一种双工位自动化视觉分拣机构
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及机械传动领域,具体涉及一种双工位自动化视觉分拣机构。
背景技术
在现有生产中,常常需要大量分拣批量产品,人工操作需要进行辨别和进行搬运,人工成本大,整体排放时间长,基于此思路,我们设计出一种双工位自动化视觉分拣机构,利用了X和Y轴直线电机的高速、高精度优势,缩小了工件取放的时间,提高了抓取效率。
发明内容
本发明解决的技术问题是提供一种双工位自动化视觉分拣机构。
本发明解决其技术问题所采用的技术方案是:一种双工位自动化视觉分拣机构,包括底座,所述底座上设置有立柱,所述立柱上设置有横梁,所述横梁侧面固定有X轴直线模组,所述底座上并排间隔设置第一Y轴直线电机模组、第二Y轴直线电机模组和视觉镜头,所述第一Y轴直线电机模组和第二Y轴直线电机模组上分别设置有第一Y轴载具平台和第二Y轴载具平台,所述X轴直线模组上设置有X轴移动平台,所述X轴移动平台上固定有Z轴模组,所述Z轴模组的驱动轴连接有Z轴移动平台,所述Z轴移动平台上连接有可与第一Y轴载具平台和第二Y轴载具平台配合的夹爪机构。
进一步的是,所述第一Y轴载具平台和第二Y轴载具平台结构相同,所述第一Y轴载具平台包括第一Y轴直线导轨副和用于驱动直线导轨副的第一动力机构,所述第一Y轴直线导轨副的驱动块上部与第一Y轴载具平台固定。
进一步的是,所述X轴直线模组包括X轴直线导轨副和用于驱动X轴直线导轨副的第二动力机构,所述X轴直线导轨副的驱动块和X轴移动平台固定连接。
进一步的是,所述Z轴直线模组包括Z轴滚珠丝杠副和用于驱动Z轴滚珠丝杠副的第三动力机构,所述Z轴移动平台和Z轴滚珠丝杠副的滑块固定。
进一步的是,所述视觉镜头一侧还设置有用于照明的光源。
进一步的是,所述Z轴移动平台上设置有第四动力机构,所述第四动力机构传动连接花键,所述花键与夹爪机构传动连接。
本发明的有益效果是:设备运行时打开视觉镜头,通过视觉镜头对第一Y轴载具平台上的工件进行检验,合格后的工件能够被选择,受三轴联动的夹爪能够夹取合格的工件将其移动到第二Y轴载具平台上,本发明充分利用了X和Y轴直线电机的高速、高精度优势,缩小了工件取放的时间,提高了抓取效率,而且在取放动作流程之间,增加了视觉判断,从而自动筛选判别,缩短了整体取放时间,提高了效率,也不需要人工进行挑拣,减少人力成本。
附图说明
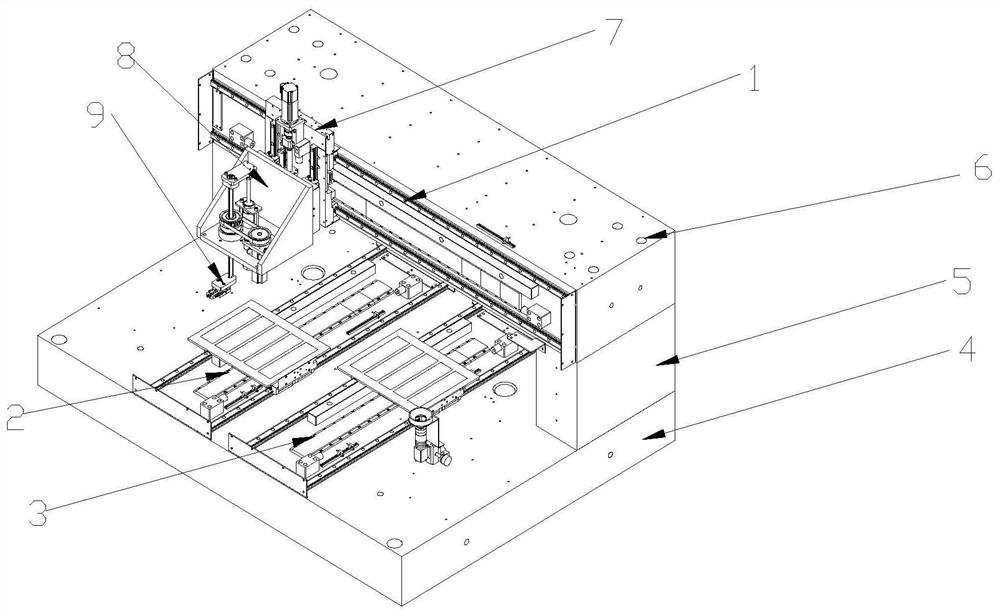
图1为双工位自动化视觉分拣机构的结构图;
图中标记为:1、X轴直线模组;2、第一Y轴直线电机模组;3、第二Y轴直线电机模组;4、底座;5、立柱;6、横梁;7、Z轴模组;8、Z轴移动平台;9、夹爪机构;
具体实施方式
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
如图1所示的一种双工位自动化视觉分拣机构,包括底座4,所述底座4上设置有立柱5,所述立柱5上设置有横梁6,所述横梁6侧面固定有X轴直线模组1,所述底座4上并排间隔设置第一Y轴直线电机模组2、第二Y轴直线电机模组3和视觉镜头,所述第一Y轴直线电机模组2和第二Y轴直线电机模组3上分别设置有第一Y轴载具平台和第二Y轴载具平台,所述X轴直线模组1上设置有X轴移动平台,所述X轴移动平台上固定有Z轴模组7,所述Z轴模组7的驱动轴连接有Z轴移动平台8,所述Z轴移动平台8上连接有可与第一Y轴载具平台和第二Y轴载具平台配合的夹爪机构9;
它的原理是:设备运行时打开视觉镜头,通过视觉镜头对第一Y轴载具平台上的工件进行检验,合格后的工件能够被选择,受三轴联动的夹爪能够夹取合格的工件将其移动到第二Y轴载具平台上,本发明充分利用了X和Y轴直线电机的高速、高精度优势,缩小了工件取放的时间,提高了抓取效率,而且在取放动作流程之间,增加了视觉判断,从而自动筛选判别,缩短了整体取放时间,提高了效率,也不需要人工进行挑拣,减少人力成本。
在上述基础上,所述第一Y轴载具平台和第二Y轴载具平台结构相同,所述第一Y轴载具平台包括第一Y轴直线导轨副和用于驱动直线导轨副的第一动力机构,所述第一Y轴直线导轨副的驱动块上部与第一Y轴载具平台固定;
它的原理是:第一Y轴载具平台上设置有检测的工件,第二Y轴载具平台上为合格工件,能够通过夹爪进行工件的转移,提升挑拣效率。
在上述基础上,所述X轴直线模组1包括X轴直线导轨副和用于驱动X轴直线导轨副的第二动力机构,所述X轴直线导轨副的驱动块和X轴移动平台固定连接;
它的原理是:第二动力机构为电机机构,通过龙门架机构实现对夹爪在X轴方向上的运动,通过X轴直线电机的高速、高精度优势,缩小了工件取放的时间,提高了抓取效率。
在上述基础上,所述Z轴直线模组包括Z轴滚珠丝杠副和用于驱动Z轴滚珠丝杠副的第三动力机构,所述Z轴移动平台8和Z轴滚珠丝杠副的滑块固定;
它的原理是:第三动力机构为电机机构,通过Z轴直线模组控制夹爪在Z轴方向上的运动,通过Z轴直线电机的高速、高精度优势,缩小了工件取放的时间,提高了抓取效率。
在上述基础上,所述视觉镜头一侧还设置有用于照明的光源;通过光源的照明,可以增加视觉镜头的检验的准确度。
在上述基础上,所述Z轴移动平台8上设置有第四动力机构,所述第四动力机构传动连接花键,所述花键与夹爪机构9传动连接;它的原理是:第四动力机构为电机结构,第四动力机构能够通过花键传动夹爪机构9,夹爪机构9能够夹取工件,完成相应的挑拣功能。
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种双工位自动化视觉分拣机构
- 一种用于自动化分拣机的分拣机构