一种随机线谱自适应跟踪消除方法和系统
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及信号处理技术领域,特别是涉及一种随机线谱自适应跟踪消除方法和系统。
背景技术
随着技术的发展特别是声隐身技术在无人艇方面的发展,一些目标声信号中的线谱分量会随测试环境大幅降低,呈现弱谱状态。另外,当测试环境恶劣时,风速和海浪等环境的影响会使无人艇上线谱特征的提取变得困难。而信号检测常使用功率谱估计方法,但在海面这种复杂的工作环境下要求对信号进行有效的检测成为了迫在眉睫的难题。
在信号处理中往往会采用滤波器来极大地衰减其他频率部分,利用滤波器的选频作用,可以进行频谱分析。虽然现有技术中公开了采用滤波器,但是并不能使滤波输出的总功率得到最大程度地衰减,从而也无法满足无人艇的线谱消除需求。
发明内容
本发明的目的是提供一种随机线谱自适应跟踪消除方法和系统,以使滤波输出的总功率得到最大程度地衰减,从而也满足无人艇的线谱消除需求。
为实现上述目的,本发明提供了如下方案:
一种随机线谱自适应跟踪消除方法,包括:
获取无人艇的振动信号;
采用自适应跟踪算法,根据所述振动信号跟踪确定激振器产生的随机信号,以得到跟踪线谱;
采用凹陷滤波器降低所述跟踪线谱中各所述随机信号的线谱峰值;
获取降低线谱峰值后的随机信号;
根据所述振动信号和所述降低线谱峰值后的随机信号得到参余误差信号;
根据所述参余误差信号生成控制力以消除系统振动;所述控制力为与所述参余误差信号产生的干扰力相反的作用力。
优选的,所述获取无人艇的振动信号,之前还包括:
获取无人艇底部遭受海浪冲击时的振动信号和所述无人艇发动时自身的振动信号;
根据所述无人艇底部遭受海浪冲击时的振动信号和所述无人艇发动时自身的振动信号确定振动信号。
优选的,所述根据所述参余误差信号生成控制力以消除系统振动,具体包括:
采用压电陶瓷致动器根据所述参余误差信号生成控制力以消除系统振动。
优选的,所述凹陷滤波器为n阶凹陷滤波器。
优选的,所述凹陷滤波器的传递函数为:
其中,ω
一种随机线谱自适应跟踪消除系统,包括:
第一振动信号获取模块,用于获取无人艇的振动信号;
跟踪线谱确定模块,用于采用自适应跟踪算法,根据所述振动信号跟踪确定激振器产生的随机信号,以得到跟踪线谱;
线谱峰值降低模块,用于采用凹陷滤波器降低所述跟踪线谱中各所述随机信号的线谱峰值;
随机信号获取模块,用于获取降低线谱峰值后的随机信号;
参余误差信号确定模块,用于根据所述振动信号和所述降低线谱峰值后的随机信号得到参余误差信号;
控制力生成模块,用于根据所述参余误差信号生成控制力以消除系统振动;所述控制力为与所述参余误差信号产生的干扰力相反的作用力。
优选的,还包括:
第二振动信号获取模块,用于获取无人艇底部遭受海浪冲击时的振动信号和所述无人艇发动时自身的振动信号;
振动信号确定模块,用于根据所述无人艇底部遭受海浪冲击时的振动信号和所述无人艇发动时自身的振动信号确定振动信号。
优选的,所述控制力生成模块,具体包括:
控制力生成单元,用于采用压电陶瓷致动器根据所述参余误差信号生成控制力以消除系统振动。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明提供的随机线谱自适应跟踪消除方法和系统,通过结合自适应跟踪算法和凹陷滤波器实现复合控制,在振动环境下通过自适应跟踪算法进行跟踪测得的跟踪线谱后,利用凹陷滤波器的原理对跟踪线谱中各频点的峰值进行拉低,以使滤波输出的总功率得到最大程度地衰减,达到更好的振动控制效果,从而也满足无人艇的线谱消除需求。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
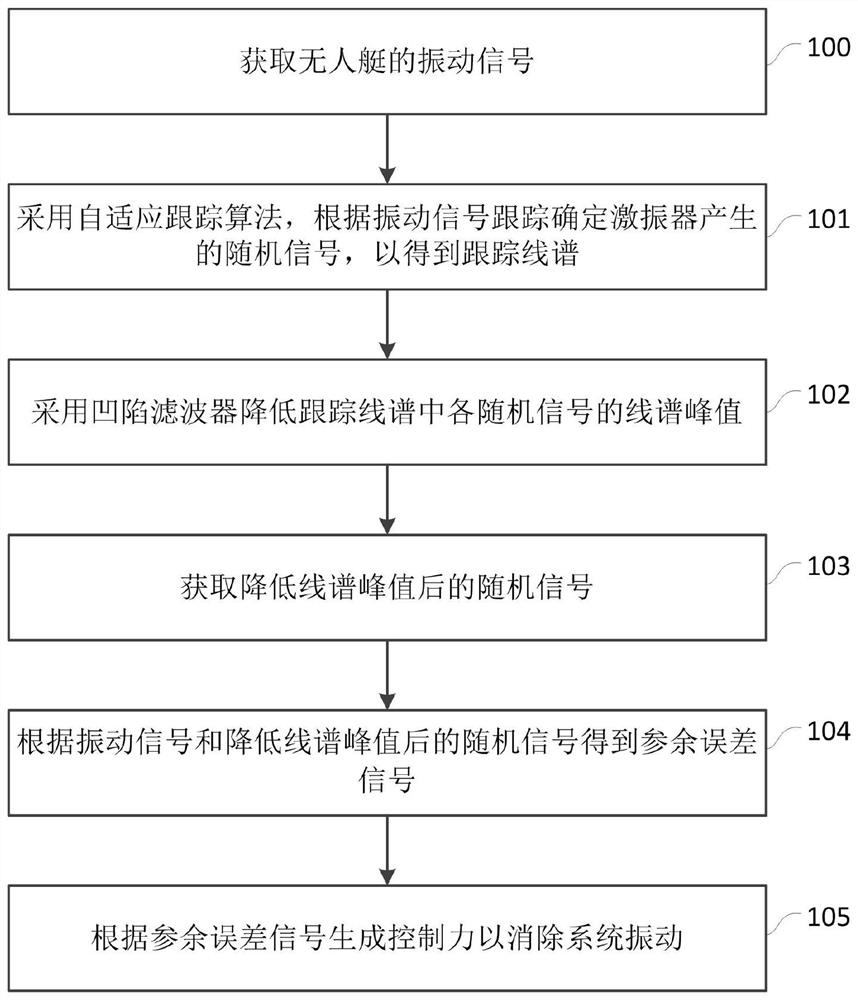
图1为本发明提供的随机线谱自适应跟踪消除方法的流程图;
图2为本发明实施例提供的自适应算法原理框图;
图3为将本发明提供的随机线谱自适应跟踪消除方法应用于隔振平台结构中的原理简化图;
图4为本发明提供的随机线谱自适应跟踪消除系统的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种随机线谱自适应跟踪消除方法和系统,以使滤波输出的总功率得到最大程度地衰减,从而也满足无人艇的线谱消除需求。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
在无人艇行驶过程中,海浪的冲击会造成无人艇底部产生一定的振动,使得无人艇上的设备对勘测对象的测试不够精准,此时需要应用隔振设备来减小艇底部传至设备处的振动。
基于此研发背景,本发明提供了一种随机线谱自适应跟踪消除方法和系统。图1为本发明提供的随机线谱自适应跟踪消除方法的流程图,如图1所示,一种随机线谱自适应跟踪消除方法,包括:
步骤100:获取无人艇的振动信号。
步骤101:采用自适应跟踪算法,根据振动信号跟踪确定激振器产生的随机信号,以得到跟踪线谱。本发明中采用的自适应跟踪算法优选为LMS算法。
其中采用LMS算法进行自适应线谱跟踪的计算公式如下:
滤波器输出信号:
误差信号:e(n)=d(n)-y(n)=d(n)-ω
权值系数更新:ω(n+1)=ω(n)+2ue(n)x(n)。
其中,x(n)为输入信号矢量,ω(n)为滤波器权向量,d(n)为期望信号,u是滤波器的步长。LMS算法目的为了使误差为零,来实现跟踪采集的随机信号。
设置的期望信号实质上就是无人艇上设定的期望值,以确保测量设备测得数据在误差范围内。
步骤102:采用凹陷滤波器降低跟踪线谱中各随机信号的线谱峰值。本发明采用的凹陷滤波器为n阶凹陷滤波器,优选为Notch滤波器。
该凹陷滤波器的传递函数为:
其中,ω
设有n个过渡采样点,其幅值为Xi,i=1,2,···,n,现令阻带内n个频率上的幅值响应均为零,即|H(e
步骤103:获取降低线谱峰值后的随机信号。
步骤104:根据振动信号和降低线谱峰值后的随机信号得到参余误差信号。
步骤105:根据参余误差信号生成控制力以消除系统振动。控制力为与参余误差信号产生的干扰力相反的作用力。
在该步骤105中,本发明优选采用压电陶瓷致动器根据参余误差信号生成控制力以消除系统振动。
作为本发明的一优选实施例,在步骤100之前还包括:
获取无人艇底部遭受海浪冲击时的振动信号和无人艇发动时自身的振动信号。
根据无人艇底部遭受海浪冲击时的振动信号和无人艇发动时自身的振动信号确定振动信号。
下面提供一个具体实施案例进一步说明本发明的方案,本发明具体实施案例中以将本发明提供的随机线谱自适应跟踪消除方法应用于隔振平台结构中为例进行阐述。
对于普通的隔振元件简化图,负载平台可看作勘测对象的设备部分,基础平台看做无人艇底部受到激振的部分,以下均采用负载平台与基础平台进行描述。
信号采集传感器安装在基础平台中心处,用于采集基础平台的振动信号,也就是无人艇底部受到的振动信号(此处的振动信号由频谱测试与分析仪中的仿真发生器产生,生成随机微振动信号给外部激振器激励基础平台。其主要是产生110Hz、320Hz、740Hz、1300Hz、1900Hz或3700Hz的随机信号),而两个传感器分别安在负载平台和基础平台上,以分别采集基础平台信号和振动后的负载平台的残余振动信号,采集后的信号传递给减震平台的控制器进行LMS自适应算法计算。
如图2所示,输入信号x(n)是无人艇底部遭受海浪冲击的振动信号s(n)与无人艇发动时自身的振动信号v(n)的振动信号的总和,依据无人艇行驶的实际情况,人为选择合适的延时时间后,可以区分s(n)和v(n)。因本发明主要是针对s(n)进行的研究,因此,在采用的振动信号x(n)中仅保留与s(n)振动信号的相关的部分。
自适应跟踪算法中采用LMS算法进行自适应线谱跟踪,计算公式如下:
滤波器输出信号:
误差信号:e(n)=d(n)-y(n)=d(n)-ω
权值系数更新:ω(n+1)=ω(n)+2ue(n)x(n)。
上述为LMS算法的推导过程,其中,x(n)为输入信号矢量,ω(n)为滤波器权向量,d(n)为期望信号,u是滤波器的步长。
LMS算法目的为了使误差为零,来实现跟踪采集的随机信号。
跟踪采集得到随机信号后,本发明采用Notch滤波器进行降低线谱峰值的操作,达到抑制振动信号的效果。
如图2和图3所示,无人艇底部受海浪的振动信号x(n)通过隔振元件的传递函数G
其中,自适应跟踪算法的处理过程为:
传感器分别采集基础平台的信号和经过振动平台的负载平台上的残余振动信号q(n),采集到的基础平台信号x(n)通过减振平台的传递函数Gb(s)得到隔振后的信号f(n),并且x(n)传递给减振平台的主动控制器进行LMS自适应算法计算来跟踪线谱。
本发明中的隔振平台,对采集的随机信号采用n阶凹陷滤波器,产生n个阻带凹陷。设计简单的凹陷滤波器的传递函数为:
其中,ω
结合自适应算法和凹陷滤波器在控制框图(图3)中实现复合控制,在振动环境下通过自适应算法进行线谱跟踪,再利用凹陷滤波器的原理对振动线谱的峰值拉低,达到了良好的振动控制效果。
其中跟踪得到的线谱由跟踪得到的随机信号频点构成,其横坐标为频率,纵坐标为单位dB。
最后将采集所得基础平台上最初产生的振动信号以及采用本发明提供的上述跟踪消除方法处理之后的信号传递到频谱测试与分析仪,频谱测试与分析仪对这两个信号进行信号处理和分析,可以明显得到线谱的峰值有明显的降低,进而表明该方法具有显著的抑振效果。
对应于上述提供的随机线谱自适应跟踪消除方法,本发明还提供的一种随机线谱自适应跟踪消除系统,如图4所示,该系统包括:第一振动信号获取模块1、跟踪线谱确定模块2、线谱峰值降低模块3、随机信号获取模块4、参余误差信号确定模块5和控制力生成模块6。
其中,第一振动信号获取模块1用于获取无人艇的振动信号。
跟踪线谱确定模块2用于采用自适应跟踪算法,根据振动信号跟踪确定激振器产生的随机信号,以得到跟踪线谱。
线谱峰值降低模块3用于采用凹陷滤波器降低跟踪线谱中各随机信号的线谱峰值。
随机信号获取模块4用于获取降低线谱峰值后的随机信号。
参余误差信号确定模块5用于根据振动信号和降低线谱峰值后的随机信号得到参余误差信号。
控制力生成模块6用于根据参余误差信号生成控制力以消除系统振动。控制力为与参余误差信号产生的干扰力相反的作用力。
该控制力生成模块6包括控制力生成单元。该控制力生成单元用于采用压电陶瓷致动器根据参余误差信号生成控制力以消除系统振动
作为本发明的一优选实施例,上述随机线谱自适应跟踪消除系统还包括:第二振动信号获取模块和振动信号确定模块。
其中,第二振动信号获取模块,用于获取无人艇底部遭受海浪冲击时的振动信号和无人艇发动时自身的振动信号。
振动信号确定模块,用于根据无人艇底部遭受海浪冲击时的振动信号和无人艇发动时自身的振动信号确定振动信号。
综上,本发明提供的技术方案相对于现有技术具有以下优点:
1、自适应算法根据外界环境扰动信息或抑振系统的参数变化,自适应控制系统能够自动调节更新权值函数以获得理想的性能,采用的LMS自适应算法简单,容易实现。
2、采用Notch滤波器可以对某个频率点进行衰减,对其余部分不产生损失,极大方便了对谱线峰值的降低。
3、采用凹陷滤波器的自适应跟踪主动控制可以有效降低共振峰幅值,通过凹陷滤波器的对特定频率点产生需要的相反补偿,从而降低峰值。
4、双环控制器组成振动系统的主动复合控制器,该控制器具有较宽的控制带宽、较高的频响以及较快的计算速度、较高的计算效率,前馈控制器引入自适应控制系统能够有效解决主动反馈系统的参数调节与系统稳定性所导致的主动隔振带宽不足及时间延迟的问题。
5、采用凹陷滤波器算法可以调节变换频点,频带宽度以及凹陷深度。
6、此发明针对随机线谱的产生,例如风、海浪等所引起的随机信号,并具有良好的抑振效果。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种随机线谱自适应跟踪消除方法和系统
- 一种消除地震数据随机噪声的方法和系统