VR仿真冲浪系统
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及虚拟现实技术领域,尤其涉及一种VR仿真冲浪系统。
背景技术
现有解决仿真冲浪体验的方案,是一种固定在地面上,以弹簧、气囊等作为辅助支撑,使供人站立的平台,具有一定摆动功能的装置。
现有的模拟冲浪设备,是基于气囊或具有升降杆平台作为基座,利用气囊或升降杆,使冲浪板具有摇摆和上下波动的功能。
现有基于地面的模拟冲浪的装置,不能实现冲浪运动所需要的幅度较大的上、下、左、右的位置变化,体验效果差。
现有技术问题及思考:
如何解决模拟冲浪装置体验效果差的技术问题。
发明内容
本发明所要解决的技术问题是提供一种VR仿真冲浪系统,其通过控制器、柔索机器人和冲浪板等,实现模拟冲浪装置体验效果好。
为解决上述技术问题,本发明所采取的技术方案是:一种VR仿真冲浪系统包括柔索并联机器人和冲浪板,所述柔索并联机器人包括控制器和柔索传动单元,所述柔索传动单元包括立柱、柔索、设置在立柱上部的滑轮、设置在立柱下部一侧并依次连接的绳盘、减速机和电机,所述柔索的一端与绳盘连接,柔索的另一端向上绕经滑轮后向下与冲浪板连接,所述控制器与电机连接并通信,所述电机驱动减速机并带动绳盘转动配合,转动的绳盘带动柔索牵引冲浪板移动配合。
进一步的技术方案在于:并联的柔索传动单元形成柔索并联传动单元;所述柔索并联机器人为四柔索并联机器人,所述柔索传动单元的数量为四个,分别是结构相同的第一至第四柔索传动单元,四个并联的柔索传动单元形成四柔索并联传动单元,所述第一柔索传动单元包括第一立柱、第一柔索、设置在第一立柱上部的第一滑轮、设置在第一立柱下部一侧并依次连接的第一绳盘、第一减速机和第一电机。
进一步的技术方案在于:所述控制器为单片机或者计算机。
进一步的技术方案在于:还包括辅助支撑杆,所述辅助支撑杆与立柱连接并形成用于支撑冲浪板的支架。
进一步的技术方案在于:还包括设置在冲浪板上方的安全吊索。
进一步的技术方案在于:所述冲浪板为电子冲浪板,所述电子冲浪板与控制器连接并通信。
进一步的技术方案在于:所述电子冲浪板包括电阻膜层、压力传感器和平衡测量装置,所述电阻膜层经压力传感器与控制器连接并通信,所述平衡测量装置与控制器连接并通信。
进一步的技术方案在于:所述柔索并联机器人为三柔索并联机器人,所述柔索传动单元的数量为三个,三个并联的柔索传动单元形成三柔索并联传动单元;或者所述柔索并联机器人为五柔索并联机器人,所述柔索传动单元的数量为五个,五个并联的柔索传动单元形成五柔索并联传动单元;或者所述柔索并联机器人为六柔索并联机器人,所述柔索传动单元的数量为六个,六个并联的柔索传动单元形成六柔索并联传动单元。
进一步的技术方案在于:还包括VR眼镜,所述VR眼镜与控制器连接并通信。
进一步的技术方案在于:所述柔索为钢丝或者纤维制成的柔性的绳索。
采用上述技术方案所产生的有益效果在于:
第一,一种VR仿真冲浪系统包括柔索并联机器人和冲浪板,所述柔索并联机器人包括控制器和柔索传动单元,所述柔索传动单元包括立柱、柔索、设置在立柱上部的滑轮、设置在立柱下部一侧并依次连接的绳盘、减速机和电机,所述柔索的一端与绳盘连接,柔索的另一端向上绕经滑轮后向下与冲浪板连接,所述控制器与电机连接并通信,所述电机驱动减速机并带动绳盘转动配合,转动的绳盘带动柔索牵引冲浪板移动配合。该技术方案,其通过柔索并联机器人和冲浪板等,实现模拟冲浪装置体验效果好。
第二,并联的柔索传动单元形成柔索并联传动单元;所述柔索并联机器人为四柔索并联机器人,所述柔索传动单元的数量为四个,分别是结构相同的第一至第四柔索传动单元,四个并联的柔索传动单元形成四柔索并联传动单元,所述第一柔索传动单元包括第一立柱、第一柔索、设置在第一立柱上部的第一滑轮、设置在第一立柱下部一侧并依次连接的第一绳盘、第一减速机和第一电机。该技术方案,成本较低的情况下,结构较稳固,使用效果较佳。
第三,还包括辅助支撑杆,所述辅助支撑杆与立柱连接并形成用于支撑冲浪板的支架。该技术方案,结构更稳固,使用安全性更好。
第四,还包括设置在冲浪板上方的安全吊索。该技术方案,使用安全性更好,结构更合理。
第五,所述冲浪板为电子冲浪板,所述电子冲浪板与控制器连接并通信。该技术方案,在体验中,更方便判断体验者是否控制失败,结构更合理。
第六,还包括VR眼镜,所述VR眼镜与控制器连接并通信。该技术方案,体验效果更佳,结构更合理。
详见具体实施方式部分描述。
附图说明
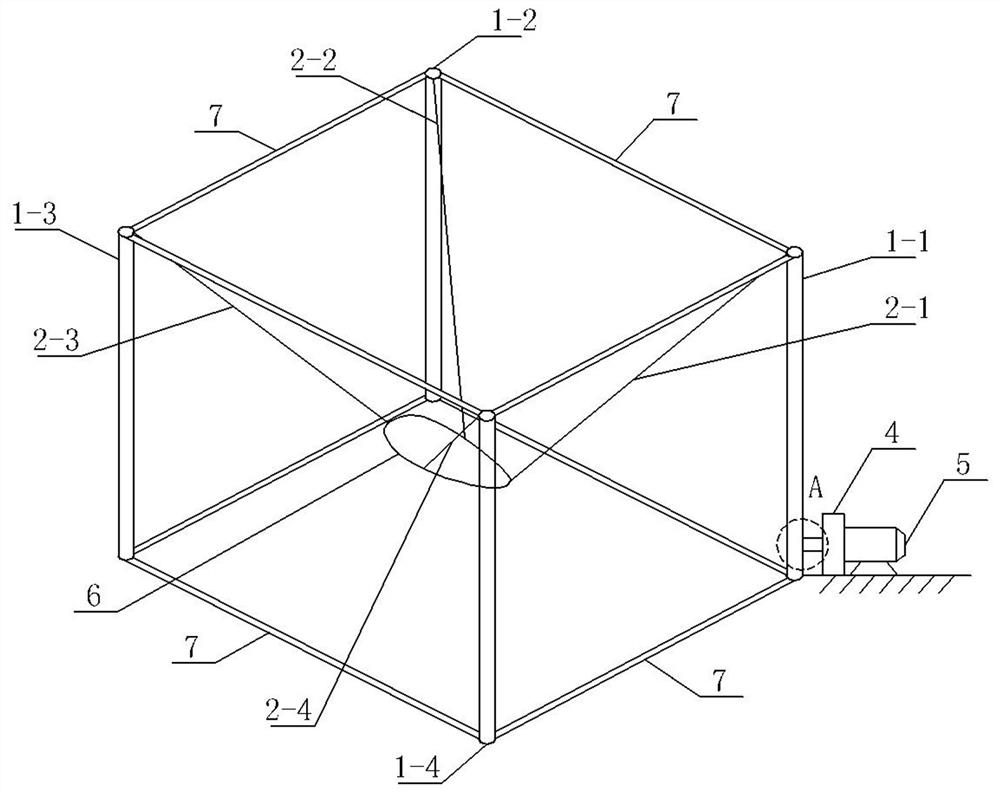
图1是本发明实施例1和实施例2的结构图;
图2是图1的A处放大图;
图3是本发明实施例1的原理框图;
图4是本发明实施例2中电子冲浪板的结构图;
图5是本发明实施例2的原理框图。
其中:1-1第一立柱、1-2第二立柱、1-3第三立柱、1-4第四立柱、2-1第一柔索、2-2第二柔索、2-3第三柔索、2-4第四柔索、3第一绳盘、4第一减速机、5第一电机、6冲浪板、7支撑杆、8电阻膜层、9电子陀螺仪。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本申请及其应用或使用的任何限制。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
在下面的描述中阐述了很多具体细节以便于充分理解本申请,但是本申请还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本申请内涵的情况下做类似推广,因此本申请不受下面公开的具体实施例的限制。
实施例1:
如图1~图3所示,本发明公开了一种VR仿真冲浪系统包括柔索并联机器人、冲浪板6和辅助支撑杆7,所述柔索并联机器人包括控制器和柔索传动单元,所述控制器为计算机,所述柔索并联机器人为四柔索并联机器人,所述柔索传动单元的数量为四个,分别是结构相同的第一至第四柔索传动单元,四个并联的柔索传动单元形成四柔索并联传动单元。
所述第一柔索传动单元包括第一立柱1-1、第一柔索2-1、固定在第一立柱1-1上部的第一滑轮、固定在第一立柱1-1下部一侧并依次连接的第一绳盘3、第一减速机4和第一电机5,所述第一柔索2-1的一端与第一绳盘3连接,第一柔索2-1的另一端向上绕经第一滑轮后向下与冲浪板6的前部连接,所述计算机的控制端口通过控制设备与第一电机5的控制端口有线连接并单向通信,所述第一电机5驱动第一减速机4并带动第一绳盘3转动配合,转动的第一绳盘3带动第一柔索2-1牵引冲浪板6的前部移动配合。
所述第二柔索传动单元包括第二立柱1-2、第二柔索2-2、固定在第二立柱1-2上部的第二滑轮、固定在第二立柱1-2下部一侧并依次连接的第二绳盘、第二减速机和第二电机,所述第二柔索2-2的一端与第二绳盘连接,第二柔索2-2的另一端向上绕经第二滑轮后向下与冲浪板6的左部连接,所述计算机的控制端口通过控制设备与第二电机的控制端口有线连接并单向通信,所述第二电机驱动第二减速机并带动第二绳盘转动配合,转动的第二绳盘带动第二柔索2-2牵引冲浪板6的左部移动配合。
所述第三柔索传动单元包括第三立柱1-3、第三柔索2-3、固定在第三立柱1-3上部的第三滑轮、固定在第三立柱1-3下部一侧并依次连接的第三绳盘、第三减速机和第三电机,所述第三柔索2-3的一端与第三绳盘连接,第三柔索2-3的另一端向上绕经第三滑轮后向下与冲浪板6的后部连接,所述计算机的控制端口通过控制设备与第三电机的控制端口有线连接并单向通信,所述第三电机驱动第三减速机并带动第三绳盘转动配合,转动的第三绳盘带动第三柔索2-3牵引冲浪板6的后部移动配合。
所述第四柔索传动单元包括第四立柱1-4、第四柔索2-4、固定在第四立柱1-4上部的第四滑轮、固定在第四立柱1-4下部一侧并依次连接的第四绳盘、第四减速机和第四电机,所述第四柔索2-4的一端与第四绳盘连接,第四柔索2-4的另一端向上绕经第四滑轮后向下与冲浪板6的右部连接,所述计算机的控制端口通过控制设备与第四电机的控制端口有线连接并单向通信,所述第四电机驱动第四减速机并带动第四绳盘转动配合,转动的第四绳盘带动第四柔索2-4牵引冲浪板6的右部移动配合。
所述辅助支撑杆7与四个立柱连接并形成用于支撑冲浪板6的支架。
所述柔索为钢丝制成的柔性的绳索。
其中,冲浪板为一般冲浪板即无电子器件的冲浪板,计算机、减速机和电机本身以及相应的通信连接技术为现有技术在此不再赘述。
柔索并联机器人将冲浪板6吊起,在计算机的系统控制下,由电机经过减速机,驱动柔索,从而带动冲浪板6在限定空间作移动,改变空间位置和姿态。
电机启动后,经过减速机,驱动绳盘,使柔索放开或收回。
实施例2:
实施例2与实施例1不同之处在于,还包括VR眼镜,所述冲浪板为电子冲浪板。
如图1、图4和图5所示,本发明公开了一种VR仿真冲浪系统包括实施例1的系统,还包括VR眼镜,所述VR眼镜与计算机无线连接并通信;所述冲浪板为电子冲浪板,所述电子冲浪板与计算机无线连接并通信。
其中,所述电子冲浪板包括压力传感器、电阻膜层8和电子陀螺仪9,计算机、VR眼镜、电子冲浪板、减速机和电机本身以及相应的通信连接技术为现有技术在此不再赘述。
在体验中,当冲浪板在运动,体验者需保持平衡时,足部会在电阻膜层8上产生不同的压差,此时电子陀螺仪9将记录此刻的平衡状态,判断是否控制失败。
实施例3:
实施例3与实施例1不同之处在于,所述柔索并联机器人为三柔索并联机器人,所述柔索传动单元的数量为三个,三个并联的柔索传动单元形成三柔索并联传动单元,三条柔索在冲浪板周边上均匀分布。
本申请的发明构思:
冲浪是在浪尖上的运动,现有基于地面的模拟冲浪的装置,不能实现冲浪运动所需要的幅度较大的上、下、左、右的位置变化。本发明中相互连接的柔索并联机器人和冲浪板,解决了该技术问题。
同时,现在模拟冲浪的装置没有提供对冲浪体验者姿态平衡的测量,故而不能很好的提供对运动参数的完整评价。本发明涉及的柔索并联机器人和传感器冲浪板,提供了对该问题的解决方案。
本发明是在柔索并联机器人技术的基础上,利用柔索牵引控制的设置有传感器的平台,在空中实现仿真冲浪运动的体验。
本发明采用柔索并联机器人和传感平台的结合。用柔索将传感平台吊起在空中,这样就能够实现对浪的柔性和多维度变化仿真。传感平台,在通用的冲浪板上设置有测量重心位移的传感模块和通讯模块,可以对体验者姿态进行测量,并上传到主控制器,从而对体验者的平衡进行评估,判断游戏是否失败。
技术方案说明:
1.本发明的主要特征在于柔索并联机器人和传感冲浪板的结合。
2. 如图2所示,柔索并联机器人由四根立柱、四条柔索(钢丝或纤维材料)、四台电机加减速机以及绳盘构成(这里的立柱和电机也都可以是三、五、六根和三、五、六台)。
3.该柔索的一端和冲浪板的周边相连,另一端则与绳盘相连,绳盘则与减速机轴连接。
4.冲浪板上设置有传感器,可以测量出体验者的姿态是否保持平衡。
5.在整个设施的上方,设置有安全保护索。
6.本发明运行的具体步骤包括:
6.1体验者站在冲浪板上,戴上(或不戴上)VR眼镜,系好安全吊索,提示体验游戏开始。
6.2由仿真游戏软件开始形成虚拟的波浪画面和实际的物理参数,柔索在控制电机的驱动下,牵引冲浪板随着“浪花”在运动。
6.3体验者努力保持平衡。电子冲浪板上装有电子陀螺仪和压力传感器,当体验者的重心超出冲浪板的物理重心时,游戏提示冲浪失败,体验者落水。
本申请保密运行一段时间后,现场技术人员反馈的有益之处在于:
本发明中,柔索并联机器人的柔索将冲浪板吊起来,比较逼真地模拟了冲浪的运动,实现冲浪运动的柔性变化特征和浮在“水面”的特点,解决了冲浪运动的柔性体验和多维度的运动变化,并可以对体验者的平衡状态进行评估,大大提高了对冲浪运动体验的真实感。
电子冲浪板的电子陀螺仪、压力传感器和电阻膜层,共同构成对冲浪板的平衡状态和人对冲浪板的控制力度的测量。电子陀螺仪和压力传感器,表明了冲浪板的现时状态;电阻膜层上的参数差,表明人对冲浪板的控制努力。
- VR仿真冲浪系统
- 基于VR逝者仿真的交互方法、系统、终端及VR设备