一种可以对机器人进行清理的基座及清理方法
文献发布时间:2023-06-19 09:35:27
技术领域
本发明涉及机器人自清洁领域,具体涉及一种可以对机器人进行清理的基座及清理方法。
背景技术
清洁机器人的机身表面往往粘有大量的灰尘,原因有大致如下:一是清洁机器人经常在家里的沙发或床底下进行清洁任务,而这些地方灰尘较多,虽然机器人把地板打扫干净了,但是很容易把机身弄脏;二是清洁机器人的基座一般是开放式的,在没有清洁任务的时候,机器人长时间停留在基座处容易积灰。如果没有及时清理清洁机器人机身的灰尘,它可能会在家里四处传播病菌、造成二次污染等,而且也影响观感。此外,粘上灰尘的摄像头或者其他传感器会影响清洁机器人的使用,比如影响建图的精度、影响障碍物的识别等。专利号为US6076226的一件于1997年申请的美国专利,公开了一种能够清理扫地机器人的封闭式基座,该基座能够自动吸取扫地机器人内部垃圾腔中的垃圾到基座的垃圾桶里,免去了用户需要频繁清理垃圾腔的麻烦,但是该专利并没有涉及到对扫地机器人机身进行清理的技术。类似的,专利号为CN207837484U的一项实用新型也公开发表了一种能够自动清理扫地机器人垃圾腔中垃圾的技术,同样没有涉及扫地机器人机身的清理。而专利号为CN105496316A和CN111466838A的两项专利则分别公开发表了对清洁机器人的滚刷和驱动轮进行清理的技术,同样没有涉及扫地机器人机身的清理。综上,现有技术中并没有涉及到对清洁机器人机身表面进行清理的技术,而如果不及时清理机器人机身表面的灰尘,会大大降低用户体验。
发明内容
为解决上述问题,本发明提供了一种可以对机器人进行清理的基座及清理方法,可以及时清理清洁机器人机身表面的灰尘,提高用户体验。本发明的具体技术方案如下:
一种可以对机器人进行清理的基座,所述基座包括控制模块、引导模块、清理部和垃圾收集部,其中,所述清理部包括清理仓,且有一可控制开闭的仓门,所述仓门关闭时将清理仓隔绝成一密闭清理空间;所述引导模块与所述控制模块连接,用于引导机器人进入清理仓;所述清理部还包括吹气系统,用于在执行清理任务时产生清理用的气流;所述清理部还包括吹气部件,其利用所述吹气系统产生的气流吹起位于密闭清理空间中的机器人表面的灰尘;所述垃圾收集部包括抽气系统,用于抽出密闭清理空间中被所述吹气部件吹起的灰尘;所述控制模块,用于控制所述清理部和所述抽气系统执行清理任务。本发明所述的一种基座,通过吹气系统产生的气流能够对机器人机身表面的灰尘进行清理,然后配合抽气系统将其自动抽送到垃圾收集桶中,减少了甚至免去了用户手动清理机器人的麻烦,大大提高了用户体验。
进一步地,所述抽气系统设置有若干个抽气端且每个抽气端均与清理仓连通;其中,一个抽气端设置于清理仓的底面,其端口处设置有橡胶圈;设置有橡胶圈的抽气端用于与机器人的垃圾输出口对接,其余的抽气端用于抽出清理仓中的灰尘。与机器人的垃圾输出口对接的抽气端设置的橡胶圈,可以提高接口处的密闭性,防止机器人垃圾腔中的垃圾散落,也对机器人的底盘起到一定的保护作用。
进一步地,所述吹气部件的底部设置有若干微小孔径的吹气孔。设置孔径较小的吹气孔,可以集中气流带走机器人表面的灰尘。
进一步地,所述吹气部件包括上吹气部件和侧吹气部件。不同位置的吹气部件可以对机器人的不同位置进行清理。
进一步地,所述清理部还设置有移动机构,所述移动机构包括上移动机构和侧移动机构;所述上移动机构包括一移动杆和一固定杆,用于带动上吹气部件移动,所述上吹气部件与移动杆连接,移动杆则与固定杆连接;所述侧移动机构包括一弧形固定杆,用于带动侧吹气部件移动,所述侧吹气部件与弧形固定杆连接。通过上移动机构的移动杆和固定杆的配合,可以带动上吹气部件遍历整个机器人的上表面并完成清理;通过侧移动机构的弧形固定杆,可以带动侧吹气部件绕除仓门位置外的机器人的侧面移动并完成清理。
进一步地,所述上吹气部件设置在清理仓上方,与同样设置在清理仓上方的上移动机构连接,用于清理机器人的上表面和侧面。通过上移动机构的移动杆和固定杆的配合,可以带动上吹气部件遍历整个机器人的上表面并完成清理,同时也能兼顾到侧面的清理。
进一步地,所述侧吹气部件设置在清理仓侧面,与同样设置在清理仓侧面的侧移动机构连接,用于清理机器人的侧面、上表面和下表面。通过侧移动机构的弧形固定杆,可以带动侧吹气部件绕除仓门位置外的机器人的侧面移动并完成清理,同时也能兼顾到上表面和下表面的清理。
一种对机器人进行清理的方法,所述方法包括如下步骤:S1,基座引导机器人进入清理仓中,随后将仓门关闭;S2,基座打开抽气系统,通过与清理仓连通的抽气端将清理仓中的空气排出;S3,基座打开吹气系统,为吹气部件提供气流,完成对机器人的清理;S4,基座关闭吹气系统,预设时间过后,再关闭抽气系统。本发明所述的一种方法,通过吹气系统产生的气流能够对机器人机身表面的灰尘进行清理,然后配合抽气系统将其自动抽送到垃圾收集桶中,减少了甚至免去了用户手动清理机器人的麻烦,大大提高了用户体验。
进一步地,所述步骤S3中,基座优先控制吹气系统给上吹气部件提供气流,并控制上移动机构带动上吹气部件在机器人上方做弓字形运动。采用弓字形运动的方式,可以细致地对机器人的机身上表面进行清理。
进一步地,所述步骤S3中,基座在控制上吹气部件完成对机器人上表面和侧面的清理后,控制吹气系统中止对上吹气部件提供气流,并对侧吹气部件提供气流;随后基座控制侧移动机构带动侧吹气部件绕机器人侧面做弧线运动。不采用给两个吹气部件同时提供气流的方式,可以避免因气流量过小而影响清理效果。
附图说明
图1为本发明一种实施例所述可以对机器人进行清理的基座的侧视图。
图2为本发明一种实施例所述吹气部件及其底部吹气孔的示意图。
具体实施方式
在下面的描述中阐述了很多具体细节以便于充分理解本申请。但是本申请能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本申请内涵的情况下做类似推广,因此本申请不受下面公开的具体实施的限制。
目前的机器人是智能家用电器的一种,能凭借一定的人工智能,在某些场合自动进行行走。机器人的机体上设有各种传感器,可检测行走距离、行走角度、机体状态和障碍物等,如碰到墙壁或其他障碍物,会自行转弯,并依不同的设定,而走不同的路线,有规划地行走。
下面结合附图对本发明的具体实施方式作进一步说明:
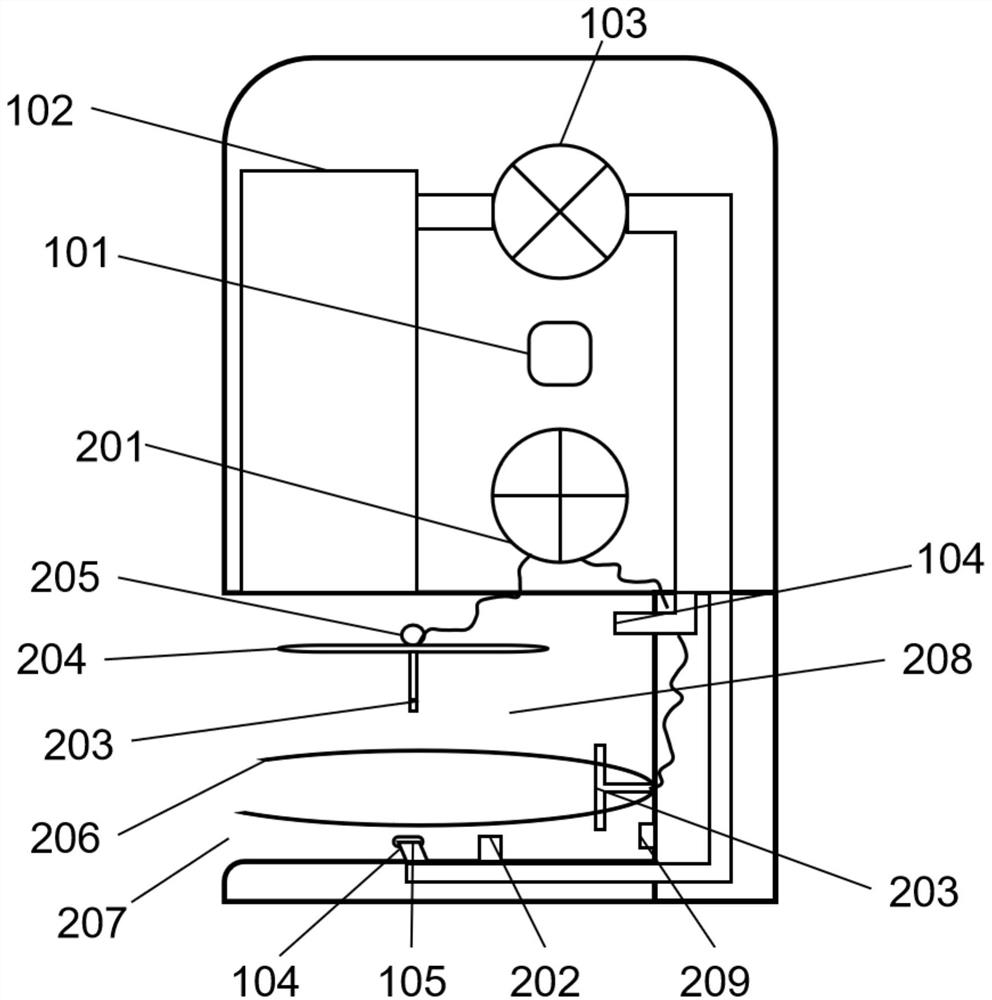
一种可以对机器人进行清理的基座,所述基座包括控制模块101、引导模块209、清理部和垃圾收集部。如图1所示,所述清理部包括清理仓208,且有一可控制开闭的仓门207,所述仓门207关闭时将清理仓208隔绝成一密闭清理空间;所述引导模块209与所述控制模块101连接,用于引导机器人进入清理仓208;所述清理部还包括吹气系统201,用于在执行清理任务时产生清理用的气流;所述清理部还包括吹气部件203,其利用所述吹气系统201产生的气流吹起位于密闭清理空间中的机器人表面的灰尘;所述垃圾收集部包括抽气系统103,用于抽出密闭清理空间中被所述吹气部件203吹起的灰尘;所述控制模块101,用于控制所述清理部和所述抽气系统103执行清理任务。本实施例所述的一种基座,通过吹气系统201产生的气流能够对机器人机身表面的灰尘进行清理,然后配合抽气系统103将其自动抽送到垃圾收集桶102中,减少了甚至免去了用户手动清理机器人的麻烦,大大提高了用户体验。
作为其中一种实施方式,所述抽气系统103设置有若干个抽气端104且每个抽气端104均与清理仓208连通;其中,一个抽气端104设置于清理仓208的底面,其端口处设置有橡胶圈105;设置有橡胶圈105的抽气端104用于与机器人的垃圾输出口对接,其余的抽气端104用于抽出清理仓208中的灰尘。本实施例所述的方法,与机器人的垃圾输出口对接的抽气端104设置的橡胶圈105,可以提高接口处的密闭性,防止机器人垃圾腔中的垃圾散落,也对机器人的底盘起到一定的保护作用。
作为其中一种实施方式,所述吹气部件203的底部设置有若干微小孔径的吹气孔213。本实施例所述的方法,设置孔径较小的吹气孔213,可以集中气流带走机器人表面的灰尘。
作为其中一种实施方式,所述吹气部件203包括上吹气部件和侧吹气部件。本实施例所述的方法,不同位置的吹气部件可以对机器人的不同位置进行清理。
作为其中一种实施方式,所述清理部还设置有移动机构,所述移动机构包括上移动机构和侧移动机构;所述上移动机构包括一移动杆204和一固定杆205,用于带动上吹气部件移动,所述上吹气部件与移动杆204连接,移动杆204则与固定杆205连接;所述侧移动机构包括一弧形固定杆206,用于带动侧吹气部件移动,所述侧吹气部件与弧形固定杆206连接。本实施例所述的方法,通过上移动机构的移动杆204和固定杆205的配合,可以带动上吹气部件遍历整个机器人的上表面并完成清理;通过侧移动机构的弧形固定杆206,可以带动侧吹气部件绕除仓门207位置外的机器人的侧面移动并完成清理。
作为其中一种实施方式,所述上吹气部件设置在清理仓208上方,与同样设置在清理仓208上方的上移动机构连接,用于清理机器人的上表面和侧面。本实施例所述的方法,通过上移动机构的移动杆204和固定杆205的配合,可以带动上吹气部件遍历整个机器人的上表面并完成清理,同时也能兼顾到侧面的清理。
作为其中一种实施方式,所述侧吹气部件设置在清理仓208侧面,与同样设置在清理仓208侧面的侧移动机构连接,用于清理机器人的侧面、上表面和下表面。本实施例所述的方法,通过侧移动机构的弧形固定杆206,可以带动侧吹气部件绕除仓门207位置外的机器人的侧面移动并完成清理,同时也能兼顾到上表面和下表面的清理。
一种对机器人进行清理的方法,所述方法包括如下步骤:S1,基座引导机器人进入清理仓208中,随后将仓门207关闭;S2,基座打开抽气系统103,通过与清理仓208连通的抽气端104将清理仓208中的空气排出;S3,基座打开吹气系统201,为吹气部件203提供气流,完成对机器人的清理;S4,基座关闭吹气系统201,预设时间过后,再关闭抽气系统103。本实施例所述的一种方法,通过吹气系统201产生的气流能够对机器人机身表面的灰尘进行清理,然后配合抽气系统103将其自动抽送到垃圾收集桶102中,减少了甚至免去了用户手动清理机器人的麻烦,大大提高了用户体验。
作为其中一种实施方式,所述步骤S3中,基座优先控制吹气系统201给上吹气部件提供气流,并控制上移动机构带动上吹气部件在机器人上方做弓字形运动。本实施例所述的方法,采用弓字形运动的方式,可以细致地对机器人的机身上表面进行清理。
作为其中一种实施方式,所述步骤S3中,基座在控制上吹气部件完成对机器人上表面和侧面的清理后,控制吹气系统中止对上吹气部件提供气流,并对侧吹气部件提供气流;随后基座控制侧移动机构带动侧吹气部件绕机器人侧面做弧线运动。本实施例所述的方法,不采用给两个吹气部件同时提供气流的方式,可以避免因气流量过小而影响清理效果。
结合图1,下面对本发明中所述基座清理机器人的过程进行详细地说明。
假设一台扫地机器人完成了屋子的清扫,正按预设程序返回基座中。扫地机器人经引导模块209的引导进入清理仓208中,将自身的充电接口对准了充电端202,随后停止移动,开始充电。引导模块209依靠自身发出的定位信号引导扫地机器人正确地到达指定位置,该信号可以是UWB定位技术、zigbee定位技术、wifi定位技术或者红外定位技术等技术所产生的定位信号,而扫地机器人上则是安装了相关定位技术所对应的元器件,用于搜寻引导模块209发出的定位信号。如果扫地机器人与基座的距离太远,无法检测到定位信号,则根据扫地机器人在清扫过程中所建立的地图,搜索到达基座的路径,然后导航至基座。靠近基座后,再根据定位信号,找到准确的位置,并导航进入基座的清理仓208中。
与此同时,扫地机器人的垃圾输出口也刚好对接了设置于清理仓208底部的抽气端104。所述垃圾输出口设置于扫地机器人的底部,其与扫地机器人内部的垃圾腔相连通,在扫地机器人正确地到达指定位置后,该垃圾输出口将会被打开,以使垃圾腔和抽气端104真正地连通在一起,这样抽气系统103才能通过抽气端104抽出扫地机器人垃圾腔中的垃圾。前述抽气端104的端口处设置有一橡胶圈105,可以增强接口处的密封性,防止扫地机器人垃圾腔中的垃圾散落在清理仓208中,同时也在一定程度上保护了扫地机器人的底座。然后,基座控制清理仓208的仓门207关闭,防止清理扫地机器人时产生的灰尘污染外界环境。而且封闭式的基座也可以保护扫地机器人在长时间不使用的情况下,不会因堆积太多灰尘而变得难以清理。当扫地机器人停留在基座中时,可以通过基座的控制面板或者相应的APP来控制扫地机器人出仓执行任务。仓门207关闭之后,基座利用控制模块101控制清理部和抽气系统103执行对扫地机器人的清理任务,即对扫地机器人内部垃圾腔中垃圾的清理和对扫地机器人机身表面灰尘的清理。用于控制该清理任务的控制模块101可以是STM32处理器或者ARM处理器等常用的处理器。控制模块101用于控制整个清理扫地机器人的过程,包括仓门207的关闭、抽气系统103和吹气系统201的开闭以及吹气部件203在移动机构上的移动等。
清理任务的具体实现过程如下:基座率先打开抽气系统103,通过设置有橡胶圈105的抽气端104抽取扫地机器人内部垃圾腔里的垃圾到基座的垃圾收集桶102中。同时,其余抽气端104也会开始抽吸清理仓208中的空气,可以在清理扫地机器人机身的灰尘之前形成空气流动。抽气端104的数量和位置不作限制,可以设置多个抽气端104,并且分布在清理仓208的上方或下方,以便更好地抽出清理仓208中漂浮的灰尘。
打开抽气系统103,在预设时间过后,基座打开吹气系统201,以产生气流清理扫地机器人机身表面的灰尘。吹气系统201首先给上吹气部件送气以清理扫地机器人的上表面和侧面,吹气系统201是通过较为柔软的细长管道将气体输送到吹气部件203处的,比如橡胶软管,这样方便吹气部件的移动。上吹气部件的起始位置位于扫地机器人外接四边形一个顶点的正上方。如图2所示,上吹气部件底部的中心与前述顶点相对,如此一来,当上吹气部件在所述外接四边形的边界上方移动时,将会有半个上吹气部件超出扫地机器人的上表面。这样设置的好处是可以兼顾对扫地机器人的侧面进行清理。如图2所示的上吹气部件有一长边和一短边,所述上吹气部件以与短边平行的方向在移动杆204上匀速移动,而移动杆204则以与长边平行的方向在固定杆205上移动。上吹气部件的移动过程,即清理过程如下:从起始位置出发,从移动杆204的一端匀速移动到另一端,然后停止。此时移动杆204会在固定杆205上移动半个所述上吹气部件长边的长度,然后移动杆204停止移动,上吹气部件继续在移动杆204上移动,直到到达另一端时停止。此时移动杆204又移动半个长边的长度,以此类推,上吹气部件将会在扫地机器人上方做弓字形运动。移动杆204每次只移动半个上吹气部件长边的长度,可以起到对同一表面清理两次的效果。
完成扫地机器人上表面的清理后,吹气系统201不再给上吹气部件送气,转为对侧吹气部件送气。侧吹气部件的位置如图1所示,其与弧形固定杆206连接,其送气范围略超过扫地机器人的上表面和下表面。如此设置,可以在清理扫地机器人侧面的同时,兼顾上表面和下表面的清理。在仓门207的位置,因没有设置移动机构,所以侧吹气部件并不是围绕扫地机器人做圆周运动的。但是这样不会影响对扫地机器人的清理,在侧吹气部件移动到弧形固定杆206的两端时,可以清理到扫地机器人与仓门207相对的侧面。
上述清理方法,兼顾到了扫地机器人整个机身表面,对于裸露在扫地机器人外的传感器,如摄像头和激光雷达等也可以起到清洁作用,提高了传感器的使用效果和寿命。在清理过程中,抽气系统103始终处于开启的状态,以便将漂浮在清理仓208中的灰尘及时通过抽气端104抽送到垃圾收集桶102中。在清理结束后,基座会先关闭吹气系统201,在预设时间过后,才关闭抽气系统103。
需要说明的是,对于前述的各方法实施例,为了简便描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本申请并不受所描述的动作顺序的限制,因为依据本申请,某些步骤可以采用其它顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和模块并不一定都是本申请所必须的。
以上公开的本申请实施例只是用于帮助阐述本申请,并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本申请的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本申请。本申请仅受权利要求书及其全部范围和等效物的限制。
- 一种可以对机器人进行清理的基座及清理方法
- 一种可以对高层建筑玻璃进行清理的软体机器人