无人机三维无线通信网络的分布式部署方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明属于无人机三维无线通信网络技术领域,更为具体地讲,涉及一种无人机三维无线通信网络的分布式部署方法。
背景技术
移动互联网的高速发展催生了各种新兴的网络业务,因此造成了移动数据流量需求飞速膨胀的问题,依靠传统地面基站难以应对突发的流量需求增高的情况。与此同时,地面基站还面临着偏远地区、山区等险峻位置部署成本高、难以部署,以及在地震等自然灾害中容易遭受破坏等一系列问题,因此亟需找到其他基站部署方式用以解决以上问题。
随着无人机技术的发展,无人机拥有快速部署、高机动性以及更有效的无障碍传播路径等特点,其有望成为下一代无线通信网络的重要组成部分。例如,当自然灾害出现时,地面基站受到损坏无法提供通信服务,则可以部署无人机基站进行应急通信服务;当体育馆等场所在人流量急剧增加的情况下,可以利用无人机基站进行通信援助,将无人机基站与地面基站进行结合,组成异构通信网络为用户提供大流量的通信服务。
尽管无人机基站可以在无线网络的构成中提供很高的收益,但同时也带来了很多挑战。其中一个重要的问题是,对单个或者多个无人机基站,如何根据无人机的动态特性进行部署使得其能提供的无线通信网络性能达到最优,因此对无人机基站的部署优化算法显得尤为重要。目前常见的是,将无线通信网络性能抽象为无人机能提供的信道容量大小或者无人机所能提供的通信覆盖范围,以最大信道容量或最大覆盖范围为目标,同时考虑无人机的能量消耗,移动范围限制,速度限制等因素,根据所提出的优化问题定制优化算法,用以求解无人机的部署方案。常见的算法有粒子群算法(PSO),深度学习,动态规划,连续凸逼近算法(SCA)等。但是常见的部署算法中大多数为中心化算法,当有多个无人机构成无线通信网络时,算法要求需要有一个控制中心来运行算法,并将运行结果传递给组网内的无人机,而组网内各个无人机也需要将收集到的信息传递回控制中心,同时由于需要复杂的同步和调度机制,因此很难进行实施。
发明内容
本发明的目的在于克服现有技术的不足,提供一种无人机三维无线通信网络的分布式部署方法,以分布式算法解决无人机基站部署问题。
为了实现上述发明目的,本发明无人机三维无线通信网络的分布式部署方法包括以下步骤:
S1:无人机三维通信网络中每个无人机基站j在位置调整时隙t
S2:各个无人机基站j在位置调整时隙t
各个无人机基站j根据其用户预测位置集合,得到其下一位置调整时隙t
S3:每个无人机基站j分别根据其位置坐标、邻居无人机基站位置坐标和用户预测位置,迭代优化得到下一位置调整时隙t
S4.1:每个无人机基站j根据预先得到的无人机三维无线通信网络拓扑,构建无人机基站位置矩阵
S4.2:令k=1,初始化位置矩阵
S4.3:令q=1;
S4.4:令q'=[q mod 3]+1,q”=[(q+1)mod 3]+1,采用如下公式确定位置矩阵第q′个分量
S4.5:令τ=0,初始化位置矩阵第q个分量
S4.6:无人机基站j从每个邻居无人机基站
其中,ξ
(a)ξ
(b)
(c)存在标量ε∈(0,1),当
(d)
S4.7:采用如下方法更新得到位置矩阵第q个分量
1)获取加权平均位置矩阵
其中:
从加权平均位置矩阵
2)采用预设的空地路径损耗模型,根据无人机基站j在本次迭代中的位置坐标
同时根据邻居无人机基站
3)计算加权平均位置矩阵
其中,SNR
SNR
Ψ
其中,
4)采用以下公式更新位置矩阵第q个分量
其中,
h
S4.8:判断是否τ<H-1,如果是,进入步骤S4.9,否则进入步骤S4.10;
S4.9:令τ=τ+1,返回步骤S4.6;
S4.10:判断是否q<3,如果是,进入步骤S4.11,否则进入步骤S4.12;
S4.11:将
S4.12:判断是否k<K,如果是,进入步骤S4.13,否则进入步骤S4.14;
S4.13:将
S4.14:将
S4:判断无人机基站j是否需要继续工作,如果是,进入步骤S5,否则该无人机基站j的位置调整结束。
S5:无人机三维通信网络中的各个无人机基站j在下一位置调整时隙t
本发明无人机三维无线通信网络的分布式部署方法,无人机三维通信网络中的各个无人机基站在每个位置调整时隙到来时,先后收集其邻居无人机基站位置和所覆盖范围内各个用户的位置,进行下一位置调整时隙的用户位置预测,根据用户预测位置确定下一位置调整时隙的用户集合,每个无人机基站分别根据其位置坐标、邻居无人机基站位置坐标和用户预测位置,迭代优化得到下一位置调整时隙该无人机基站的位置。本发明可以令每个无人机基站独立调整自身位置,避免中心化算法所需要的大量通信以及对同步和调度的严格要求。
附图说明
图1是无人机三维无线通信网络结构示意图;
图2是图1所示三维无线网络的平面图;
图3是采用吉布斯采样的分布式算法求解本发明优化模型的流程图;
图4是本发明无人机三维无线通信网络的分布式部署方法的具体实施方式流程图;
图5是本发明中无人机基站迭代优化得到下一位置调整时隙的位置坐标的具体实施方式流程图;
图6是本实施例中k=1时目标函数
具体实施方式
下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
实施例
为了更好地说明本发明的技术方案,首先对本发明的技术推导过程进行简要说明。
图1是无人机三维无线通信网络结构示意图。如图1所示,在无人机三维无线通信网络中,每个无人机基站有一个固定的覆盖范围,每个无人机基站只能在这个范围内根据地面用户的移动调整自身的位置。而地面用户则可以在所有无人机基站覆盖范围内任意移动。假设该三维无线通信网络内有J个无人机基站以及I个地面用户,并且每个地面用户仅能与一个无人机基站进行通信链接。为了提升无线网络的通信服务质量,每个无人机基站需要与其邻居无人机基站建立通信链接用以交换彼此的位置信息,一旦邻居间通信链接建立完成,两个邻居可以彼此进行信息交换。
为了便于进行后续分析和计算,首先需要建立无人机基站到用户的空地路径损耗模型。在实际应用中空地路径损耗模型可以根据实际场景来设置,本实施例中仅列举一种空地路径损耗模型,该模型依赖于无人机基站的高度以及无人机基站与其服务的用户之间的仰角,并涉及两种传播类别,即视距(LoS)连接和非视距(NLoS)连接。因此,无人机基站j与其服务的用户i在时刻t的平均空地路径损耗PL
PL
其中,j=1,2,…,J,J表示无人机基站的数量,i=1,2,…,I,I表示用户数量,FSPL
无人机基站j与其服务的用户i之间在时刻t的自由空间路径损耗FSPL
其中,f表示传输信号的载波频率,d
进一步地,无人机基站j与用户i之间具有视距传输的概率P(θ
其中a和b为预设的环境参数,θ
其中,ρ
因此,由公式(3)可得无人机基站j与用户i在时刻t的空地信道路径损耗期望值Λ
其中P(θ
P(θ
一般来说,由无人机提供通信服务的无缝网络覆盖区域可以划分为多个多边形。为简化分析,本实施例中三维无线网络构型中假设每个无人机基站的覆盖范围为正方形。图2是图1所示三维无线网络的平面图。在图2中采用带圆圈的数字表示无人机基站,采用圆点表示用户。在图2所示的三维无线网络中,每个无人机基站可以通过GPS知晓其自身的三维坐标。假设无人机基站j所覆盖的方形区域的中心坐标为
图2中无人机基站之间的实线表示相应的无人机基站可以彼此建立通信链接用以进行信息交换。定义无人机基站j的邻居为当且仅当满足以下条件的无人机基站
其中C表示覆盖区域的正方形的边长。
根据公式(7)可以知道无人机基站间的邻居关系不会随着无人机基站的移动而改变。
对任意无人机基站j=1,2,...,J,记其邻居无人机基站
对地面用户i,其位置坐标可表示为
则进一步地对无人机基站j,其在时刻t所负责的用户的集合为:
公式(10)表明与用户i所连接的无人机基站会随时间的改变而改变。实际上,每个无人机基站会通过收集用户的位置去决定应该继续与该用户进行交流或者将该用户切换给邻居无人机基站进行负责。
则用户i的接收信号功率Ψ
Ψ
P
另一方面,无人机基站κ
其中,
进一步地,定义在时刻t时无人机j覆盖范围内的所有用户的总信道容量为
其中,
接下来需要构建对应的优化模型,用以求解使得网络性能最优的多无人机基站部署方案。一般情况下,当信道容量越高时,无线通信网络的性能越好。因此需要研究这样一个优化问题,当无人机与地面用户都是移动时,如何进行多无人机部署,使得所有无人机与用户链接的信道容量
由公式(14)所表示的优化问题并不是凸优化问题,难以获得全局最优解。针对该问题,本发明采用基于吉布斯采样的分布式算法对其进行处理。
在特定时刻t
其中
本发明采用基于吉布斯采样的分布式算法对公式(16)进行求解。为了便于求解,定义三个不同的单位向量
则公式(16)可以通过吉布斯采样转化为:
其中q'=[q mod 3]+1,q”=[(q+1)mod 3]+1,
图3是采用吉布斯采样的分布式算法求解本发明优化模型的流程图。如图3所示,在采用吉布斯采样的分布式算法求解本发明优化模型的过程中,在每次迭代时,依次对无人机基站位置向量的三个分量进行迭代优化,从而得到整体的优化结果。
为了实现由无人机基站独立调整自身位置而无需采用任何集中控制机制,需要将公式(18)分解为J个子问题,每个子问题由无人机基站j分别进行求解,对应的优化问题如下所示:
其中q'和q”与公式(18)定义相同,
对第k次迭代中的无人机基站j,本发明使用子循环更新
因此在第k次迭代求解无人机基站位置的第q个分量时,无人机基站j会有对应的初始迭代值
其中
(a)ξ
(b)
(c)存在标量ε∈(0,1),当
(d)
为了计算出第τ+1次迭代的
其中
其中:
则无人机基站j将通过以下公式计算出第τ+1次迭代的
其中
由于各个无人机基站是各自独立计算自身位置,那么对于不同的无人机,当优化无人机位置的第q个分量时,其生成的
在以上分布式算法中,由于迭代步长
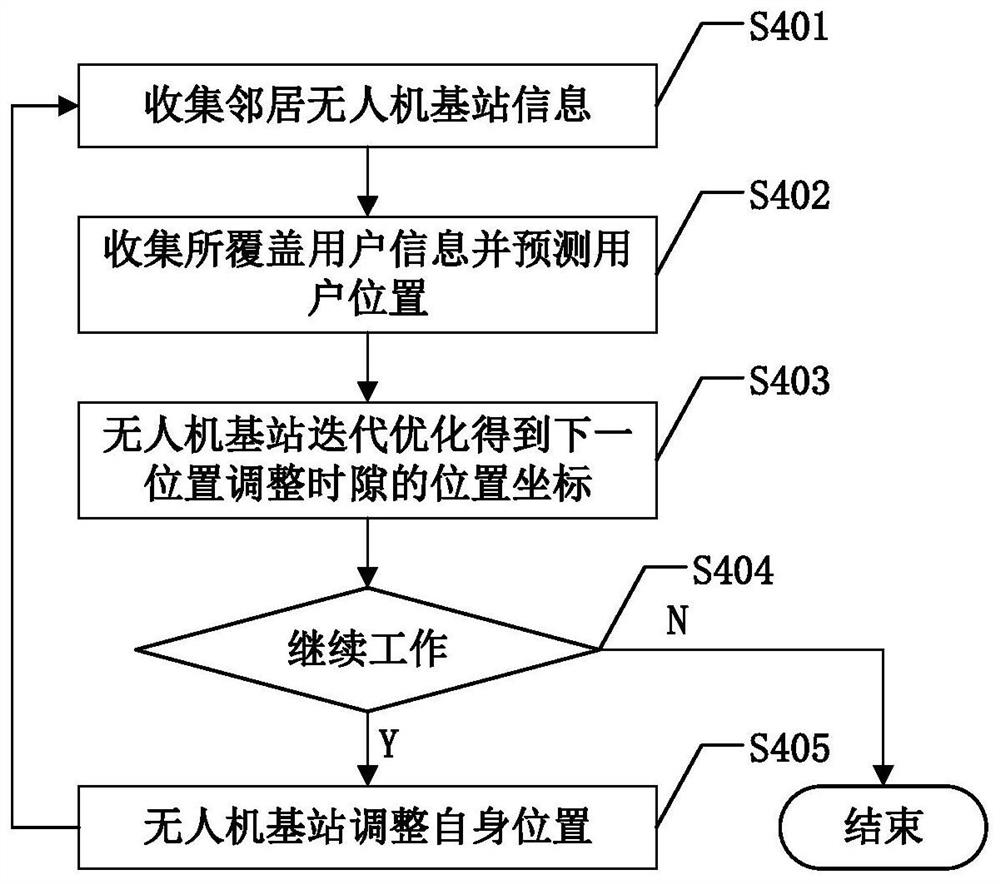
根据以上推导出的算法,则可以令每个无人机基站独立调整自身位置。此外,为了使无人机基站位置的调整结果更加准确,本发明还加入了用户运动预测方法,从而提出了一种无人机三维无线通信网络的分布式部署方法。图4是本发明无人机三维无线通信网络的分布式部署方法的具体实施方式流程图。如图4所示,本发明无人机三维无线通信网络的分布式部署方法的具体步骤包括:
S401:收集邻居无人机基站信息:
无人机三维通信网络中每个无人机基站j在位置调整时隙t
S402:收集所覆盖用户信息并预测用户位置:
各个无人机基站j在位置调整时隙t
各个无人机基站j根据其用户预测位置集合,得到其下一位置调整时隙t
在实际应用中,用户位置的预测方法可以根据需要设置。本实施例中,采用对用户历史位置信息中的x坐标和y坐标分别进行多项式拟合,然后计算得到下一位置调整时隙t
S403:无人机基站迭代优化得到下一位置调整时隙的位置坐标:
每个无人机基站j分别根据其位置坐标、邻居无人机基站位置坐标和用户预测位置迭代优化得到下一位置调整时隙t
S501:构建无人机基站位置矩阵:
每个无人机基站j根据预先得到的无人机三维无线通信网络拓扑,构建无人机基站位置矩阵
S502:令k=1,初始化位置矩阵
S503:令q=1;
S504:确定位置矩阵分量
令q'=[q mod 3]+1,q”=[(q+1)mod 3]+1,采用如下公式确定位置矩阵第q′个分量
其中,
S505:令τ=0,初始化位置矩阵第q个分量
S506:计算位置矩阵第q个分量的加权平均向量:
无人机基站j从每个邻居无人机基站
其中,ξ
(a)ξ
(b)
(c)存在标量ε∈(0,1),当
(d)
S507:更新位置矩阵第q个分量
采用如下方法更新得到位置矩阵第q个分量
1)获取加权平均位置矩阵
其中:
从加权平均位置矩阵
2)采用预设的空地路径损耗模型,根据无人机基站j在本次迭代中的位置坐标
同时根据邻居无人机基站
根据本实施例中所提出的空地路径损耗模型,计算空地信道衰落值Λ
其中,LoS表示视距传输,NLoS表示非视距传输;
PL
PL
η
其中,f表示传输信号的载波频率,d
P(θ
其中a和b为环境参数,exp表示以自然常数e为底的指数函数,θ
ρ
P(θ
P(θ
3)计算加权平均位置矩阵
其中,SNR
SNR
Ψ
其中,
4)采用以下公式更新位置矩阵第q个分量
其中,
h
S508:判断是否τ<H-1,如果是,进入步骤S509,否则进入步骤S510;
S509:令τ=τ+1,返回步骤S506;
S510:判断是否q<3,如果是,进入步骤S511,否则进入步骤S512;
S511:将
S512:判断是否k<K,如果是,进入步骤S513,否则进入步骤S514;
S513:将
S514:确定下一个位置调整时隙的位置坐标:
将
S404:判断无人机基站j是否需要继续工作,如果是,进入步骤S405,否则该无人机基站j的位置调整结束。
S405:无人机基站调整自身位置:
无人机三维通信网络中的各个无人机基站j在下一位置调整时隙t
很显然,无人机三维无线通信网络在初始设置时,每个无人机基站的初始位置由操作人员指定,后续位置由各个无人机基站自行计算,从而实现无人机三维无线通信网络的分布式部署。
为了更好地说明本发明的技术效果,采用一个具体实例对本发明进行仿真验证。本次仿真验证采用如图1的无人机三维无线通信网络结构,即无人机三维无线通信网络包含9个无人机基站,每个无人机基站负责一个600m×600m的正方形区域,并且在时刻t
表1为了设置步长及展示本发明的优化效果,定义:
其中
其中q'和q”取值与公式(18)相同,
图6是本实施例中k=1时目标函数
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
- 无人机三维无线通信网络的分布式部署方法
- 无人机三维无线通信网络的分布式部署方法