VR仿真翅膀
文献发布时间:2023-06-19 09:29:07
技术领域
本发明属于VR输入设备领域,具体涉及一种作为独立部件为VR系统提供挥翅动作信号的仿真翅膀。
背景技术
现有技术中,连接VR系统的模拟飞翔设备是一种落地式的飞行模拟装置,需要人趴上设备上,扳动刚性的“翅膀”。这种翅膀,只能布置在固定地面上一个相关设备上,一方面灵活性差、操作不便、体验差,另一方面必须要整合于一个模拟飞翔设备中使用,缺乏移动性,不能实现鸟类飞翔的灵活体验。
发明内容
本发明目的在于提供一种背负式的翅膀,旨在解决模拟鸟类飞翔设备中翅膀的仿真体验,从而获得如同鸟儿一样在空中飞翔搧动翅膀的感觉。
本发明提供的技术方案在于一种VR仿真翅膀,其包括:
穿戴机构,所述穿戴机构包括,用于体验者两臂分别穿戴的两个臂部构件,以及,连接两个所述臂部构件的中间构件;每个所述臂部构件与所述中间构件组成具有三个以上自由度的空间运动副;
动作传感器,所述动作传感器设置于所述臂部构件和/或中间构件上,用于采集两个所述臂部构件相对中间构件运动时的动作信号;所述动作信号包括位移信号和/或加速度信号;
以及,
控制器,所述控制器包括处理器、存储器、传感器接口以及通信接口;所述处理器读取并执行所述存储器存储的指令,所述存储器存储的指令致使所述处理器接收所述动作传感器的动作信号并通过所述通信接口向VR系统发送所述动作信号。
进一步的,所述动作传感器包括9轴传感器、光电传感器和扭矩传感器中的一个或者两个以上类型。
进一步的,所述臂部构件或所述中间构件上设有力反馈机构;所述处理器读取并执行所述存储器存储的指令,所述存储器存储的指令致使所述处理器接收所述通信接口从所述VR系统获得的力反馈信号并控制所述力反馈机构执行力反馈动作。
进一步的,所述力反馈机构包括固定磁体和移动磁体,以及与固定磁体和移动磁体连接的电流输出端;所述电流输出端输出控制所述固定磁体和/或所述移动磁体的磁场强度和方向的电流,以致使所述移动磁体相对所述固定磁体移动。
进一步的,所述空间运动副包括球头副。
进一步的,所述空间运动副包括被设计为轴线正交的两个转动副。
进一步的,所述臂部构件远离所述中间构件一端和靠近所述中间构件一端组成滑动副。
进一步的,所述臂部构件远离所述中间构件一端和靠近所述中间构件一端组成包括一个滑动自由度的空间运动副。
上述各技术方案的一些实施例中,所述中间构件固定于承载体验者的座椅的靠背上,所述座椅通过柔索吊离地面。
上述各技术方案的一些实施例中,所述中间构件固定于由体验者穿着的翼装的肩部,所述翼装通过柔索吊离地面。
本发明技术方案带来的有益效果包括但不限于:本发明的VR仿真翅膀,一方面,可以做为一个独立的设备与VR系统相联,另一方面,也可以作为一个独立部件与吊带、座椅、底座等吊装部件结合的组成各种不同形式的设备,使体验者可以在站立、坐、卧、躺等各种姿态中,体验飞翔的感受。
附图说明
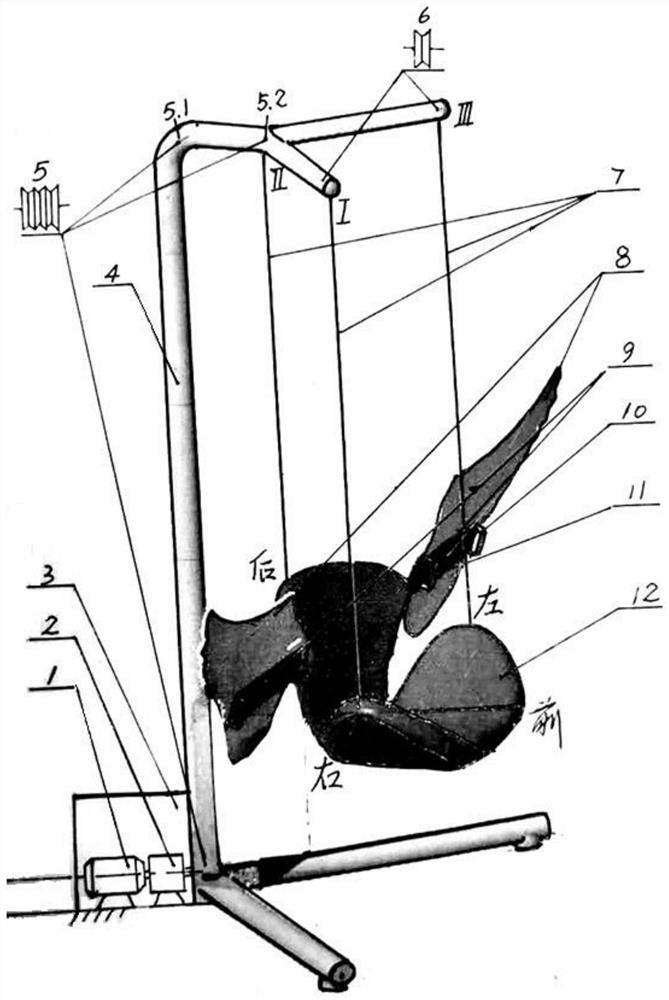
图1为本发明VR仿真翅膀一个实施例在一个VR仿真飞翔系统中的使用状态示意图;
图2为图1实施例中VR仿真翅膀的安装状态示意图;
图3为图1实施例中VR仿真翅膀的穿戴机构的结构示意图;
图4为本发明VR仿真翅膀一个实施例中空间运动副的结构示意图;
图5为本发明VR仿真翅膀另一个实施例中空间运动副的结构示意图;
图6为本发明VR仿真翅膀一个实施例中VR仿真翅膀使用状态的通信原理示意图;
图7为本发明VR仿真翅膀另一个实施例中VR仿真翅膀使用状态的通信原理示意图;
图8为本发明VR仿真翅膀一个实施例中力反馈机构工作原理示意图;
图9为图8实施例中力反馈单元的结构示意图;
其中,电机1、减速机2、安全罩壳3、立柱4、绳盘5、滑轮6、柔索7、翅膀8、骨杆9、把手10、铰链11、座椅12、传感器13、螺钉14。
具体实施方式
下面将结合本发明实施例的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的实施例能够以除了在这里图示或描述的内容以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或模块的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或模块,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或模块,本文中所出现的模块的划分,仅仅是一种逻辑上的划分,实际应用中实现时可以有另外的划分方式,例如多个模块可以结合成或集成在另一个系统中,或一些特征可以忽略,或不执行,另外,所显示的或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,模块之间的间接耦合或通信连接可以是电性或其他类似的形式,本文中均不作限定。并且,作为分离部件说明的模块或子模块可以是也可以不是物理上的分离,可以是也可以不是物理模块,或者可以分不到多个电路模块中,可以根据实际的需要选择其中的部分或全部模块来实现本发明实施例方案的目的。
实施例一
如图1、2所示,本实施例是一种VR仿真翅膀,作为独立部件安装于一个VR仿真飞翔系统中,由体验者佩戴并在被操作时为该VR仿真飞翔系统的VR系统提供动作信号。
本实施例的VR仿真飞翔系统,包括三组独立的驱动机构,每组驱动机构由电机1、减速机2和安全罩壳3构成,根据不同控制信号分别收放三股柔索7。其中,由立柱4以及立柱4下方的V形底座和立柱4上方的Y形滑轮架构成支架。立柱4和Y形滑轮架中空,用于柔索7在其内部移动。Y形滑轮架两侧枝端部处分别设有柔索出口I、III,同时在柔索出口I、III分别设有滑轮6,滑轮6为单槽定滑轮,分别作为侧方定滑轮绕装侧方柔索7。Y形滑轮架在两侧枝之间设有多个绳盘5,绳盘5均为三槽定滑轮,其中间槽作为调平定滑轮用于绕装调平柔索7,两侧槽分别绕装侧方柔索7和侧方柔索7,其中,柔索出口II处设绳盘5.2,Y形滑轮架与立柱4交接处设绳盘5.1,立柱4下端接近减速机2处还设有第三个绳盘。三组独立的驱动机构分别提供独立运行的第一输出端、第二输出端和第三输出端,其中,第一输出端与调平柔索连接,第二输出端与吊装部一侧的侧方柔索连接,第三输出端与吊装部另一侧的侧方柔索连接。各个输出端引出的柔索,分别绕装在第三个绳盘三个槽中,并藉由此改变方向继续沿立柱4延展,在立柱4顶端的绳盘5.1处第二次改变方向后延Y形滑轮架中枝延展,在柔索出口II处绕装绳盘5.2后,其中,调平柔索7直接从柔索出口II垂下与座椅12的椅背中部连接,两股侧方柔索7分别沿Y形滑轮架两侧枝延展至两侧枝的端部柔索出口I、III处并分别绕装于滑轮6上,之后分别从柔索出口I、III垂下并连接座椅12左右两侧连接。在设备运行中,随着位移输出端正反转动,三股柔索同时收放,座椅12作为吊装部整体的承载体验者上下运行,这种分三处独立迁移柔索的方式,可以使得座椅产生前后方向的俯仰动作、左右方向的倾斜动作和垂直方向上的上下动作,分别可以提供前后加速体验、左右加速体验和上下加速体验。
本实施例中,三条柔索在位移输出端即各自连接,然后借由三槽绳盘沿同一根立柱安放三根柔索,使用三台电机分别驱动拉拽,达到对模拟飞翔的姿态改变,提供了简化的前后、左右、上下三维度动态体验的支架结构。
如图2、3所示,本实施例的VR仿真翅膀通过中间构件91固定于承载体验者的座椅12的靠背上,翅膀8的骨杆9上设有为体验者提供着力点的把手10,以便体验者抓握。臂部构件由骨杆9、传感器13和铰链11的固定端构成,铰链11安装在骨杆9的靠近中间构件91的一端,翅膀8通过螺钉14和骨杆9相连,形成基本为刚性的整体构件,铰链11支持以中间构件91为固定端,以翅膀8远离中间构件91一侧为游离端的,上下方向,前后方向的挥动,以及以骨杆9为轴的旋转,实现了三个自由度的运动。在一些实施例中,如图4所示,铰链11采用旋转平面轴承111和枢接轴实现上述三个自由度的空间运动副结构,其中,枢接轴两侧的平面轴承111分别与臂部构件和中间构件转动连接,使得枢接轴可以相对臂部构件和中间构件自由转动,枢接轴两侧的平面轴承111的转动轴在任何位置均基本与枢接轴保持正交。在另一些实施例中,如图5所示,铰链11为球头副,球头副的两部分分别与一个臂部构件和中间构件固定,使得臂部构件与中间构件形成三个自由度的空间运动副结构。在另一些实施例中,铰链11还可以包括滑动副,如臂部构件本身还包括一个滑动副结构,示范的,在臂部构件远离中间构件一端和靠近中间构件一端组成滑动副,或者,臂部构件远离中间构件一端和靠近中间构件一端组成包括一个滑动自由度的空间运动副,以便优化体验者带动臂部构件相对中间构件转动时,体验者手臂旋转支点与臂部构件的旋转支点不同心形成的旋转半径差。可以理解的是,本实施例中穿戴机构包括,体验者两臂分别穿戴的臂部构件,以及,连接两个所述臂部构件的中间构件;臂部构件与中间构件组成具有三个自由度的空间运动副。在其他实施例中可以增加中间构件,以实现臂部构件相对固定的中间构建的三个以上自由度的空间运动。
示范的,本实施例采用如图6所示的系统结构,当体验者操作把手10搧动翅膀8时,传感器13作为动作传感器产生信号,控制器的处理器读取并执行其存储器存储的指令,存储器存储的指令致使处理器接收动作传感器13的动作信号并通过通信接口向VR系统发送该动作信号,以便VR系统控制虚拟环境中的翅膀产生动作相应的声音和/或图像,体验者从VR系统的声音和/或图像获得虚拟体验。本实施例中传感器为多个红外角度传感器,通过采集翅膀与椅背的多个二维角度,采集所述翅膀与所述吊装部之间相对位移的信号,并通过有线或者无线传输方式直接或者通过控制器中转的传输给VR系统,用于控制所述VR系统输出挥翅动作。在另一些实施例中,红外角度传感器也可以使用多个霍尔传感器、拉绳传感器替换用于采集相对位移。在另一实施例中,动作传感器由由单个或成组光电传感器组成,光电传感器在运动副的一个构件上设置发光二极管和光学感应器,发光二极管向运动副另一个构件的表面投射脉冲光,脉冲光可以是红光、红外光、激光等,光学感应器接收反射的脉冲光以获得所述表面相对第一个构件的位移,如在球头副结构时可以使用轨迹球式鼠标的光电传感器驱动结构,当臂部构件相对中间构件绕轴相对运动时,动作传感器产生信号,控制虚拟的翅膀“搧动”。在另一些实施例中,红外角度传感器也可以由三轴加速度传感器替换,以获得挥翅的加速度信号,以及积分获得的位移信号。在一些臂部构件相对中间构件较复杂的场景中,动作传感器可以为集成的9轴传感器,包括3轴加速度传感器(即加速计)、3轴角速度传感器(即陀螺仪)、3轴磁感应传感器(即磁力计)。
可以理解的是,动作传感器并不局限于设置于臂部构件上,在一些实施例中也可以设置在中间构件上,这些现有技术的传感器由于不同的采集原理采集两个臂部构件相对中间构件运动时的动作信号,包括位移信号或加速度信号,即被视为本实施例的等同替换。
实施例二
如图7所示,本实施例与实施例一的区别在于,本实施例的VR仿真翅膀还包括设置在臂部构件中的力反馈构件,以便控制器的处理器读取并执行其存储器存储的指令,存储器存储的指令致使处理器接收通信接口从VR系统获得的力反馈信号并控制力反馈机构执行力反馈动作。
具体的,如图8、9所示,本实施例中,VR仿真翅膀的力反馈机构包括设置在中空骨杆内的第一电源模块100、第一控制模块101、反馈单元103以及无线传输单元106。力反馈单元103包括电磁铁P1、P2、P3,分别由可调电源装置U1、U2、U3的电流输出端的输出电流控制各自的磁场强度和方向。其中电磁铁P1、P3为位置固定的固定磁体,电磁铁P2为移动磁体,其沿一个预设轨道在电磁铁P1、P3之间由磁场控制往复移动;控制器包括电流输出端;电流输出端输出控制固定磁体和/或移动磁体的的电流,以致使移动磁体相对固定磁体移动。
具体的,本实施例中,力反馈机构包括第一电源模块100、与第一电源模块电连接的第一控制单元101、与第一控制单元电连接的反馈单元103以及无线传输单元106。控制器包括第二电源模块104以及与第二电源模块104电连接的第二控制单元105。其中,无线传输单元106与第二控制单元105通信连接,接收第二控制单元105发出的力反馈信号并根据力反馈信号分别控制可调电源装置U1、U2、U3的电流输出端的输出电流。
本实施例中,第一电源模块100和第二电源模块104分别设有用于通讯和供电的串行总线接口。可以根据配置,实现多种控制略,示范的,当采用有线传输装置时,第一电源模块100的所述串行总线接口一方面给第一控制单元101供电,另一方面和第一控制单元101进行通信。示范的,采用无线传输装置时,第一电源模块100仅供电于第一控制单元101,只起到供电作用;当采用无线传输装置时,第二供电模块104给第二控制单元105供电,第二控制单元105通过无线传输单元106和第一控制单元101通信,并进一步作用于反馈单元103。
本实施例中,反馈单元103根据所述第一控制单元101或者所述第二控制单元105传递的信号完成内部撞击力反馈的调整工作。其包括电磁铁P1、电磁铁P2、电磁铁P3以及控制所述电磁铁P1的可调电源装置U1、控制所述电磁铁P2的可调电源装置U2以及控制电磁铁P3的可调电源装置U3。其中电磁铁P1、电磁铁P2、电磁铁P3分别设有N极和S极,电磁铁P2位于电磁铁P1和电磁铁P1中间且三个电磁铁处于同空间同一水平面上,电磁铁P2的N极和S极分别靠近所述电磁铁P1的S极和所述电磁铁P3的N极。
本实施例中,在反馈单元103中电磁铁P1、电磁铁P2、电磁铁P3分别由铁块以及用于缠绕铁块的线圈组成,并且电磁铁P1、电磁铁P2、电磁铁P3等三个电磁铁中线圈分别由可调电源装置U1、可调电源装置U2以及可调电源装置U3通电,分别生成各自的N极和S极,且电磁铁P1、电磁铁P2以及电磁铁P3等三块电磁铁两两之间的间距保持在维持电磁吸力临界点时的最大距离。
本实施例中,在通过分别调整用于控制电磁铁P1的可调电源装置U1和用于控制电磁铁P2的可调电源装置U2以及用于控制电磁铁P3的可调电源装置U3通电的正负极属性,即当改变可调电源U1电压正负极方向或者可调电源U1为零,而此时所述可调电源U3不变的情况下,此时电磁铁P2由初始位置受磁力平衡而处于电磁铁P1和电磁铁P3中间的状态,发生如下变化:往电磁铁P3的位置移动并和电磁铁P3发生碰撞。紧接着改变所述可调电源U3电压正负极方向或者可调电源U3电压为零,而此时可调电源U1恢复正常供电,发生如下变化:此时电磁铁P2从电磁铁P3位置往电磁铁P1方向移动并和电磁铁P1发生碰撞。
经过上述一系列控制调节,实现反馈单元103中磁铁P2实现往复移动且和电磁铁P1和电磁铁P3的碰撞,即为撞击式的力反馈,最终使VR体验更加真实。
可以理解的是,力反馈机构的固定磁体和移动磁体并不局限于本实施例中的数量和位置。另一些实施例中,可以通过设计多个移动维度的移动磁体实现多方向的撞击体验。另一些实施例中,可以增加移动磁体的数量实现更快速或者跟复杂的持续性撞击体验,这些实施例中可能需要提供更多的固定磁体以提供复杂的磁场变化。
本实施例中,为了增加力反馈的力度反应条件,动作传感器还包括设置在骨杆上的扭矩传感器,以提供绕轴转矩的信号,控制器根据该信号提供相应的力反馈信号。
在一些改进的实施例中,VR仿真翅膀上力反馈机构的控制系统可以包括有线传输装置和无线传输装置,示范的,有线传输单元包括第一电源模块100、与第一电源模块电连接的第一控制单元101、与第一控制单元电连接的反馈单元103;无线传输单元包括第二电源模块104、与第二电源模块电连接的第二控制单元105、与第二控制单元电连接的无线传输单元106且无线传输单元电连接第一控制单元;第一电源模块和第二电源模块分别设有用于通讯和供电的串行总线接口;反馈单元根据第一控制单元或者第二控制单元传递的信号完成内部撞击力反馈的调整。可以理解的是,本实施例及改进实施例中的力反馈机构,可以解决目前市场上虚拟现实设备技术中力反馈复杂性和体验效果的匮乏问题,通过电磁体之间的撞击解决娱乐体验设备具备的瞬时强烈撞击体验功能,以给人真实感,
实施例三
本实施例为安装于翼装上的VR仿真翅膀,与实施例一的区别在于,实施例一中,中间构件固定于承载体验者的座椅的靠背上,座椅通过柔索吊离地面;本实例中,中间构件固定于由体验者穿着的翼装的肩部,翼装通过柔索吊离地面。由于翼装本身为柔软材质,本实施例的中间构件在翼装肩部提供了一个刚性的支撑,以便实现臂部构件随体验者手臂移动时,臂部构件产生相对中间构件的运动,进而可以通过动作传感器采集该运动信号。
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统,装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
在本申请所提供的几个实施例中,应该理解到,所揭露的系统,装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- VR仿真翅膀
- 一种蜻蜓仿真模型的翅膀摆动结构