全黑箱,学科之间可能会存在一些经验公式,这些经验公式经过大量实验证明,高效且简洁。传统的设计方法通常将各学科公式统一起来,从外形变量直接研究最终升阻比,这种方法往往忽略了变量与变量、变量与中间变量的关系,导致内部结构不明或优化效果缓慢。因此对水下航行器优化的内部因果关系进行分析有着重要的意义。
正是因为AUV总体设计学科之间往往存在复杂的数据耦合关系,单一学科的设计结果可能影响其他学科,甚至导致其他学科设计结果不可行。多学科设计优化(MDO)在其中得到了广泛的应用,而复杂系统往往是高维问题。当维数增加时,优化搜索空间呈指数增长,使得在广阔的空间中进行采样变得棘手。采用高保真度的代理模型,可大大提高求解最优解的计算成本。因此,降低问题的维度是解决这一挑战的自然策略。
在近几十年的研究中,发展出了不同的分解策略,包括当前子空间优化(CSSO)、协同优化(CO)和二层集成系统综合(BLISS)。这些方法已经被用于许多不同的工程应用并取得了一定的效果。随着降维分析技术的发展,许多算法和策略都可以实现对复杂问题甚至是高维贵重黑箱问题进行有效的降维。但是在这些方法中的函数调用数量仍然很大,当问题结构较为复杂时需要耗费大量的计算资源,这会导致优化成本增加和设计周期的加长。
因果图降维方法是近年来发展起来的一种可以有效的解决优化效率和资源利用的方法。主要思想是利用一张完整的变量因果关系图来描述所研究的问题,并由关系图进行因果分析求解,得到耦合关系的重要度并对问题进行拆分,划分为一级优化问题和二级优化问题。通常来说,只要存在白箱的问题公式以及耦合回路的出现,都可以利用该分析方法用以辅助对问题内部的了解及指导问题降维或优化方向。因果图方法的特点是利用大量的经验公式分析结果来辅助高精度分析结果进行优化,从而使得整个设计优化过程的总的计算量得到减少。
发明内容
为了克服现有技术的不足,本发明提供了一种水下航行器操稳性因果分析方法,首先根据变量间的单调影响原则,构造一个基于因果关系的因果图;由因果图得到输入输出关系矩阵和单调影响关系矩阵,对两个矩阵进行变换,将输入变量分为无矛盾变量和矛盾变量,完成第一阶段降维;采用Sobol GSA方法计算因果图中每两个节点之间连接的权重,将权重与阈值进行比较,得到新的因果图,再根据新的因果图把矛盾变量分为重要矛盾变量和非重要矛盾变量,完成第二阶段降维。本发明针对目前现有水下航行器主成分分析方法的缺点,提高了设计优化的逻辑与效率。同时也适用于水下航行器其余学科的优化设计,使用范围广泛。
本发明解决其技术问题所采用的技术方案包括以下步骤:
步骤1:水下航行器操稳性分析的变量包括输入变量、中间变量和输出变量;定义输入变量集为X={x
步骤2:基于详细定义范围下的变量间的单调影响原则,构造一个基于因果关系的因果图;
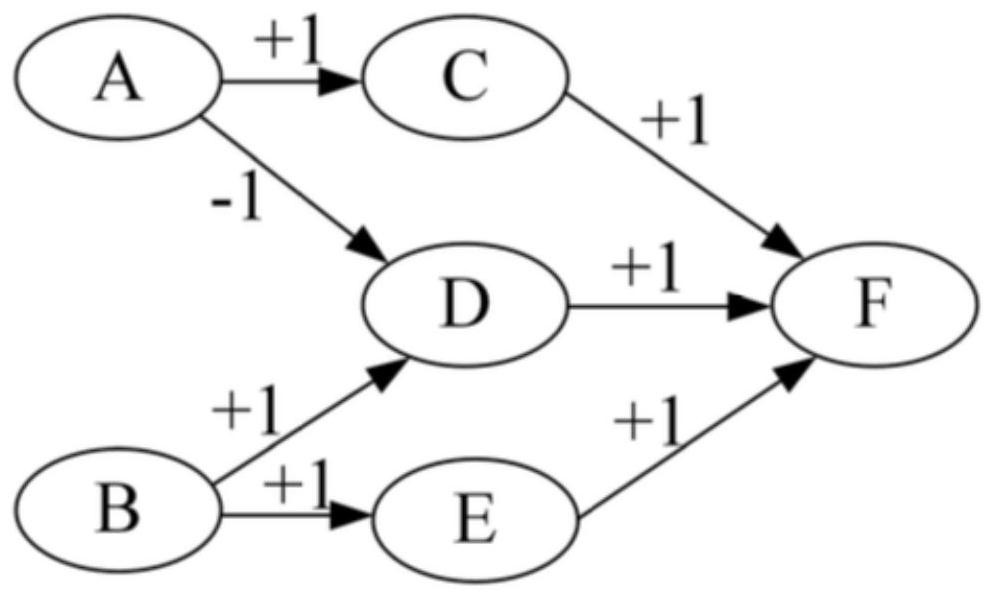
因果图由节点、单向箭头和标签组成;在因果图中,节点表示输入变量或中间变量或输出变量,单向箭头连接两个节点表示两个节点间的输入-输出关系,单向箭头上方的标签为“+1”表示输入增加时输出同时增加;单向箭头上方的标签为“-1”表示输入增加时输出减少;
步骤3:通过构建的因果图,得到两个(n+m+1)*(n+m+1)阶的结构矩阵;第一个结构矩阵为输入输出关系矩阵,输入输出关系矩阵的行和列均代表输入变量x
第二个结构矩阵为单调影响关系矩阵,单调影响关系矩阵的行和列均代表输入变量x
步骤4:连接输入输出关系矩阵左上角元素和右下角元素,形成一条输入输出关系矩阵对角线;
步骤4-1:假设输入输出关系矩阵对角线下方有p个值为1的元素d
步骤4-2:对任一个元素d
步骤4-3:对所有的元素d
步骤4-4:将输入输出关系矩阵对角线下方的元素值都变为0,形成半幅输入输出关系矩阵,再用半幅输入输出关系矩阵不断迭乘自身,直到得到一个最后一列所有元素值都为0的(n+m+1)*(n+m+1)阶矩阵,记录此时的迭乘次数,记为c;
步骤5:连接单调影响关系矩阵左上角元素和右下角元素,形成一条单调影响关系矩阵对角线;
步骤5-1:定义最长输入输出路径数h=g+c;再将单调影响关系矩阵迭乘自身h次;
步骤5-2:对于任意一个输入变量x
步骤5-3:对输入变量集X内的全部元素执行步骤5-2的操作,将x
步骤6:采用Sobol GSA方法计算因果图中每两个节点之间连接的权重;
步骤7:设定阈值d,若两个节点之间连接的权重小于阈值d,则视为低重要性链接,将输入输出关系矩阵和单调影响关系矩阵中两个节点表示的变量的交点位置的元素值从1变为0;若两个节点之间连接的权重大于等于阈值d,则视为高重要性链接,将输入输出关系矩阵和单调影响关系矩阵中两个节点表示的变量的交点位置的元素值予以保留;
步骤8:按照步骤7处理完成的新输入输出关系矩阵和新单调影响关系矩阵重新构建因果图;
步骤9:对新输入输出关系矩阵和新单调影响关系矩阵以及步骤8得到的新构建因果图执行步骤4和步骤5-1;
对于任意一个矛盾变量x
优选地,所述d=10%。
由于采用了本发明的一种水下航行器操稳性因果分析方法,具有以下有益效果:
1、和传统的灵敏度分析优化利用输入对输出的贡献率将设计变量拆分为重要变量和不重要变量不同,因果图不仅可以拆分变量,还能展现函数内的单调变化关系以及更好地分析白箱问题,使研究人员对内部构造更加透析。
2、传统分析中,灵敏度高的变量被认为是重要变量;但是灵敏度高不一定代表它需要被投入大量计算资源,而利用因果图分析,输入对输出的作用可能偏于单调变化,因此可以对输入进行简化。
附图说明
图1为本发明方法的因果图示意图。
图2为本发明实施例中水下航行器操稳性平衡攻角分析流程示意图。
图3为本发明实施例中水下航行器操稳性平衡攻角因果图示意图。
具体实施方式
下面结合附图和实施例对本发明进一步说明。
步骤1:水下航行器操稳性分析的变量包括输入变量、中间变量和输出变量;定义输入变量集为X={x
步骤2:基于详细定义范围下的变量间的单调影响原则,构造一个基于因果关系的因果图;
因果图由节点、单向箭头和标签组成;在因果图中,节点表示输入变量或中间变量或输出变量,单向箭头连接两个节点表示两个节点间的输入-输出关系,单向箭头上方的标签为“+1”表示输入增加时输出同时增加;单向箭头上方的标签为“-1”表示输入增加时输出减少;
因果图越精细,每个环节的因果关系就越简单,也就越容易得到每个环节的单调关系;此外,工程问题中的变量值通常大于零,这有助于在一定程度上避免非单调连接;
因果图用于检测变量是否存在矛盾,矛盾的意思为一个输入对输出的关系不单调,例如一个输入变量可以通过一个途径使输出增加同时通过另一途径使输出减小,则为矛盾变量,通过将一个完整路径箭头上的标签相乘,就可以检测该路径的输入和最终输出之间的关系;
步骤3:通过构建的因果图,得到两个(n+m+1)*(n+m+1)阶的结构矩阵;第一个结构矩阵为输入输出关系矩阵,输入输出关系矩阵的行和列均代表输入变量x
第二个结构矩阵为单调影响关系矩阵,单调影响关系矩阵的行和列均代表输入变量x
步骤4:连接输入输出关系矩阵左上角元素和右下角元素,形成一条输入输出关系矩阵对角线;
步骤4-1:假设输入输出关系矩阵对角线下方有p个值为1的元素d
步骤4-2:对任一个元素d
步骤4-3:对所有的元素d
步骤4-4:将输入输出关系矩阵对角线下方的元素值都变为0,形成半幅输入输出关系矩阵,再用半幅输入输出关系矩阵不断迭乘自身,直到得到一个最后一列所有元素值都为0的(n+m+1)*(n+m+1)阶矩阵,记录此时的迭乘次数,记为c;
步骤5:连接单调影响关系矩阵左上角元素和右下角元素,形成一条单调影响关系矩阵对角线;
步骤5-1:定义最长输入输出路径数h=g+c;再将单调影响关系矩阵迭乘自身h次;
步骤5-2:对于任意一个输入变量x
步骤5-3:对输入变量集X内的全部元素执行步骤5-2的操作,将x
步骤6:采用Sobol GSA方法计算因果图中每两个节点之间连接的权重;
步骤7:设定阈值d=10%,阈值选择的主要原则是,阈值不能过高而错过重要环节,也不能过低而无效;较高的阈值会使更多的变量被视为不重要的变量,移除过多的变量会降低优化的准确性。一般来说,以工程实例的经验,阈值不大于15%,在此选择了10%,该值在迭代次数和优化精度之间提供了很好的平衡,阈值可以根据需要进行调整。若两个节点之间连接的权重小于阈值d,则视为低重要性链接,将输入输出关系矩阵和单调影响关系矩阵中两个节点表示的变量的交点位置的元素值从1变为0;若两个节点之间连接的权重大于等于阈值d,则视为高重要性链接,将输入输出关系矩阵和单调影响关系矩阵中两个节点表示的变量的交点位置的元素值予以保留;
步骤8:按照步骤7处理完成的新输入输出关系矩阵和新单调影响关系矩阵重新构建因果图;
步骤9:对新输入输出关系矩阵和新单调影响关系矩阵以及步骤8得到的新构建因果图执行步骤4和步骤5-1;
对于任意一个矛盾变量x
具体实施例:
本发明提出的一种水下航行器操稳性因果分析方法,因果图示意图如图1所示。例如,“+1”的箭头从A到C意味着C增加时A增加;乘“+1”的箭头从A到C,“+1”箭头从C到F,乘法运算的结果是“+1”这意味着F对A是单调递增;同时在图1中,A影响F通过C或D,而两者作用相反,可认为A是矛盾变量。
结合水下航行器操稳性平衡攻角分析实例及附图作进一步说明。
主要分析流程如图2,包括:
1、确定水下航行器操稳性平衡攻角结构矩阵基本形式
因果图分析,最重要的是得到如附图1所示的示意图,这一部分需要人工预先输入到制定程序中。AUV的操稳性是指AUV在航行过程中通过操纵装置维持或者改变运动状态的能力。平衡特性是指AUV在做定常直线运动时通过维持一定的攻角和舵角来保持平衡的特性,由于攻角和舵角会增大AUV受到的航行阻力,不利于增加航程和航速,因此减小平衡攻角和平衡舵角可以提高AUV的平衡特性。
在有理想横滚控制的条件下,AUV在空间中的运动可以简化分解为纵向运动和侧向运动。纵向运动是指AUV在某个垂直平面内的运动,此时AUV的纵对称面始终与这个垂直平面重合。通过AUV的空间运动方程可以推导计算出AUV在做纵向定常水平直线运动时的平衡攻角解析表达式。
式中,ρ表示密度,S表示横截面积,v表示AUV航行速度,
2、确定水下航行器操稳性平衡攻角设计参数和范围
由平衡攻角解析表达式可知,输入变量有ρ,S,v,
AUV总体设计需要受到几何尺寸、重浮心位置以及稳定性等一系列参数的约束。在操稳性学科中,平衡攻角不宜过大,以防止增加航行阻力;平衡舵角也应尽可能小,以增加AUV的可操纵空间;动稳定度的范围一般在0-1之间,以保证AUV在运动受到干扰时能够恢复到原始运动状态。表1列出了AUV多学科优化设计问题的约束条件以及相应的约束范围。约束范围限定了输入变量的设计范围,由这些约束条件得到所分析问题的输入变量设计范围。
表1 AUV多学科优化设计问题的约束条件以及相应的约束范围
由于操稳性学科只是AUV多学科设计中的一部分,所以对应的平衡攻角输入变量的范围由此前外形结构流体等系统决定,具体范围如表2所示,该范围是通过对外形结构流体变量进行采样所确定的。采用OLHD方法选取样本点(该处样本空间为8维),保证样本在设计空间的分布尽可能均匀,样本点的数目选取为50。
表2输入变量取值范围
3、根据问题分析得出对应因果图
实例中水下航行器操稳性平衡攻角因果图示意图如附图3所示,其中变量范围严格选取以保证单调性,如规定平衡攻角为正的情况下进行该因果分析。
4、将因果图结构矩阵代入分析算法
首先进行定性分析,按照步骤3到步骤5,将因果图简化,以去除冗杂,并检测变量是否存在矛盾。经过分析,设计变量可以分为两部分,即矛盾变量:m和无矛盾变量:ρ,V,x
5、计算平衡攻角公式每条路径各部分的权重
通过考虑各个输入输出影响的权重,可以进一步简化因果图。在此步骤中,遵循灵敏度分析方法,使用Sobol GSA方法计算各个输入输出影响的权重。灵敏度方法的使用需要知道输入变量的范围,对于中间变量△G,G该例通过采样一定数量的随机点来确定。
6、根据权重简化平衡攻角公式因果图
权值低于阈值10%的链接被视为低重要性链接,并从两个结构矩阵中删除,即将“1”变为“0”。通过再次简化后的结构矩阵得到变量因果分析结果:m为重要矛盾变量;ρ,V,xc,
通过上述因果分析变量,最终将一个8变量优化问题降维至1变量优化问题。此外,在该实例中基于本发明方法的降维效果可以极大提高处理白箱问题的效率,相比已有的主成分分析更能描述各变量之间的关系也减少了计算量。
上述实施例子的详细步骤与结果表明,本发明提出的一种水下航行器稳定性因果分析方法,利用了灵敏度分析方法来计算各环节比重,并同时结合因果图技术构建了优化问题的结构矩阵,利用对结构矩阵不断变化,获得了问题的变量关系,并针对问题进行降维。此发明针对目前现有水下航行器主成分分析方法的缺点,提高了设计优化的逻辑与效率。
本发明的因果分析方法同样适用于水下航行器其余学科的优化设计,同时也适用于水下航行器的整体复杂多学科优化设计,使用范围广泛。
- 一种水下航行器操稳性因果分析方法
- 一种水下航行器操稳性因果分析方法