远程诊脉用脉象复现装置
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及医疗器械领域,具体说是一种远程诊脉用脉象复现装置,其主要适用于脉象的远程诊断。
背景技术
针对传统的中医诊脉的技术创新,传统中医理论来源于对医疗经验的总结及中国古代的阴阳五行思想。其内容包括精气学说、阴阳五行学说、气血津液、藏象、经络、体质、病因、发病、病机、治则、养生等,中医学理论体系是经过长期的临床实践,在唯物论和辨证法思想指导下逐步形成的,它来源于实践,反过来又指导实践。通过对现象的分析,以探求其内在机理。因此,中医学这一独特的理论体系有两个基本特点,一是整体观念,二是辨证论治。中医的基础理论是对人体生命活动和疾病变化规律的理论概括,它主要包括阴阳、五行、气血津液、脏象、经络、运气等学说,以及病因、病机、诊法、辨证、治则治法、预防、养生等内容。把脉又称为切脉,是中医师用手按病人的动脉,根据脉象,以了解疾病内在变化的诊断方法。切脉具有悠久的历史,它反映了中医学诊断疾病的特点和经验。脉象,可以理解为脉搏的形象。脉象是脉动应指的形象。脉象的产生与心脏的波动,心气的盛衰,脉道的通利和气血的盈亏直接相关。所以,心、脉是形成脉象的主要脏器。气血是形成脉象的物质基础。同时,血液循行脉道之中,流布全身,运行不息,除心脏的主导作用外,还必须有各脏器的协调配合:肺朝百脉,肺气敷布,血液放能布散;脾统血,为气血生化之源,血液靠脾气的充养和统摄得以运行;肝藏血,主疏泄以调节血量;肾藏精,精能生血,又能化气,肾气为各脏腑组织功能活动的原动力。故能反映全身脏腑、气血、阴阳的综合信息。当脏腑、气血发生病变后,必然从脉搏上表现出来,呈现病理脉象,成为诊断疾病的重要依据。
中医对脉象的辨识是依靠手指的感觉,诊脉时通过食指、中指、无名指在人体桡动脉的寸、关、尺三个脉位施加轻重不同的压力,实现不同的取脉方式,即浮取、中取、沉取。这三个部位的三种取法的组合可得到九种脉候,被称之为“九候“,三个部位加三种取脉手法被称为“三部九候”,中医根据脉象的动态特征将病脉细分为28种脉象。
现有技术中,对于脉象的诊断,在大多数情况下,仍旧依赖中医的诊断经验积累更偏重于定性,尚缺乏一种将脉象量化甚至可视化的技术方案。此外,由于传统中医理论主要基于“望闻问切”,则需要医患近距离接触才能获得相对准确的诊断结果,这严重制约了中医的出诊效率,也不利于中医诊断的推广普及。
发明内容
本发明的目的是提供一种远程诊脉用脉象复现装置,从根本上解决了上述问题,通过用户端采集脉诊信息,医护端实现高保真的再现,以基于云端的方式,实现远程交互式取脉,显著提高了医生远程取脉的灵活性、准确性,增强了医生的主动性,其具有结构简单紧凑、使用方便快捷等优点。
为实现上述目的,本发明提供了如下技术方案:该远程诊脉用脉象复现装置,其技术要点是:包括医护端结构组件和脉象发生组件,医护端结构组件包括相互配合的底座和外壳、限位在底座上的支架和散热片,脉象发生组件通过支架限位在外壳内。
进一步的,脉象发生组件包括弹性限位在支架上的弹簧片、设置在弹簧片上部的取脉压力传感器、平面位移传感器、设置在平面位移传感器上的脉诊触点、设置在弹簧片下部的电磁式脉象振动发生器;电磁式脉象振动发生器由下至上依次包括线圈支架、缠绕在线圈支架外的线圈、套限在线圈支架内的内铁芯、设置在内铁芯上的永磁体、套限在线圈外的外铁芯。
本发明的有益效果:整体技术方案上:本发明基于云计算服务器实现用户数据的存储,通过人工智能算法进行大数据分析,建立综合的中医诊疗方案。通过用户端、医护端之间的远程通讯配合使用,用户端采集脉诊信息,数据交互系统存储标准化数据,并上传至云端,再由云端传输至医护端,从而实现高保真复现。远程交互控制很好的解决了医生远程取脉的灵活性、准确性,同时也增强了医生的主动性,医生作为整个反馈系统的一部分,由医生通过指下的振动感知进行相应的调节动作。
用户端:主要包括三组独立的脉象采集装置,采用霍尼韦尔微型触力传感器,分别对应尺、关、寸三部分,各采集装置具有独立的XYZ微位移功能,分别由步进减速电机驱动,并具有直滑电位器来拾取位置反馈信息。即传感器可在脉位范围内做位置调整,完成寻脉过程,这个过程完全由远端的医护端医生手指的移动来实现控制。用户端还具备采集装置的整体移动、实现大的位移调整及左右手互换功能。用户端采集的脉象数据通过蓝牙发送至用户的智能手机端,对数据进行处理,同时还具备音视频连接功能,可通过无线网络与医护端连接,实现远程语音视频同步传送。
寸关尺脉象独立采集:通过三套独立的采集装置,每套采集装置由三套步进电机驱动,实现xyz方向的微位移控制,与脉诊仪医护端实现远程交互控制,医护端的摇杆电位器具有两个方向的电位计组成,电位计两端接参考电源,滑动端随着位移的变化输出不同的电压值,这个电压值与位置参数具有对应关系,用户端的三轴移动完全取决于医护端的位置传感器,以实现寻脉动作。z轴的动作来自医护端的取脉压力传感器,传感器的压力值控制用户端z轴的取脉压力。
步进减速电机优选GM15BY永磁微型直流无刷步进齿轮减速电机,电机的输出端设有螺杆,螺杆旋转带动螺母往复运动,实现各轴的移动控制。
脉象采集压力传感器:优选采用FSS1500NST霍尼韦尔小型触力传感器,量程为0~1500PSI,灵敏度为:0.12mv/g三只脉象采集传感器分别采集寸关尺部的脉象信号。
位置传感器优选采用小型直滑贴片电位器,电位器的滑动端与各轴的滑块连接,实现同步运动,以获取位置信息。
结合用户端的脉象采集组件,在有经验的中医指导下,将中医理论中的各种脉象(例如,浮脉、沉脉、迟脉、数脉等十二种常见脉象)与实际数据相匹配,从而方便中医教学。例如,建立三个尺、关、寸三个部位的函数,以时间t为横轴,在采集装置在z向上的波动幅度p为纵轴,可得到p = f(t)的三条关系函数曲线,从而将中医理论中的脉象作为标准化数据记录,便于远程传输与复现。
医护端:主要包括三组独立的脉象复现装置,分别对应尺、关、寸三部分,各复现装置具有独立的脉象仿真功能,每组装置具有位置传感器及取脉压力传感器,即医生的三根手指放置在装置上,医生除了能感知用户端用户的脉象振动信息,也可以由医生的手指来主动的控制用户端的传感器位置及取脉压力大小,每组装置上具有平面位移传感器和取脉压力传感器,医生通过手指的移动来带动平面位移传感器移动,传感器检测的位置信息传输至用户端,控制各传感器的位置。医生通过手指按压的力度控制,通过取脉压力传感器采集,控制用户端做相应的取脉压力调整,实现医护端与用户端的远程交互控制,医生作为交互控制环节的一部分,医生既能感知脉象信号的有无、强弱,也可通过手指的移动,增加了搜索范围,使医生远程诊脉变为主动,医生获取的信息量也加强了。通过设置在位移传感器下方的取脉压力传感器,拾取医生的取脉压力信息,这些信息通过远程传输给用户端,控制用户端的取脉传感器的位置移动及取脉压力。
远程交互系统:用户端与医护端之间不仅具备语音视频的交流互动,使医生了解患者的情况,医生还具备远程诊脉控制的能力,使医生具有主动寻脉、变化手法等多项操作,大大增强了医生的诊脉手感。
通过将用户端采集的脉象信息数据化,由于采集过程中的振动信号始终以时间线为横轴,因此可将数据化的标准信息转化为以时间为横轴的三条部分重叠的波形曲线,从而实现可视化。进一步的,还可在中医的配合下,将相应的脉象波形曲线进行归类,并在脉象诊断过程中逐渐完善数据体系,最终建立脉象数据库。一方面,可在教学过程中,从数据库中快速调取并复现相应的脉象;另一方面,可进一步结合图像识别功能,自动定位患者手腕穴位的位置,实现自动寻脉,在脉象采集装置获取脉象信息后自动与数据库中的脉象信息进行匹配,从而实现自动诊断的目的。
基于智能手机平台,随着技术的发展,手机作为物联网智能终端是大的趋势,手机不仅仅是完成语音、视频图像、数据传输,还可以完成账号申请、支付、管理等。通过仿生脉诊APP程序软件来完成用户账号注册申请、用户管理、VIP管理、订制服务、专家预约等功能。
附图说明
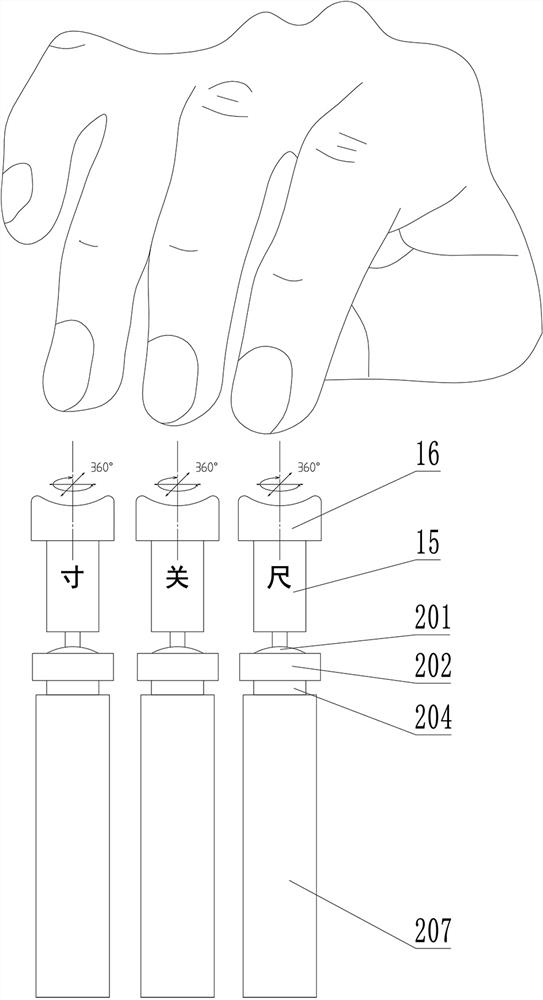
图1为本发明医护端的使用状态参考图。
图2为本发明医护端的爆炸结构示意图。
图3为本发明医护端脉象反馈组件的爆炸结构示意图。
图4为本发明医护端的俯视结构示意图。
图4a为图4沿A-A线的剖视结构示意图。
图4b为图4沿B-B线的剖视结构示意图。
图5为本发明医护端的电路结构示意图。
图6为本发明用户端的使用状态参考图。
图7为本发明用户端的侧视结构示意图。
图7a为图7的剖视结构示意图I。
图7b为图7的剖视结构示意图II。
图7c为图7的剖视结构示意图III。
图8为本发明的通讯原理示意图。
具体实施方式
以下结合图1~8,通过具体实施例详细说明本发明的内容。
实施例1
本实施例用于阐述医护端的脉象复现装置A的具体结构。脉象复现装置A包括医护端结构组件1和脉象发生组件2,医护端结构组件1包括相互配合的底座11和外壳12、限位在底座11上的PCB板14、支架13和设有散热风扇171的散热片17,脉象发生组件2通过支架13限位在外壳12内。脉象发生组件2包括弹性限位在支架13上的弹簧片206、设置在弹簧片206上部的取脉压力传感器204、平面位移传感器202、设置在平面位移传感器202上的脉诊触点201、设置在弹簧片206下部的电磁式脉象振动发生器205;电磁式脉象振动发生器205由下至上依次包括线圈支架211、缠绕在线圈支架211外的线圈210、套限在线圈支架211内的内铁芯209、设置在内铁芯209上的永磁体208、套限在线圈210外的外铁芯207。优选的,脉诊触点201上还可通过连杆15设置柔性指托16,使其触感更接近人体腕部。
平面位移传感器202采用摇杆电位器,如JS20型号,内部具有横向和纵向两个方向的电位计,可以在一定得平面坐标内读取XY坐标位置。
取脉压力传感器204:采用小型柱形称重传感器,如型号为:DYZ-100-0-0.5Kg,最大量程500g,中医取脉压力大约为250g左右。
弹簧片206:弹簧片206有高锰钢薄片激光切割一定得形状,其弹性特性与悬挂物的质量决定了弹性悬挂系统的固有频率,调节固有频率接近脉象振动的频率范围,可提高系统的工作效率。
电磁式脉象振动发生器205:由圆筒形磁环及线圈210组成,选择线圈210固定,磁环固定于悬挂系统上是为了利用磁环的质量大,可以降低悬挂系统的共振频率,也避免了线圈210引线运动折断的发生。线圈支架211由铝合金材料制成,强度高,导热性良好,由于线圈210体积小功率大,线圈210很容易发热,所以需要将铝骨架下面放置铝制散热片17,以便迅速将热量散发掉。其工作原理类似扬声器的原理,可以把脉象振动信号理解为音频信号,电磁脉象振动仿真器恰恰类似扬声器,将声音信号进行高保真的还原,人的脉象振动频率大致在0.1~40Hz的频率范围,电磁脉象振动仿真器由两片弹簧片支撑的弹性悬挂系统,调节整个弹性系统的共振频率接近脉象振动频率,使工作效率提高,电磁式脉象振动仿真器由音频功率放大器进行推动,产生的脉象振动传到至脉诊接触点,医生手指的指腹刚好接触到这个振动点,即可感知脉象的振动,依据中医寸口脉为寸关尺,所以系统采用三套同样的独立的装置,实现寸关尺同步独立采集再现,实现远程诊脉。
根据共振频率计算公式:
可以得出弹性悬挂系统的共振频率与系统弹性系数及质量有关系,质量越大共振频率越低,通过弹性系数和质量的控制调整,使系统的共振频率接近20Hz,这样会提供系统的工作效率。
实施例2
本实施例用于阐述用户端的具体结构。脉象采集装置B包括“半龙门形”的壳体组件(附图未标记)、位于壳体组件上半部的驱动平台组件4、设置在驱动平台组件4被驱动端的采集指组件5、设置在壳体组件下部的腕托组件6。其中,腕托组件6包括腕托电机62、互换控制电机63、设置在互换控制电机63输出端的腕托61。在互换控制电机63的驱动下,可实时调整腕托61的位置。驱动平台组件4包括x向驱动组件41、y向驱动组件42、z向驱动组件43,采集指组件5设置在z向驱动组件43上。采集指组件5由上至下主要包括固定在z向滑块433上的结构件(附图未标记)、固定在该结构件上的PCB板51、位于PCB板51上的脉象压力传感器52、与脉象压力传感器52配合的顶杆53、设置在顶杆53上的仿生指54。为避免相对硬质的信号采集端顶杆53直接接触穴位造成的硬质感,并提高患者的依从性,在顶杆53上设置了柔性的仿生指54,例如采用硅胶等柔性材料。
x向驱动组件41包括x向电机411、与x向电机411输出端螺杆平行设置的x向导杆414、设置在x向电机411输出端且限位在x向导杆414上的x向滑块413、与x向滑块413配合的x向位置反馈电位器412、设置在x向滑块413上的导向架415。作为优选的,其设置方式可采用图7c的方式,将三个x向电机411分设在两侧,将相配合的x向导杆414设置在x向电机411内侧,分别将各x向滑块413两端分别设置在相应的x向滑块413和x向电机411的输出端螺杆上,从而在x向电机411运转时,驱动各x向滑块413沿x向平移,并通过x向位置反馈电位器412实时定位各x向滑块413的位置。
y向驱动组件42包括y向电机421、设置在y向电机421输出端的y向滑块423、与y向电机421配合的y向位置反馈电位器422;
z向驱动组件43包括限位在x向滑块413上的z向电机431、设置在z向电机431输出端的z向滑块433、与z向滑块433配合的z向位置开关432。
如图7a~图7c所示,x向滑块413x向滑块413、y向滑块423y向滑块423以及z向滑块433z向滑块433之间的配合结构的其中一种实施方式。以x向为主驱动方向,由于需要同时承载y向、z向所需的全部组件的重量(主要包括x向驱动组件41采集指组件5、y向电机421、y向滑块423、z向电机431、z向位置开关432、采集指组件5等),而设置了x向导杆414,避免x向电机411的输出端螺杆承担全部重量。为避免x向滑块413、y向滑块423之间的滑动干涉,而设置了x向驱动组件41采集指组件5,将x向驱动组件41采集指组件5固定在x向滑块413上,将y向电机421固定在x向驱动组件41采集指组件5上,将位于y向电机421输出端的y向滑块423滑动配合在x向滑块413内。从而实现在x向滑块413滑动的同时带动y向驱动组件42的各组件沿x向滑动。
当接收到来自医护端的平移驱动信号时,通过x向驱动组件41、y向驱动组件42以及腕托组件6调整采集指组件5相对于用户手臂寸关尺穴的相对位置。具体而言,当收到驱动信号后,各x向电机411驱动其输出端螺杆进而带动相应的x向滑块413沿x向平移,各y向驱动组件421驱动其输出端相应的y向驱动组件423沿y向平移,在xy方向的合力调节下,将采集指组件5定位在手腕的寸关尺穴的正上方。控制方式上,xy方向可按照先后调整的方式进行,也可以同时进行。
xy平面调整到位后,各z向电机431驱动其输出端相应的z向滑块433沿z向升降,z向滑块433带动采集指组件5向下平移,将采集指组件54抵靠在手腕的寸关尺穴上,通过z向滑块433设定采集指组件51前端的顶杆53的采集深度,避免采集指组件51沿z轴无限制向下平移损伤患者。即,当到达指定z向深度后,即使受到医护端的z向向下的平移信号,z向电机431也不会产生驱动动作。
z向深度调整到位后,位于PCB板51末端的顶杆53实时接收穴位处反馈的节律性振动信号(即脉象信号),并这振动信号通过脉象压力传感器52转化为电信号后,继续通过无线通讯的方式将数据传输至手机端或云服务器,最终实现脉象的采集。
实施例3
本实施例用于阐述医护端与用户端之间的通讯方案,远程诊脉用脉象复现装置包括脉象采集装置B和脉象复现装置A,脉象采集装置B通过无线网络将脉象数据传输至脉象复现装置A,脉象复现装置A通过无线网络将控制信号传输至脉象采集装置B。脉象复现装置A或脉象采集装置B通过蓝牙系统与智能手机实现数据传输。
医护端控制电路组件3包括功率放大器31、蓝牙模块32、控制器模块33。其中,控制器模块33,可选用STM32F205VGT6。
医护端→用户端的控制信号传递。
使用时,医护端通过远程交互控制用户端,医护端的平移信号通过5G通讯网络传导至用户端,以实现低延时调控,具体而言,医生先通过整体调节摇杆34进行大范围调整,定位手腕位置后,通过手指驱动脉诊触点201在XY平面内的平移,带动平面位移传感器202端部位移。医护端位于医生指下设有平面位移传感器202,医生可通过移动手指带动位置传感器移动,传感器得到位置信息,位移传感器下方还设取脉压力传感器204,拾取医生的取脉压力信息,这些信息通过远程传输给用户端,控制用户端的取脉传感器的位置移动及取脉压力。即,通过先“粗调”后“细调”的方式完成寻脉。
用户端→医护端的脉象数据传递。
患者的脉搏经过用户端的采集指最终转化为医护端的脉象发生组件2脉象发生组件2在z向上的振动。具体而言,脉冲电流经过线圈210时,将电信号转化为z向上的电磁力,并带动永磁体208和内铁芯209发生z向振动,振动依次经过外铁芯207、弹簧片206、取脉压力传感器204最终传导至脉诊触点201。
附图中的xyz坐标系仅为一种相对方向的坐标示意,并非各技术方案中的唯一自由度坐标系。
附图标记说明:
A 脉象复现装置
B 脉象采集装置
1 医护端结构组件
11 底座、12 外壳、13 支架、14 PCB板、15 连杆、16 柔性指托、17散热片、171散热风扇
2 脉象发生组件
201 脉诊触点、202 平面位移传感器、203 PCB板、204 取脉压力传感器、205 电磁式脉象振动发生器、206 弹簧片、207 外铁芯、208 永磁体、209 内铁芯、210 线圈、211 线圈支架
3 医护端控制电路组件
31 功率放大器、32 蓝牙模块、33 控制器模块、34 整体调节摇杆
4 驱动平台组件
41 x向驱动组件、411 x向电机、412 x向位置反馈电位器、413 x向滑块、414 x向导杆、415 导向架
42 y向驱动组件、421 y向电机、422 y向位置反馈电位器、423 y向滑块
43 z向驱动组件、431 z向电机、432 z向位置开关、433 z向滑块
5 采集指组件
51 PCB板、52 脉象压力传感器、53 顶杆、54 仿生指
6 腕托组件
61 腕托、62 腕托电机、63 互换控制电机。
- 远程诊脉用脉象复现装置
- 一种采集和模拟脉象的远程诊脉装置、远程中医诊断系统