补偿微压计
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及仪表设备技术领域,尤其涉及一种补偿微压计。
背景技术
压力计量包括超微压、中压、高压和真空四个部分,各自具有单独的检定系统。我国的检定系统规定了微压的测量范围为-2.5kPa~2.5kPa,用作微压标准的主要有补偿式压力计、液体压力计、数字压力计以及微压活塞式压力计。微压测量被广泛的应用于《国家中长期科学和技术发展规划纲要》所包含的重点领域和优先主题,特别是能源、水和矿产资源的开发利用,环境监测保护、现代农业、制造业、制药业、交通运输业、国防和大飞机制造等行业都离不开微压计量。例如,在航天、航空以及大飞机制造中的高度计、空速表、大气数据测试仪都是利用微压和微差压测量技术进行飞行高度、飞行速度和大气综合数据测量的。在我们国家的很多重大专项、前沿技术研究中,微压计量发挥了重大的作用。
现有的补偿式微压计是基于U形管测压原理,在压力作用下形成液柱高度差,通过旋转一根带有刻度的螺杆来改变一个可动容器的位置,并通过观察容器中尖头和水面的倒影的位置使液面重新达到平衡位置,根据刻度对应的水柱高度差进行读数。这种仪器在实际使用时具有以下缺陷:
第一,压力工作点的设定必须通过手拨螺旋杆来进行,每转一圈仅提升2毫米,满量程2.5kPa约对应250毫米需转动125圈,既费力又会在频繁的转动中磨损螺杆,给读数带来误差;
第二,在读数时,必须非常仔细的调准尖头和水面倒影的位置,费时费力,还会带来很大的测量误差。在对补偿压力计进行测量时,同时将两台压力计进行平衡位置调准,在对标准压力计进行平衡调准时,被检压力计的平衡会发生改变,而当被检压力计平衡位置调准时,标准压力计的平衡也会被破坏;
第三,补偿式微压计是通过旋转螺杆的角度来改变容器的位置,螺杆转动的角度对应一个固定量值的液柱变化即压力变化,螺杆的加工精度、形状误差和机械结构的配合情况直接影响读数的准确度;
第四,补偿式微压计平衡调准时,只能观察一个容器的液面情况,在实际测量中,液体会产生挂壁现象,使液体的体积发生改变,压力作用下连接管道的体积变化温度变化、压力作用下连接管道的体积变化、液体蒸发同样也会使体积发生改变,这样实际的液柱差就会和刻度盘指示的读数发生偏差。
发明内容
有鉴于此,本发明实施例提供一种补偿微压计,主要目的是提供一种能够减小测量误差的补偿微压计。
为达到上述目的,本发明主要提供如下技术方案:
本发明实施例提供了一种补偿微压计,包括:
固定部件,所述固定部件包括底座和固定容器,所述固定容器设置在所述底座上,用于装载液体介质;
移动部件,所述移动部件包括升降部件、位移传感器和第一移动容器部件,所述位移传感器设置在所述底座上,所述升降部件包括升降台和升降轨道,所述升降轨道设置在所述底座上,所述升降台设置在所述升降轨道上,所述第一移动容器部件设置在所述升降台上,所述第一移动容器部件包括激光位移部件和反射部件,所述激光位移部件设置在所述反射部件的上部,所述反射部件包括稳定支架、反射体和装载腔体,所述装载腔体与所述固定容器通过第一导管相互连通,所述反射体设置在所述装载腔体内,所述稳定支架活动连接于所述反射体,所述激光位移部件包括处理器、发射器和接收器,所述处理器分别连接于所述发射器和所述接收器,所述发射器能够朝向所述反射体发射光线,所述接收器能够接收反射体反射的光线。
进一步的,所述反射体包括反射平台、漂浮台和活动架,所述漂浮台设置在所述装载腔体内,所述活动架设置在所述漂浮台的两端,并且活动连接于所述稳定支架,所述反射平台设置在所述漂浮台的中部,所述反射平台具有反射平面,用于反射光线。
进一步的,所述稳定支架具有第一凹口、第二凹口和透光孔,所述第一凹口和所述第二凹口设置在所述漂浮台的两端,所述活动架分别穿过所述第一凹口和所述第二凹口,所述透光孔设置在所述反射平台和所述激光位移部件之间。
进一步的,所述激光位移部件还包括透镜,所述透镜设置在所述接收器的下部。
进一步的,第二移动容器部件和第三移动容器部件,所述第二移动容器部件和所述第三移动容器部件分别固定连接于所述底座,并且设置在所述固定容器的两侧。
进一步的,所述升降部件还包括驱动部件,所述驱动部件设置在所述固定容器的顶部,所述驱动部件的输出端连接于所述升降轨道,用于驱动所述升降轨道转动。
进一步的,所述位移传感器为光栅尺。
进一步的,所述固定容器的内壁表面覆盖防挂壁涂层。
进一步的,水平仪,所述水平仪设置在所述底座上。
进一步的,调平部件,所述调平部件设置在所述底座的底部。
与现有技术相比,本发明具有如下技术效果:
本发明实施例提供的技术方案中,固定部件的作用是对固定容器进行固定,固定部件包括底座和固定容器,固定容器设置在底座上,用于装载液体介质;移动部件的作用是通过移动容器部件内的液位变化获得页面高度的变化,从而计算出压力差,移动部件包括升降部件、位移传感器和移动容器部件,位移传感器设置在底座上,升降部件包括升降台和升降轨道,升降轨道设置在底座上,升降台设置在升降轨道上,移动容器部件设置在升降台上,移动容器部件包括激光位移部件和反射部件,激光位移部件设置在反射部件的上部,反射部件包括稳定支架、反射体和装载腔体,装载腔体与固定容器通过第一导管相互连通,反射体设置在装载腔体内,稳定支架活动连接于反射体,激光位移部件包括处理器、发射器和接收器,处理器分别连接于发射器和接收器,发射器能够朝向反射体发射光线,接收器能够接收反射体反射的光线,相对于现有技术,通过旋转一根带有刻度的螺杆来改变一个可动容器的位置,并通过观察容器中尖头和水面的倒影的位置使液面重新达到平衡位置,根据刻度对应的水柱高度差进行读数,压力工作点的设定必须通过手拨螺旋杆来进行,每转一圈仅提升2毫米,满量程2.5kPa约对应250毫米需转动125圈,既费力又会在频繁的转动中磨损螺杆,给读数带来误差,在读数时,必须非常仔细的调准尖头和水面倒影的位置,费时费力,还会带来很大的测量误差,在对补偿压力计进行测量时,同时将两台压力计进行平衡位置调准,在对标准压力计进行平衡调准时,被检压力计的平衡会发生改变,而当被检压力计平衡位置调准时,标准压力计的平衡也会被破坏,本技术方案中,先将装载腔体和固定容器内的页面保持一致,然后向单片机输入设定工作点,升降台带动移动容器部件移动相应的位移距离,位移传感器对移动容器部件的位置进行读数,获得实际的位移距离,然后向固定容器内通入压力气体,使得固定容器内的液体通过第一导管进入装载腔体内,发射器朝向反射体发射光线,接收器能够接收反射体反射的光线,通过对比反射体的两次位移之间的距离,计算出通入固定容器内的压力气体的实际压力值,从而达到减小测量误差的技术效果,并且,整个过程通过单片机进行控制,不需要人为手动对螺旋杆进行转动,同时,也不需要人眼观察进行度数,实现了全自动测量。
附图说明
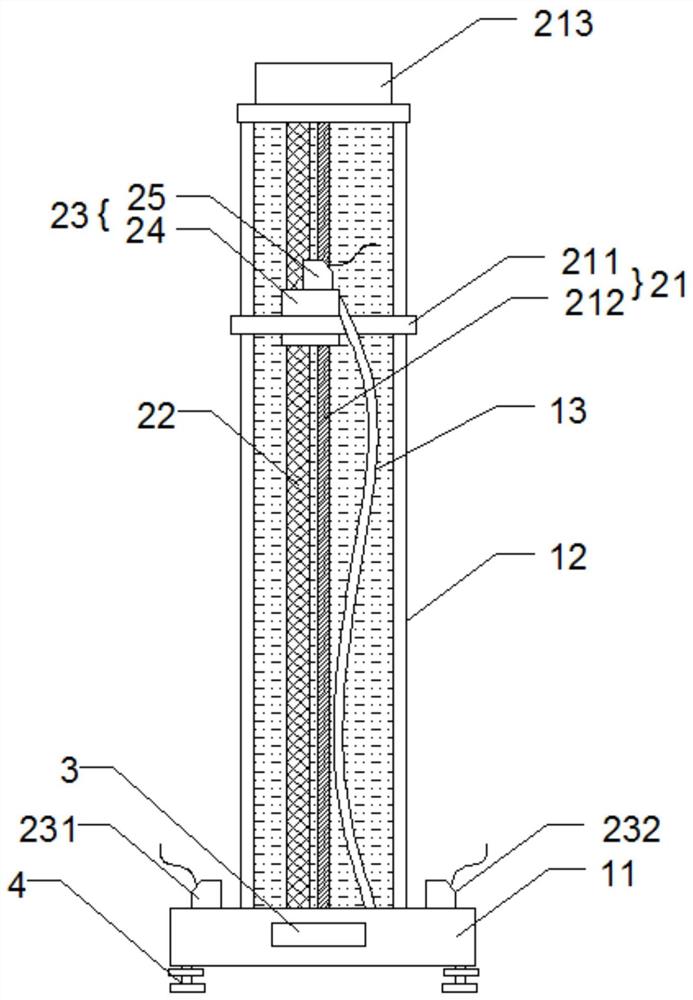
图1为本发明实施例提供的一种补偿微压计的结构示意图;
图2为本发明实施例提供的一种第一移动容器部件的结构示意图;
图3为本发明实施例提供的一种第一移动容器部件的使用状态结构示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。
如图1至图3所示,本发明实施例提供了一种补偿微压计,包括:
固定部件,固定部件包括底座11和固定容器12,固定容器12设置在底座11上,用于装载液体介质;
移动部件,移动部件包括升降部件21、位移传感器22和第一移动容器部件23,位移传感器22设置在底座11上,升降部件21包括升降台211和升降轨道212,升降轨道212设置在底座11上,升降台211设置在升降轨道212上,第一移动容器部件23设置在升降台211上,第一移动容器部件23包括激光位移部件25和反射部件24,激光位移部件25设置在反射部件24的上部,反射部件24包括稳定支架241、反射体242和装载腔体243,装载腔体243与固定容器12通过第一导管13相互连通,反射体242设置在装载腔体243内,稳定支架241活动连接于反射体242,激光位移部件25包括处理器251、发射器252和接收器253,处理器251分别连接于发射器252和接收器253,发射器252能够朝向反射体242发射光线,接收器253能够接收反射体242反射的光线。
本发明实施例提供的技术方案中,固定部件的作用是对固定容器12进行固定,固定部件包括底座11和固定容器12,固定容器12设置在底座11上,用于装载液体介质;移动部件的作用是通过第一移动容器部件23内的液位变化获得页面高度的变化,从而计算出压力差,移动部件包括升降部件21、位移传感器22和第一移动容器部件23,位移传感器22设置在底座11上,升降部件21包括升降台211和升降轨道212,升降轨道212设置在底座11上,升降台211设置在升降轨道212上,第一移动容器部件23设置在升降台211上,第一移动容器部件23包括激光位移部件25和反射部件24,激光位移部件25设置在反射部件24的上部,反射部件24包括稳定支架241、反射体242和装载腔体243,装载腔体243与固定容器12通过第一导管13相互连通,反射体242设置在装载腔体243内,稳定支架241活动连接于反射体242,激光位移部件25包括处理器251、发射器252和接收器253,处理器251分别连接于发射器252和接收器253,发射器252能够朝向反射体242发射光线,接收器253能够接收反射体242反射的光线,相对于现有技术,通过旋转一根带有刻度的螺杆来改变一个可动容器的位置,并通过观察容器中尖头和水面的倒影的位置使液面重新达到平衡位置,根据刻度对应的水柱高度差进行读数,压力工作点的设定必须通过手拨螺旋杆来进行,每转一圈仅提升2毫米,满量程2.5kPa约对应250毫米需转动125圈,既费力又会在频繁的转动中磨损螺杆,给读数带来误差,在读数时,必须非常仔细的调准尖头和水面倒影的位置,费时费力,还会带来很大的测量误差,在对补偿压力计进行测量时,同时将两台压力计进行平衡位置调准,在对标准压力计进行平衡调准时,被检压力计的平衡会发生改变,而当被检压力计平衡位置调准时,标准压力计的平衡也会被破坏,本技术方案中,先将装载腔体243和固定容器12内的页面保持一致,然后向单片机输入设定工作点,升降台211带动第一移动容器部件23移动相应的位移距离,位移传感器22对第一移动容器部件23的位置进行读数,获得实际的位移距离,然后向固定容器12内通入压力气体,使得固定容器12内的液体通过第一导管13进入装载腔体243内,发射器252朝向反射体242发射光线,接收器253能够接收反射体242反射的光线,通过对比反射体242的两次位移之间的距离,计算出通入固定容器12内的压力气体的实际压力值,从而达到减小测量误差的技术效果,并且,整个过程通过单片机进行控制,不需要人为手动对螺旋杆进行转动,同时,也不需要人眼观察进行度数,实现了全自动测量。
上述固定部件的作用是对固定容器12进行固定,固定部件包括底座11和固定容器12,固定容器12设置在底座11上,用于装载液体介质,固定容器12内装有液体,液体通常采用水,固定容器12设置在底座11上,底座11平放在桌面或者是地面上,并且,底座11的两端需要处于平行状态,因此,可以在底座11上设置水平仪,或者是在底座11的底部设置调平部件,方便对底座11进行调平;移动部件的作用是通过第一移动容器部件23内的液位变化获得页面高度的变化,从而计算出压力差,移动部件包括升降部件21、位移传感器22和第一移动容器部件23,位移传感器22设置在底座11上,位移传感器22采用光栅尺,光栅尺是利用光栅的光学原理工作的测量反馈装置,能够精确的测量第一移动容器部件23的位移距离,光栅尺属于现有设备,在此不再赘述,升降部件21包括升降台211和升降轨道212,升降轨道212设置在底座11上,升降台211设置在升降轨道212上,第一移动容器部件23设置在升降台211上,第一移动容器部件23包括激光位移部件25和反射部件24,激光位移部件25设置在反射部件24的上部,反射部件24包括稳定支架241、反射体242和装载腔体243,装载腔体243与固定容器12通过第一导管13相互连通,反射体242设置在装载腔体243内,稳定支架241活动连接于反射体242,激光位移部件25包括处理器251、发射器252和接收器253,处理器251分别连接于发射器252和接收器253,发射器252能够朝向反射体242发射光线,接收器253能够接收反射体242反射的光线,发射器252采用半导体激光发射器252,接收器253采用线性CCD阵列接收器253,处理器251采用现有的信号处理器251,首先,对设备进行零差压平衡调整,将第一移动容器部件23的液面和固定容器12的液面保持一致,并分别将光栅尺和激光位移计读数清零,通过计算机或者单片机向升降部件21输入一个设定工作点高度h,设定工作点高度h由第一移动容器部件23的液面和固定容器12的液面之间的高度差决定,然后计算机或者单片机通过压力输入装置向固定容器12内的液面表面输入一定量的压力气体,固定容器12内的液体通过第一导管13进入到装载腔体243内,使得装载腔体243内的液面升高,从而带动反射体242的位置升高,稳定支架241能够对反射体242的位置进行调整,使得反射体242只能够纵向移动,处理器251分别连接于发射器252和接收器253,发射器252能够朝向反射体242发射光线,接收器253能够接收反射体242反射的光线,在向固定容器12内通入压力气体之前,发射器252朝向反射体242发射光线,接收器253能够接收反射体242反射的光线,从而获得反射体242的起始位置,当在向固定容器12内通入压力气体之后,装载腔体243内的液面稳定后,发射器252朝向反射体242发射光线,接收器253能够接收反射体242反射的光线,从而获得反射体242的移动位置,发射器252获得起始位置与移动位置之间的移动距离,然后根据公式:
P=ρgh
其中,P为压力值;
ρ为液体的密度;
g为当地重力加速度;
h为相对高度;
计算出向固定容器12内的液面表面输入的压力气体的实际压力值。
进一步的,反射体242包括反射平台2421、漂浮台2422和活动架2423,漂浮台2422设置在装载腔体243内,活动架2423设置在漂浮台2422的两端,并且活动连接于稳定支架241,反射平台2421设置在漂浮台2422的中部,反射平台2421具有反射平面,用于反射光线。本实施例中,进一步限定了反射体242,反射体242需要保持水平放置,反射体242包括反射平台2421、漂浮台2422和活动架2423,漂浮台2422能够漂浮在装载腔体243内,漂浮台2422的两端设置活动架2423,活动架2423活动连接于稳定支架241,使得活动架2423能够在稳定支架241上纵向移动,反射平台2421设置在漂浮台2422上,并且,反射平台2421固定在漂浮台2422上,当固定容器12内的液体进入到装载腔体243内后,漂浮台2422可能会产生晃动,因此,当漂浮台2422以及装载腔体243内的液体稳定后,再通过激光位移部件25对反射平台2421的位置进行检测,从而达到方便获得反射平台2421的起始位置和移动位置的技术效果。
进一步的,稳定支架241具有第一凹口、第二凹口和透光孔2411,第一凹口和第二凹口设置在漂浮台2422的两端,活动架2423分别穿过第一凹口和第二凹口,透光孔2411设置在反射平台2421和激光位移部件25之间。本实施例中,进一步限定了稳定支架241,稳定支架241的两端具有第一凹口和第二凹口,活动架2423分别穿过第一凹口和第二凹口,第一凹口和第二凹口为长方形,并且是纵向设置的,使得第一凹口和第二凹口能够限制活动架2423的移动方向,从而使得活动架2423只能够沿着第一凹口和第二凹口的延伸方向进行纵向移动,透光孔2411设置在稳定支架241的中间位置,并且位于反射平台2421和激光位移部件25之间,使得激光位移部件25发射的光线能够照射在反射平台2421上,并且,反射平台2421能够将光线反射到接收器253上,不仅能够提高检测精度,还提高了适用性和方便性;可选的,激光位移部件25还包括第一透镜254,第一透镜254设置在接收器253的下部,第一透镜254通常采用凸透镜,能够将反射平台2421反射的光线聚集在接收器253上,从而达到聚集光线的技术效果;可选的,第二透镜255还设置在半导体激光发射器252的下部,能够将半导体激光发射器252发射的光线进行聚焦并照射在反射平台2421上。
需要说明的是,激光位移部件25采用光学三角法测量原理,将半导体激光发射器252射出的单色光,由第二透镜255聚焦到反射平台2421。反射光被第一收集,投射到线性CCD阵列接收器253上;信号处理器251通过三角函数计算线性CCD阵列接收器253上的光点位置得到距物体的距离,其测量不确定度小于7μ(k=2)测量范围为10mm。
进一步的,第二移动容器部件231和第三移动容器部件232分别固定连接于底座11,并且设置在固定容器12的两侧。本实施例中,增加了第二移动容器部件231和第三移动容器部件232,第二移动容器部件231和第三移动容器部件232分别固定连接于底座11,并且设置在固定容器12的两侧,第二移动容器部件231和第三移动容器部件232分别通过第二导管和第三导管进行连接,也就是说,第二移动容器部件231通过第二导管与固定容器12进行连接,第三动容器部件通过第三导管与固定容器12进行连接,第二移动容器部件231和第三移动容器部件232的作用是检测固定容器12的平衡位置是否产生变化,第二移动容器部件231和第三移动容器部件232的结构与第一移动容器部件的结构相同,在此不再赘述。
进一步的,升降部件21还包括驱动部件213,驱动部件213设置在固定容器12的顶部,驱动部件213的输出端连接于升降轨道212,用于驱动升降轨道212转动。本实施例中,进一步限定了升降部件21,驱动部件213的作用是驱动升降轨道212转动,从而带动升降台211和移动容器部件23纵向移动,从而达到驱动升降台211移动的技术效果;可选的,驱动部件213采用程序控制步进马达,升降轨道212采用滚珠丝杆,步进马达带动滚珠丝杆,使升降台211沿滚珠丝杆上下移动。升降轨道212与基座的垂直度必须小于2',升降轨道212的平行度必须小于0.02mm,升降轨道212的直线度必须小于0.01mm,这样升降台211在上下移动过程中能始终保持平台的水平位置,引入的测量不确定度小于3ppm。
进一步的,固定容器12的内壁表面覆盖防挂壁涂层。本实施例中,增加了防挂壁涂层,由于固定容器12的内壁具有一定的附着力,介质会附着在内壁上,由此产生挂壁现象,因此,在固定容器12的内壁设置防挂壁涂层,防挂壁涂层通常采用特氟龙涂层,能够减小液体分子间的内聚力,从而达到减小固定容器12内表面对介质的附着力的技术效果;可选的,装载腔体243的内壁上设置防挂壁涂层,从而达到减小装载腔体243内表面对介质的附着力的技术效果。
可选的,增加温度补偿装置,温度补偿装置分别设置在固定容器12、移动容器部件23和第一导管13内,能够对固定容器12、移动容器部件23和第一导管13内的环境温度进行温度监控和温度补偿,考虑到第一导管13中的液体在压力作用下的密度变化,压力计的压力复现计算式应为:
其中,Δp为加压口和参考口的压力差;
g
ρ(h)为介质密度在每一层面压力作用下的密度,是液柱高度的函数;
βt为介质密度的温度系数;
h
h
ΔT为偏离建立ρ(h)函数的温度差;
通过上述公式能够计算出加压口和参考口的压力差,从而提高检测的精确度。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 补偿微压计
- 补偿式微压计支撑装置