一种自动扶梯主驱动轮状态监测系统及方法
文献发布时间:2023-06-19 10:10:17
技术领域
本发明属于自动扶梯监测技术领域,更具体地,涉及一种自动扶梯主驱动轮状态监测系统及方法。
背景技术
自动扶梯作为特种设备,担负着铁路以及城市轨道交通运输乘客的重要任务,其安全性至关重要。为保证乘客安全,减少事故的发生概率,需对自动扶梯进行定期检测与维修,从而保证设备处于良好的运行状态。然而,目前自动扶梯的检修主要采用人工周期修和故障修,即未出现故障时通过工作人员进行周期性检查,出现故障时再进行维修,此方式属于事后行为,无法有效预防故障的发生,不利于避免重大事故的发生;同时周期性的检修可能造成过度修或者维修不及时,导致耗费大量时间、人力、物力,效果不佳,运营的难度与成本较高。
自动扶梯主驱动轮是自动扶梯传递动力的部件,是自动扶梯的关键组成部分,对自动扶梯的运行安全至关重要。自动扶梯主驱动轮上分布有很多轮齿,其内部发生缺陷时很难通过人工检查出来,因此会遗留隐患,影响自动扶梯运行状态,对乘客的生命及财产安全产生威胁。磁场检测作为一种无损检测方法,可以被应用到自动扶梯主驱动轮的状态监测中去。目前,公开的专利中有关于磁场监测技术方面的,如,CN201910811217.3监测自动扶梯曳引钢带状态的电磁传感器及监测方法,该专利公开了一种通过电磁传感器检测主驱动轮带状态的方法,但是该专利所述为开环磁通量传感器,检测的精度低,并且只能检测主驱动轮带的一面,检测范围没有实现主驱动轮带的径向全覆盖,无法对主驱动轮带缺陷进行径向检测区域定位,该专利传感器中只有一组电磁铁模块,模块一旦发生故障就无法进行正常工作,传感器的可靠性较低。专利CN201910170006.6一种夹持式磁通量传感器及其使用方法,公开了一种通过夹持式的磁通量传感器检测已有结构中外露钢索的拉力,该专利只能检测一根钢索的内部拉力,并且无法定位检测点的位置,该专利传感器中只有一组电磁铁模块,模块一旦发生故障就无法进行正常工作,传感器的可靠性较低。
综上所述,现有的自动扶梯的监测存在以下不足:(1)一个电磁传感器只监测一个对象,检测的能力及范围较小;(2)开环传感器测量精度低,闭环传感器本身的维修无法拆解不方便;(3)E型的电磁传感器结构只能检测主驱动轮的一侧,无法实现被检测对象的全覆盖;(4)检测点缺陷的定位措施不足,无法准确定位缺陷的准确位置。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供了一种自动扶梯主驱动轮状态监测系统及方法,其对自动扶梯的主驱动轮进行监测,采集状态数据,用于故障分析、定位于预测,为自动扶梯的及时检修提供可靠的数据支持,为保障自动扶梯的运行安全提供有效的技术手段,能够准确定位缺陷位置、在线实时监测高可靠性、检测精度高、安装与检修方便的目的。
为实现上述目的,按照本发明的一个方面,提供了一种自动扶梯主驱动轮状态监测系统,其特征在于,包括夹持式电磁监测装置、角度定位装置和数据采集处理模块,其中:
所述夹持式电磁监测装置包括夹持支架和安装在该夹持支架上的三个电磁模块,该夹持支架具有作为主驱动轮转动通道的槽口;
对于每个所述电磁模块而言,其各自包括E型磁芯、激励线圈和两个感应线圈,所述E型磁芯包括轭部及从该轭部朝所述槽口的方向伸出的三根极臂,三根所述极臂分别为两根侧极臂和位于这两根侧极臂之间的中间极臂,所述中间极臂上安装所述激励线圈,每根所述侧极臂上分别安装一所述感应线圈,激励线圈发射的磁力线经过主驱动轮,再穿过两侧的感应线圈形成闭合回路,从而形成一个检测区域来检测磁通量;其中,E型磁芯被沿主驱动轮径向的平面截得的截面形状为E形;
这三个电磁模块依次布置在一矩形的三条边上,矩形的其中两条相对边上的电磁模块的轭部分别与所述主驱动轮的侧面平行,另一条边上的电磁模块的轭部与主驱动轮的中心线平行;
所述数据采集处理模块与各所述电磁模块的感应线圈分别连接,以通过各电磁模块测得的磁通量情况,对主驱动轮的缺陷进行检测;
所述角度定位装置安装在所述主驱动轮的旋转轴上,以通过所述主驱动轮的转动实现对所述主驱动轮的定位。
优选地,所述角度定位装置为编码器、陀螺仪或角度传感器。
优选地,所述数据采集处理模块包括现场采集装置和可与所述现场采集装置通信的远程监测终端,所述现场采集装置通过集成信号线分别与各所述电磁模块的感应线圈连接,所述远程监测终端对所述夹持式电磁监测装置采集的磁通量进行处理,按照不同电磁模块的检测区域进行分组,得到主驱动轮的断面的磁通量检测数据形成的断面点云图,通过异常的断面点云图分析判断对应检测区域内主驱动轮的状态,并定位缺陷在主驱动轮断面中所处的检测区域,从而获得缺陷在主驱动轮断面上的位置信息,远程监测终端还可根据角度定位装置的反馈获得缺陷在主驱动轮周向上的位置信息。
优选地,夹持式电磁监测装置还包括设置在夹持支架上的固定支架,所述固定支架安装在自动扶梯的桁架上,所述夹持式电磁监测装置设置在主驱动轮的边缘。
优选地,所述夹持式电磁监测装置设置有多个,并且它们沿着主驱动轮的周向布置。
优选地,所述E型磁芯上设置有安装凸台,以便于将所述E型磁芯安装在夹持支架上。
按照本发明的另一个方面,还提供了采用所述的自动扶梯主驱动轮状态监测系统的监测方法,其特征在于,包括以下步骤:
(1)所述夹持式电磁监测装置的各电磁模块分别采集对应检测区域内的磁通量,角度定位装置随着主驱动轮的运动采集主驱动轮的检测点沿主驱动轮周向的位置信息;
(2)采集得到磁通量及主驱动轮的检测点沿主驱动轮周向的位置信息并通过集成信号线上传至数据采集处理模块的现场采集装置;
(3)现场采集装置将接收的一台自动扶梯的主驱动轮的所有磁通量及主驱动轮的检测点沿主驱动轮周向的位置信息传输给数据采集处理模块的远程监测终端;
(4)远程监测终端对夹持式电磁监测装置采集的磁通量按照不同电磁模块的检测区域进行分组,并得到主驱动轮的断面的磁通量检测数据形成的断面点云图;
(5)远程监测终端筛选异常的断面点云图;
(6)远程监测终端对异常的断面点云图进行分析,首先对同一电磁模块的两个感应线圈采集到的磁通量进行对比,其次对不同电磁模块检测的磁通量进行对比,来分析判断主驱动轮的检测点的状态,具体如下:
远程监测终端通过对比,如果同一电磁模块的两个感应线圈采集到的磁通量不一致,则判定主驱动轮的该检测点有缺陷;
远程监测终端通过对比不同电磁模块检测的磁通量差异程度,来判断主驱动轮的该检测点缺陷的严重程度;
(7)远程监测终端生成主驱动轮的检测点的分析结果并附加有问题的主驱动轮部位所在断面的检测区域信息和沿主驱动轮周向的位置信息,定位缺陷在主驱动轮断面上的位置及沿主驱动轮周向的位置。
优选地,步骤(5)中,远程监测终端将异常的断面点云图与其对应的沿主驱动轮周向的位置信息合并保存,正常的断面点云图与其沿主驱动轮周向的位置信息不合并,分开压缩后保存,并在一段时间后自动删除。
优选地,还包括:(8)所述远程监测终端对分析得出的主驱动轮状态进行预警,并根据不良状态的严重程度分为多个层级,不同层级使用不同的方式进行预警。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
1)本发明提出了一种自动扶梯主驱动轮状态监测系统,该监测系统利用磁弹效应,通过夹持式电磁检测装置的三组电磁模块按照三个检测区域检测主驱动轮的磁通量变化,通过磁通量的变化来判断主驱动轮的缺陷,并定位出缺陷所在主驱动轮断面中的检测区域,通过角度定位装置来记录主驱动轮的检测点在主驱动轮径向的位置,结合检测区域定位与角度定位即可精确定位出缺陷在主驱动轮上的位置,实现缺陷在主驱动轮的断面和周向的位置的精确定位,为自动扶梯的及时检修提供可靠的数据支持,保障自动扶梯的运行安全。
2)本发明的一种自动扶梯主驱动轮状态监测系统,多个夹持式电磁模块组合成夹持式传感器装置,可靠性高,检测精度高,缺陷定位准确,可以同时主驱动轮不同位置进行监测,检测效率高,监测装置安装及维保方便,可以实现自动扶梯主驱动轮状态的有效监测,具有较好的应用前景和推广价值。
附图说明
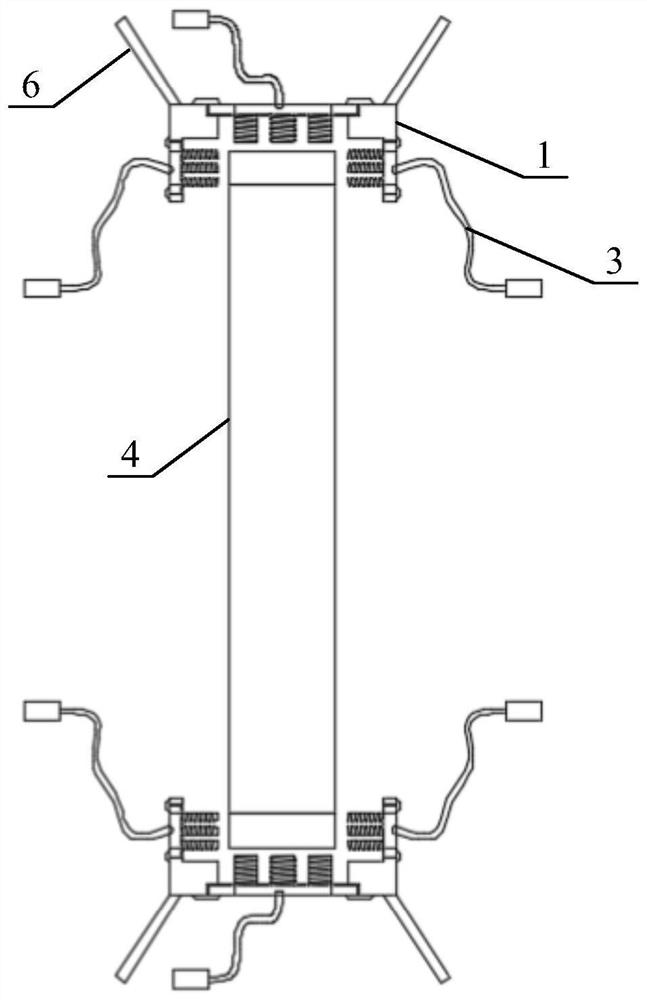
图1是本发明的一种自动扶梯主驱动轮状态监测系统监测主驱动轮时的示意图;
图2是本发明的一种自动扶梯主驱动轮状态监测系统监测时的截面示意图;
图3是本发明的一种自动扶梯主驱动轮状态监测系统监测时的爆炸示意图;
图4是本发明中其中一个电磁模块的结构示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
参照图1~图4,一种自动扶梯主驱动轮4状态监测系统,包括夹持式电磁监测装置1、角度定位装置2和数据采集处理模块,其中:
所述夹持式电磁监测装置1包括夹持支架104和安装在该夹持支架104上的三个电磁模块,该夹持支架104具有作为主驱动轮4转动通道的槽口;主驱动轮4可以穿过槽口,与夹持式电磁监测装置1之间留有空隙,两者无接触,不影响主驱动轮4运动,实现主驱动轮4不同径向位置的监测。
对于每个所述电磁模块而言,其各自包括E型磁芯11、激励线圈12和两个感应线圈13,所述E型磁芯11包括轭部111及从该轭部111朝所述槽口的方向伸出的三根极臂,三根所述极臂分别为两根侧极臂113和位于这两根侧极臂113之间的中间极臂112,所述中间极臂112上安装所述激励线圈12,每根所述侧极臂113上分别安装一所述感应线圈13,激励线圈12发射的磁力线经过主驱动轮4,再穿过两侧的感应线圈13形成闭合回路,从而形成一个检测区域来检测磁通量;其中,E型磁芯11被沿主驱动轮4径向的平面截得的截面形状为E形;优选地,所述E型磁芯11上可以设置有安装凸台14,以便于将所述E型磁芯11安装在夹持支架104上。
由于每个所述电磁模块的闭合回路分别形成一个检测区域,因此三个电磁模块可以形成三个检测区域,三个检测区域可以覆盖主驱动轮4的检测点。其中,主驱动轮4的检测点是主驱动轮4上被夹持式电磁监测装置1所检测的部位。
参照图2,这三个电磁模块依次布置在一矩形的三条边上;三个电磁模块分别为第一电磁模块101、第二电磁模块102和第三电磁模块103,它们通过固定扣锁105安装在夹持支架104的卡槽中。夹持支架104为一U形架,以便于这三个电磁模块的安装。矩形的其中两条相对边上的电磁模块(第二电磁模块102和第三电磁模块103)的轭部111分别与所述主驱动轮4的侧面平行,通过调整这两个电磁模块的大小,可以适应主驱动轮4的大小;另一条边上的电磁模块(第一电磁模块101)的轭部111与主驱动轮4的中心线平行;
所述数据采集处理模块与各所述电磁模块的感应线圈13分别连接,以通过各电磁模块测得的磁通量情况,分析梯级链的受力,以及对主驱动轮4的缺陷进行检测;
所述角度定位装置2安装在所述主驱动轮4的旋转轴上,以通过所述主驱动轮4的转动实现对所述主驱动轮4的定位,从而可以知道夹持式电磁监测装置1对应的检测点沿主驱动轮4周向的位置。角度定位装置2时刻记录主驱动轮4转动的角度,采集的角度数据用于定位检测点在主驱动轮4上的周向位置,以实现缺陷周向定位。优选地,所述角度定位装置2为编码器、陀螺仪或角度传感器。
进一步,所述数据采集处理模块包括现场采集装置和可与所述现场采集装置通信的远程监测终端,所述现场采集装置通过集成信号线3分别与各所述电磁模块的感应线圈13连接,所述远程监测终端对所述夹持式电磁监测装置1采集的磁通量进行处理,按照不同电磁模块的检测区域进行分组,得到主驱动轮4的断面的磁通量检测数据形成的断面点云图,通过异常的断面点云图分析判断对应检测区域内主驱动轮4的状态,并定位缺陷在主驱动轮4断面中所处的检测区域,从而获得缺陷在主驱动轮4断面上的位置信息,远程监测终端还可根据角度定位装置2的反馈获得缺陷在主驱动轮4周向上的位置信息,从而实现缺陷的精确定位,为自动扶梯的及时检修提供可靠的数据支持,保障自动扶梯的运行安全。
夹持式电磁监测装置1的电磁模块采用通用模块化设计,连接标准化的集成信号线3,集成信号线3通过标准化接头与现场采集装置连接,电磁模块出现故障时直接拔掉信号线接头进行整体更换,现场采集装置接收一台自动扶梯的所有主驱动轮4磁场数据,并进行初步处理,再通过5G等无线网络或有线方式传输给远程监测终端。
进一步,夹持式电磁监测装置1还包括设置在夹持支架104上的固定支架6,所述固定支架6安装在自动扶梯的桁架机房5的桁架上,所述夹持式电磁监测装置1设置在主驱动轮4的边缘。
进一步,参照图2,所述夹持式电磁监测装置1设置有多个,并且它们沿着主驱动轮的周向布置。它们分别单独分别进行监测,然后相互结合进行比较,从而提高监测的准确度。
按照本发明的另一个方面,还提供了采用所述的自动扶梯主驱动轮4状态监测系统的监测方法,包括以下步骤:
(1)所述夹持式电磁监测装置1的各电磁模块分别采集对应检测区域内的磁通量,角度定位装置2随着主驱动轮4的运动采集主驱动轮4的检测点沿主驱动轮4周向的位置信息;
(2)采集得到磁通量及主驱动轮4的检测点沿主驱动轮4周向的位置信息并通过集成信号线3上传至数据采集处理模块的现场采集装置;
(3)现场采集装置将接收的一台自动扶梯的主驱动轮4的所有磁通量及主驱动轮4的检测点沿主驱动轮4周向的位置信息传输给数据采集处理模块的远程监测终端;
(4)远程监测终端对夹持式电磁监测装置1采集的磁通量按照不同电磁模块的检测区域进行分组,并得到主驱动轮4的断面的磁通量检测数据形成的断面点云图;一个断面点云图是由主驱动轮4的同一部位的三个检测区域的磁通量检测数据形成,则沿着梯级链4的移动方向上有很多个断面点云图;
(5)远程监测终端筛选异常的断面点云图;其中,远程监测终端将异常的断面点云图与其对应的沿主驱动轮4周向的位置信息合并保存,正常的断面点云图与其沿主驱动轮4周向的位置信息不合并,分开压缩后保存,并在一段时间后自动删除;
(6)远程监测终端对异常的断面点云图进行分析,首先对同一电磁模块的两个感应线圈13采集到的磁通量进行对比,其次对不同电磁模块检测的磁通量进行对比,来分析判断主驱动轮4的检测点的状态,具体如下:
远程监测终端通过对比,如果同一电磁模块的两个感应线圈13采集到的磁通量不一致,则判定主驱动轮4的该检测点有缺陷,即可获得该电磁模块形成的检测区域对应检测的主驱动轮4的检测点存在缺陷;
远程监测终端通过对比不同电磁模块检测的磁通量差异程度,来判断主驱动轮4的该检测点缺陷的严重程度;
(7)远程监测终端生成主驱动轮4的检测点的分析结果并附加有问题的主驱动轮4部位所在断面的检测区域信息和沿主驱动轮4周向的位置信息,定位缺陷在主驱动轮4断面上的位置及沿主驱动轮4周向的位置;
(8)所述远程监测终端对分析得出的主驱动轮4状态进行预警,并根据不良状态的严重程度分为多个层级,不同层级使用不同的方式进行预警。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种自动扶梯主驱动轮状态监测系统及方法
- 一种自动扶梯主驱动吊装工装及操作方法