一种肢体康复训练机器人
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及肢体康复训练器械技术领域,具体为一种肢体康复训练机器人。
背景技术
康复训练是指损伤后进行有利于恢复或改善功能的身体活动。除严重的损伤需要休息治疗外,一般的损伤不必完全停止身体练习。适当的、科学的身体练习对于损伤的迅速愈合和促进功能的恢复有着积极的作用。康复训练计划遵循全面训练、循序渐进、适宜大运动量的原则。在损伤愈合过程中,康复动作的幅度、频率、持续时间、负荷量的大小等都应逐渐增加。否则,会加重损伤或影响损伤的愈合,甚至会使损伤久治不愈而成陈旧性损伤。康复训练应注意局部专门练习与全面身体活动相结合。在损伤初期,由于局部肿胀充血、疼痛和功能障碍等,这时以全面身体活动为主,在不加重局部肿胀和疼痛的前提下,进行适当的局部活动。随着时间的推移,损伤逐渐好转或趋向愈合,局部活动的量和时间可逐渐增加。
随着人口老龄化的速度逐渐加快,全世界因为疾病引起的肢体运动障碍的患者越来越多,目前患者康复主要需有经验的主治医师对患者提供评估、诊断、治疗、训练、分析、指导康复,造成了主治医生分身乏术,对多个患者指导劳心劳力,并且患者多,医生少。造成康复训练难、人工按摩造价高的问题,在康复训练中,除了药物治疗外,用于医疗和训练行走不方便的患者的仪器也成为了一种物理治疗的必备物品。现有技术中缺少一种既能进行伸腿和弯腿的动作训练,还能进行两腿张合动作训练的设备。为此,我们提出一种肢体康复训练机器人。
发明内容
本发明的目的在于提供一种肢体康复训练机器人,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种肢体康复训练机器人,包括训练椅板和上肢力量训练器,所述训练椅板右侧顶部向右延伸固定有横平板,所述训练椅板顶部右侧设置有硅胶枕,所述训练椅板左侧前后两端均设置有扶手,所述横平板底部前后两侧均安装有支撑腿,所述横平板顶部固定有固定块,所述固定块顶部前后两侧均转动安装有上横梁,所述上横梁底部滑动连接有绞盘安装箱,所述绞盘安装箱内部安装有电动绞盘,所述电动绞盘内部缠绕安装有牵引绳,所述牵引绳一端延伸至所述绞盘安装箱外部,所述上横梁下方设置有用来套接在使用者腿部的卡箍腿环,所述卡箍腿环外壁顶部固定有固定管,所述牵引绳远离所述绞盘安装箱的一端延伸至所述固定管内部,且和所述卡箍腿环固定连接;
所述训练椅板底部固定有底座,所述底座左侧开设有开放槽,所述开放槽右端中间开设有凹槽,所述开放槽内部前后两侧均转动安装有下横梁,所述下横梁右侧顶部均固定连接有齿轮,所述底座底部中间安装有伺服电机,所述伺服电机输出端延伸至所述凹槽内部固定有转盘,所述转盘顶部一侧固定有支柱,所述支柱上转动连接有连杆,所述开放槽底部中间滑动安装有和所述齿轮相互啮合的双边齿条,所述双边齿条左端固定有挡块,所述开放槽底部中间开设有导向滑槽,所述双边齿条底部中间固定有和所述导向滑槽配合的导向滑块,所述双边齿条右端中间设置有固定块,所述连杆远离所述支柱的一端和所述固定块转动连接,所述下横梁另一端均延伸至所述开放槽外部,所述上横梁底部左侧和所述下横梁远离所述齿轮的一端顶部之间均连接有立杆,所述下横梁顶部中间开设有滑槽,所述滑槽内部安装有滑杆,所述下横梁上方滑动连接有液压缸,所述液压缸底部延伸至所述滑槽内部固定有电动滑块,所述电动滑块滑动安装在所述滑杆外壁,所述液压缸顶部中间固定有上固定块,所述上固定块顶部转动连接有用来托住使用者腿部的弧形托腿架;
所述上横梁底部中间均开设有T型滑槽,所述绞盘安装箱和所述上肢力量训练器顶部均固定有和所述T型滑槽适配的T型滑块,所述上肢力量训练器左右两侧均开设有供所述牵引绳通过的通孔,所述上肢力量训练器内部底部左右两侧均安装有和所述牵引绳配合的定滑轮,所述牵引绳左端通过对应的通孔延伸至所述上肢力量训练器外部,且固定连接有所述卡箍腿环,所述牵引绳右端通过对应的通孔延伸至所述上肢力量训练器外部,且固定连接有手环。
作为上述方案的进一步设置,所述齿轮底部固定焊接在所述下横梁顶部,所述齿轮轴心处固定有中轴,所述中轴转动安装在所述开放槽内部。
作为上述方案的进一步设置,所述手环内壁底部粘接有硅胶护垫块,所述硅胶护垫块顶部均匀设置有手指槽。
作为上述方案的进一步设置,所述训练椅板左侧设置有过渡平缓的坐板,所述坐板宽度为30-35CM,所述坐板左端和所述底座左端平齐。
作为上述方案的进一步设置,所述卡箍腿环内壁均设置有海绵垫圈,所述卡箍腿环和固定管均为为医用PVC制成。
作为上述方案的进一步设置,所述弧形托腿架底部设置有U型板,所述U型板套设在所述上固定块外部,且通过销轴和所述上固定块转动连接。
作为上述方案的进一步设置,所述弧形托腿架内壁均设置有软性垫层,所述软性垫层上均匀设置有按摩颗粒,所述软性垫层为医用橡胶制成。
作为上述方案的进一步设置,两个所述下横梁之间的最大角度110°两个所述上横梁之间的最大角度为110°,当两个所述下横梁相互平行时,所述挡块将齿轮挡住。
作为上述方案的进一步设置,所述下横梁长度为100CM,所述上横梁的长度为180CM,所述下横梁和所述上横梁宽度一致。
作为上述方案的进一步设置,所述底座底部四角处均固定有脚垫,所述脚垫底部和所述支撑腿底部平齐。
与现有技术相比,本发明的有益效果是:
1、本发明设置绞盘安装箱,通过弧形托腿架卡住使用者的小腿,再将卡箍腿环套在使用者的大腿上,通过电动滑块在滑杆上直线滑动,协助使用者做腿部弯曲和伸展的训练,通过电动绞盘对牵引绳进行收卷或放松,从而将使用者大腿向上拉伸或下放松,配合弧形托腿架的使用,可对病情较为严重的使用者进行康复训练,减少病人的劳累感。
2、本发明设置上肢力量训练器,使用者将手握住手环,通过拉动手环,带动牵引绳顺着定滑轮移动,从而拉动卡箍腿环,卡箍腿环承载了腿部重量,从而可以同时对使用者的上肢和下肢进行康复训练,设置T型滑槽和T型滑块灵活的安装结构,使用本装置实用性较广。
3、本发明通过开启伺服电机,伺服电机转动带动转盘转动,转盘带动连杆转动,连杆另一端和双边齿条转动连接,且双边齿条滑动安装在开放槽内壁中间,转盘转动,带动双边齿条移动,从而带动与之啮合的齿轮转动,从而带动两个下横梁转动,使用者斜躺在训练椅板上,将小腿肚搭在弧形托腿架上,使得弧形托腿架卡住使用者的小腿,两个下横梁转动,从而对使用者双腿进行开合训练。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
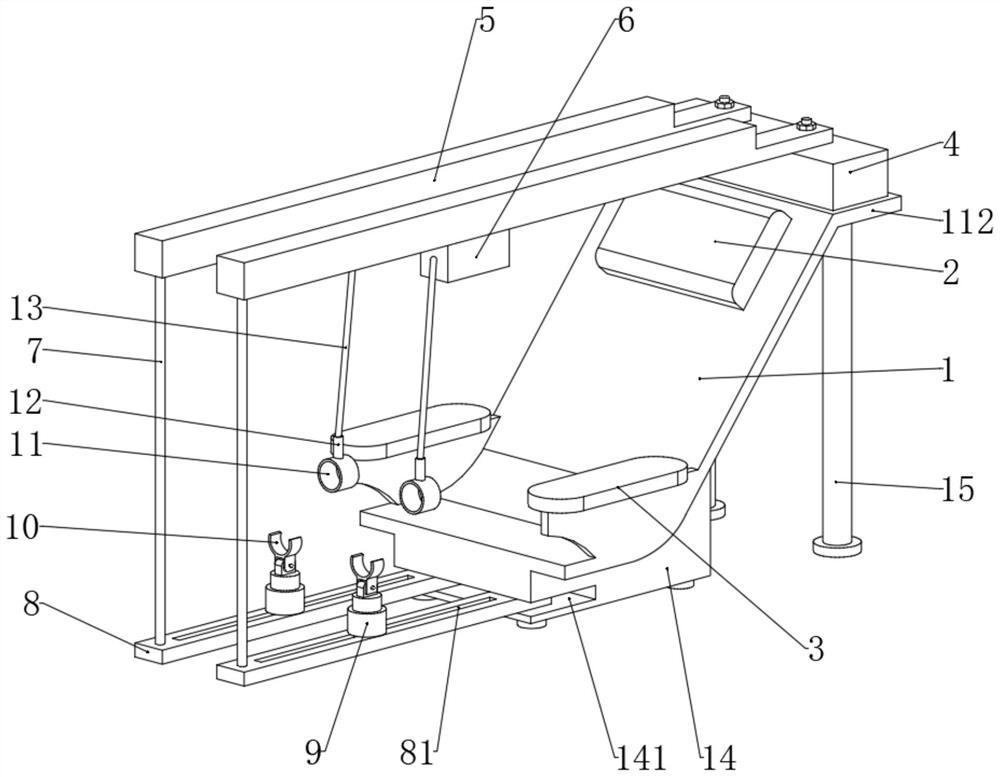
图1为本发明第一视角结构示意图;
图2为本发明第二视角结构示意图;
图3为本发明第三视角结构示意图;
图4为本发明结构侧视图;
图5为本发明结构俯视图;
图6为本发明底座内部结构示意图;
图7为本发明第四视角结构示意图;
图8为本发明A处结构示意图;
图9为本发明上肢力量训练器内部结构示意图;
图10为本发明B处结构示意图。
图中:1、训练椅板;112、横平板;2、硅胶枕;3、扶手;4、固定块;5、上横梁;51、T型滑槽;6、绞盘安装箱;7、立杆;8、下横梁;81、滑槽;82、齿轮;9、液压缸;91、电动滑块;92、上固定块;10、弧形托腿架;11、卡箍腿环;12、固定管;13、牵引绳;14、底座;141、开放槽;142、凹槽;15、支撑腿;16、伺服电机;17、脚垫;18、滑杆;19、转盘;20、连杆;21、上肢力量训练器;22、T型滑块;23、手环;24、定滑轮;25、双边齿条;251、挡块。
具体实施方式
为了使本技术领域的人员更好地理解本申请方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分的实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图1~10,并结合实施例来详细说明本申请。
实施例1
本实施例1介绍了一种肢体康复训练机器人,包括训练椅板1和上肢力量训练器21,所述训练椅板1右侧顶部向右延伸固定有横平板112,所述训练椅板1顶部右侧设置有硅胶枕2,所述训练椅板1左侧前后两端均设置有扶手3,所述横平板112底部前后两侧均安装有支撑腿15,所述横平板112顶部固定有固定块4,所述固定块4顶部前后两侧均转动安装有上横梁5,所述上横梁5底部滑动连接有绞盘安装箱6,所述上横梁5底部中间均开设有T型滑槽51,所述绞盘安装箱6顶部固定有和所述T型滑槽51适配的T型滑块22,所述绞盘安装箱6内部安装有电动绞盘,所述电动绞盘内部缠绕安装有牵引绳13,所述牵引绳13一端延伸至所述绞盘安装箱6外部,所述上横梁5下方设置有用来套接在使用者腿部的卡箍腿环11,所述卡箍腿环11内壁均设置有海绵垫圈,具有缓冲保护的作用,不会勒伤使用者,所述卡箍腿环11和固定管12均为为医用PVC制成,所述卡箍腿环11外壁顶部固定有固定管12,所述牵引绳13远离所述绞盘安装箱6的一端延伸至所述固定管12内部,且和所述卡箍腿环11固定连接,所述训练椅板1底部固定有底座14,所述底座14左侧开设有开放槽141,所述开放槽141内部前后两侧均转动安装有下横梁8,所述下横梁8上方滑动连接有液压缸9,所述液压缸9底部延伸至所述滑槽81内部固定有电动滑块91,所述电动滑块91滑动安装在所述滑杆18外壁,所述液压缸9顶部中间固定有上固定块92,所述上固定块92顶部转动连接有用来托住使用者腿部的弧形托腿架10,所述弧形托腿架10底部设置有U型板,所述U型板套设在所述上固定块92外部,且通过销轴和所述上固定块92转动连接,弧形托腿架10内壁均设置有软性垫层,所述软性垫层上均匀设置有按摩颗粒,所述软性垫层为医用橡胶制成,使用时,使用者斜躺在训练椅板1上,将小腿肚搭在弧形托腿架10上,使得弧形托腿架10卡住使用者的小腿,再将卡箍腿环11套在使用者的大腿上,通过电动滑块91在滑杆18上直线滑动,协助使用者做腿部弯曲和伸展的训练,通过电动绞盘对牵引绳13进行收卷或放松,从而将使用者大腿向上拉伸或下放松,配合弧形托腿架10的使用,可对病情较为严重的使用者进行康复训练,减少病人的劳累感。
实施例2
本实施例2介绍了一种肢体康复训练机器人,一种肢体康复训练机器人,包括训练椅板1和上肢力量训练器21,所述训练椅板1右侧顶部向右延伸固定有横平板112,所述训练椅板1顶部右侧设置有硅胶枕2,所述训练椅板1左侧前后两端均设置有扶手3,所述横平板112底部前后两侧均安装有支撑腿15,所述横平板112顶部固定有固定块4,所述固定块4顶部前后两侧均转动安装有上横梁5,所述上横梁5底部滑动连接有绞盘安装箱6,所述绞盘安装箱6内部安装有电动绞盘,所述电动绞盘内部缠绕安装有牵引绳13,所述牵引绳13一端延伸至所述绞盘安装箱6外部,所述上横梁5下方设置有用来套接在使用者腿部的卡箍腿环11,所述卡箍腿环11外壁顶部固定有固定管12,所述牵引绳13远离所述绞盘安装箱6的一端延伸至所述固定管12内部,且和所述卡箍腿环11固定连接,所述上横梁5底部中间均开设有T型滑槽51,所述上肢力量训练器21顶部固定有和所述T型滑槽51适配的T型滑块22,所述上肢力量训练器21左右两侧均开设有供所述牵引绳13通过的通孔,所述上肢力量训练器21内部底部左右两侧均安装有和所述牵引绳13配合的定滑轮24,所述牵引绳13左端通过对应的通孔延伸至所述上肢力量训练器21外部,且固定连接有所述卡箍腿环11,所述牵引绳13右端通过对应的通孔延伸至所述上肢力量训练器21外部,且固定连接有手环23,所述手环23内壁底部粘接有硅胶护垫块,所述硅胶护垫块顶部均匀设置有手指槽,在实际使用中,通过电动绞盘带动牵引绳13移动,带动卡箍腿环11对使用者进行拉伸训练,适用于上肢不需要锻炼或上肢不适宜训练的使用者,当使用者的上肢也需要训练时,将绞盘安装箱6取下,再将上肢力量训练器21滑动安装在上横梁5底部,然后将卡箍腿环11套接在使用者腿部,接着使用者将手握住手环23,通过拉动手环23,带动牵引绳13顺着定滑轮24移动,从而拉动卡箍腿环11,卡箍腿环11承载了腿部重量,从而可以同时对使用者的上肢和下肢进行康复训练,设置T型滑槽51和T型滑块22灵活的安装结构,使用本装置实用性较广。
实施例3
本实施例3介绍了一种肢体康复训练机器人,一种肢体康复训练机器人,包括训练椅板1和上肢力量训练器21,所述训练椅板1右侧顶部向右延伸固定有横平板112,所述训练椅板1顶部右侧设置有硅胶枕2,所述训练椅板1左侧前后两端均设置有扶手3,所述训练椅板1左侧设置有过渡平缓的坐板,所述坐板宽度为30-35CM,所述坐板左端和所述底座14左端平齐,所述横平板112底部前后两侧均安装有支撑腿15,所述横平板112顶部固定有固定块4,所述固定块4顶部前后两侧均转动安装有上横梁5,所述上横梁5底部滑动连接有绞盘安装箱6,所述训练椅板1底部固定有底座14,所述底座14底部四角处均固定有脚垫17,所述脚垫17底部和所述支撑腿15底部平齐,所述底座14左侧开设有开放槽141,所述开放槽141右端中间开设有凹槽142,所述开放槽141内部前后两侧均转动安装有下横梁8,所述下横梁8右侧顶部均固定连接有齿轮82,所述齿轮82底部固定焊接在所述下横梁8顶部,所述齿轮82轴心处固定有中轴,两个所述下横梁8之间的最大角度110°两个所述上横梁5之间的最大角度为110°,当两个所述下横梁8相互平行时,所述挡块251将齿轮82挡住,所述中轴转动安装在所述开放槽141内部,所述底座14底部中间安装有伺服电机16,所述伺服电机16输出端延伸至所述凹槽142内部固定有转盘19,所述转盘19顶部一侧固定有支柱,所述支柱上转动连接有连杆20,所述开放槽141底部中间滑动安装有和所述齿轮82相互啮合的双边齿条25,所述双边齿条25左端固定有挡块251,所述开放槽141底部中间开设有导向滑槽,所述双边齿条25底部中间固定有和所述导向滑槽配合的导向滑块,所述双边齿条25右端中间设置有固定块,所述连杆20远离所述支柱的一端和所述固定块转动连接,所述下横梁8另一端均延伸至所述开放槽141外部,所述上横梁5底部左侧和所述下横梁8远离所述齿轮82的一端顶部之间均连接有立杆7,所述下横梁8长度为100CM,所述上横梁5的长度为180CM,所述下横梁8和所述上横梁5宽度一致,使用时,开启伺服电机16,伺服电机16转动带动转盘19转动,转盘19带动连杆20转动,连杆20另一端和双边齿条25转动连接,且双边齿条25滑动安装在开放槽141内壁中间,转盘19转动,带动双边齿条25移动,从而带动与之啮合的齿轮82转动,从而带动两个下横梁8转动,使用者斜躺在训练椅板1上,将小腿肚搭在弧形托腿架10上,使得弧形托腿架10卡住使用者的小腿,两个下横梁8转动,从而对使用者双腿进行开合训练,同时下横梁8转动,也带动上横梁5随之转动,不影响绞盘安装箱6和上肢力量训练器21的使用,当两个齿轮82相互平行时,挡块251将齿轮82卡住,使得两个下横梁8不能相向转动,双边齿条25的长度有限,因此两个下横梁8开合范围有限,不会对使用者造成伤害,通过伺服电机16不断转动,带动连杆20不断转动,带动双边齿条25来回移动,从而带动齿轮82往复转动,从而使得两个下横梁8不断开合,训练效果好。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种肢体康复训练机器人
- 下肢体康复训练机器人