用于控制装备在车辆上的外部可充气行人安全结构的展开的方法和系统以及集成所述系统的行人保护设备
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及一种用于控制装备在车辆上的外部可充气安全结构的展开的方法,所述外部可充气安全结构特别地用于行人。
本发明还涉及一种用于控制外部可充气行人安全结构的展开的系统,所述系统实现根据本发明的控制方法,本发明还涉及一种集成这种系统的外部可充气行人安全结构。
本发明的领域涉及在被自主的、半自主的或授权的驾驶车辆、单独的或集体的、或被诸如有轨电车的引导车辆冲撞或撞倒的情况下的行人安全的领域。行人安全是指对人的保护,但本发明的领域还涵盖所有类型的障碍物、动物或惰性物体的处理。
背景技术
导致自主或半自主车辆和自主穿梭车的授权的驾驶车辆的大量发展不断提出行人安全问题。随着市区内有轨电车和引导移动系统的强烈发展,这个问题也会出现。
辅助驾驶和自主驾驶正在急剧地降低汽车事故的严重性。然而,特别是在城市中,行人和用于移动的每种装置(自行车、小型摩托车等)的共存将确保这些不同运动元素之间的相互作用的持续的重大风险。
通常在小于40km/h的中等速度下的这些撞击虽然不是致命的,但使受害者相当虚弱持续许多年。
到目前为止,汽车制造商主要关注于设计车辆的前部以降低行人撞击的严重性,这还导致车辆的散热器护栅的相对标准化,该散热器护栅已经变得基本竖直。此外,某些汽车制造商已经提出了通过实现适当的烟火装料和外部可充气缓冲垫来升起引擎盖的机构,但是这些系统实际上仅确保行人的上部分抵靠车辆的车身的撞击缓冲功能,而没有系统地将行人保持在车辆上,从而导致进一步事故的风险。
专利US7,630,806公开了一种通过实现装备在车辆上的外部可充气结构来检测和保护行人的系统。这种检测和保护系统包括可在车辆前方展开的可充气缓冲垫,该可充气缓冲垫被设计成缓冲行人抵靠车辆引擎盖的撞击,并且包括被设计成保持行人并因此防止其超过车辆顶部的网。该系统基于源自传感器的信号的处理而被控制,并由能够集成人工智能方法的形状识别系统分析。
专利US5,377,108公开了一种用于装备在汽车上并实现神经网络的撞击预测的系统。在预测撞击的情况下,该预测系统命令气囊或可充气缓冲垫的提早展开。
文献EP 3187378 A1描述了装备在车辆上的一组可充气袋,并且可命令可充气袋的展开,但是这些可充气袋不能通过阀或通气口彼此连通。它们中的每一个都具有独立的充气系统。
然而,现有技术的这些系统具有在行人撞击抵靠车辆之前不允许对行人进行个性化处理的缺点,并且易于具有有限的保护效果。
本发明的目的是通过提出一种控制外部可充气安全结构的展开的方法、实现与行人的个性化识别相关联的撞击的预测、以及命令该可充气结构使得行人被举起并保持在可充气结构内直到车辆停止来弥补这些缺点。该方法可以更一般地处理诸如行人、人、动物或车辆外部的物体的障碍物的情况,其中与障碍物的相互作用是不可避免的。
因此,本发明提出了一种控制外部可充气安全结构的方法和系统,该外部可充气安全结构像车辆内部的座椅安全带一样能够在大多数常见事故中照顾行人,这些事故显著地破坏受害者的生命,尽管不是致命的。
发明内容
该目的通过一种用于控制装备在车辆上的外部可充气安全结构的定向和展开的方法来实现,该方法包括:
检测步骤,该检测步骤基于对源自装备在所述车辆上的一个或多个传感器的信号的处理,来检测所述车辆前方的行人的突然出现,从而导致产生检测数据,
识别步骤,该识别步骤基于对源自装备在所述车辆上的一个或多个传感器的信号的处理而将所述行人识别为人类、动物或惰性物体,从而导致产生识别数据和动态空间位置数据。
根据本发明,该方法还包括以下步骤:基于识别数据和动态空间位置数据计算外部可充气结构的展开策略,导致产生用于选择性地控制(i)可充气结构的动态定位和(ii)构成外部可充气安全结构的多个可充气袋的填充的信号。
有利地,根据本发明的展开方法还包括分类步骤,所述分类步骤涉及对检测数据和/或识别数据的处理,所述处理被组织为将所识别的行人分类到多个预定障碍物和配置类别之中的具有对应展开策略的行人障碍物类别中。
在本发明的一个特别的实施方式中,特别适用于公路车辆,检测步骤和识别步骤在装备在车辆上的驾驶员辅助系统内实现。
然后,根据本发明的展开方法可以在响应于检测到所述车辆前方的障碍物而启动的自动紧急制动程序期间实现。
分类步骤还可以有利地包括对预先存储在学习数据库中的经验数据的处理,所述学习数据库承载在所述车辆上或能够从所述车辆远程访问。
经由所述车辆所连接的通信网络可以有利地向所述学习数据库供应在配备有用于保护行人的系统的车辆的团体中收集的经验数据,所述系统实现了根据本发明所述的展开的控制方法。该连接可以是周期性的,或者由展开控制系统或由被设置成更新如此配备的车队的远程管理系统来请求。这些数据可以由车辆制造商或适当的授权机构预先验证。
分类步骤和展开策略计算步骤可以在承载在车辆上的人工智能系统内实现。
根据本发明的另一方面,提出了通过实现根据本发明的方法来控制装备在车辆上的外部可充气安全结构的展开,该系统包括:
检测装置,该检测装置基于对源自装备在所述车辆上的一个或多个传感器的信号的处理,来检测所述车辆前方的行人障碍物的突然出现,从而导致产生检测数据,
识别装置,该识别装置基于对源自所述多个传感器之中的一个或多个传感器的信号的处理而将所述行人识别为人类、动物或惰性物体,并且产生识别数据和动态空间位置数据。
根据本发明,用于控制模块的定位和展开的系统还包括策略计算装置,该策略计算装置基于识别数据和动态空间位置数据来计算用于定位和展开的策略,并产生用于选择性地控制外部可充气结构的动态定位和构成所述可充气结构的多个可充气袋的填充的信号。
用于控制展开的系统还可有利地包括分类装置,该分类装置将行人分类到多个预定行人类别之中的行人类别中,并且展开策略计算装置被编程为考虑由该分类得到的行人类别。
检测装置和识别装置可以有利地被集成在装备在车辆上的驾驶员辅助系统内。
在本发明的一个特定实施方式中,展开控制系统还可以包括承载在车辆上或者可从所述车辆远程访问的学习数据库,该学习数据库被设计成存储可由分类装置使用的经验数据。
还可以提供的是,根据本发明的展开控制系统连接到用于共享车辆的团体内的经验的远程系统,该车辆设置有集成了根据本发明的展开控制系统的用于保护行人的设备。
分类装置和展开策略计算装置可以有利地被集成在承载在车辆上的人工智能系统内。
根据本发明的又一方面,提出了一种行人保护设备,该行人保护设备被设计成装备在实现根据本发明的控制方法的车辆上,该设备包括:
用于相对于所述车辆动态地定位所述外部可充气结构的定位装置,以及
外部可充气安全结构,所述外部可充气安全结构适于响应于检测到和识别到突然出现在所述车辆前方的行人障碍物而从所述车辆的前方被展开,
气体产生装置,所述气体产生装置被设计成对所述外部可充气安全结构充气。
外部可充气结构有利地包括多个可充气袋,由源自气体发生器的气体对可充气袋的填充根据基于检测数据和/或行人识别数据计算的展开策略而受到选择性的控制,以便将所述行人接收并保持在外部可充气结构内持续预定时间。
可以考虑选择性控制袋的填充的几个实施方式。一些袋可以直接连接到气体发生器。其它袋接收来自相邻袋的充气气体。
可以通过以下方式激活选择性命令:
通过设计,
或者在展开之前以预编程命令的形式,
或者通过在实现保护系统的所有阶段期间部件的引导,
或者通过这三种激活模式的组合。
根据本发明,可以基于控制模块来命令保护系统的实现,该控制模块实现由承载在车辆上的人工智能系统计算的展开策略。
因此,根据本发明的控制展开的方法基于深度学习,由于实现的动态试验而基于在这些试验的基础上执行的模拟,并且基于相同组或类似组的经验的共享。因此,控制系统被丰富并且在车辆的整个寿命期间提高其性能。该技术还允许处理其它配置:在高速下撞击动物或物体,例如自行车,无论是否已经列出,以及本身处于运动中的障碍物。
这种控制方法可应用于每种类型的车辆,特别是具有竖直散热器护栅的车辆,也可应用于任何类型的移动机械,例如,穿梭车、有轨电车或公共汽车。根据本发明的控制系统是开放式系统,并且其在单个分组中形成其数据库,该分组包含在车辆上和在相同类别的车辆上执行的数据和测量的累积经验,在开发阶段期间和在它们的操作寿命期间在彼此之间通信。
该数据库可有利地包括在开发期间在不同类型的人体模型和不同类型的车辆上执行的所有动态试验,以及使用多物理模拟工具完成的所有建模。
根据本发明的展开控制系统可以集成来自其自身经验的数据和来自其通信组的数据。特别地,在将来,车辆将变得越来越不个体化并且更一般地变得集体化,从而有利于数据的共享。
因此,障碍物的识别质量,无论是否是人,通过整个组的经验而被丰富,而且通过使保护系统适应于所识别的每种情况而被丰富。由于人工智能和深度学习,人们的安全性将因此以恒定的方式变得更好。
定义
以下给出了在以下描述中使用的术语的定义,以指定根据本发明的保护设备和展开控制系统的部件:
行人:
单独或成组的处于步行中的、直立或在地面上的人。在此提供给行人的技术服务可以扩展到自行车或任何其它个人运动模式的用户、动物或惰性物体。
保护模块:
容纳固定到车辆的可充气结构和气体产生系统的壳体。
外部可充气结构:
能够彼此连通的一组可充气袋,所述一组可充气袋的充气可被选择性地控制。
可充气袋:
形状可变的可充气封套,例如是管状的,其能够接收充气气体并且能够根据展开策略与一个或多个其它袋连通。
展开策略:
用于填充阀或通气口和致动器的一组控制信号。
阀:
控制气体通道的打开和关闭的系统,该系统位于充气气体供应管道和可充气袋之间,或者位于两个袋之间。这些阀可根据需要设置有防回流装置。阀的所有控制器通过线或任何其它连接系统(包括射流技术)连接或利用无线电通信的常见技术通过无线模式连接。在一个特定的示例性实施方式中,阀的控制的激活能量由电容器经由已知的总线系统提供。激活命令由电子芯片传输,而线确保电容器的充电、电路的质量的控制以及命令到芯片的传输。
阀或通气口:
静态打开和关闭气体通道的系统,该系统位于充气气体供应管道和可充气袋之间或者两个袋之间,该系统通常由盖关闭(不连通),并且响应于大于预定压力水平的压力而切换到打开模式(连通)。阀或通气口还可以以校准泄漏的形式实现,以延迟下游袋的加压。
气体发生器:
气体产生系统,无论是否是烟火的。该结构的展开由气体发生器保证。一些袋利用来自其它袋的气体被加压,超过发生器的功能。在某些情况下,可以采用外部发生器。
附图说明
根据以下参照附图的详细描述,将更好地理解本发明:
图1示意性地示出了根据本发明的处于展开模式的用于保护行人的系统,该系统装备在汽车上,
图2示意性地示出了根据本发明的处于展开模式的用于保护行人的系统,该系统装备在公共汽车上,
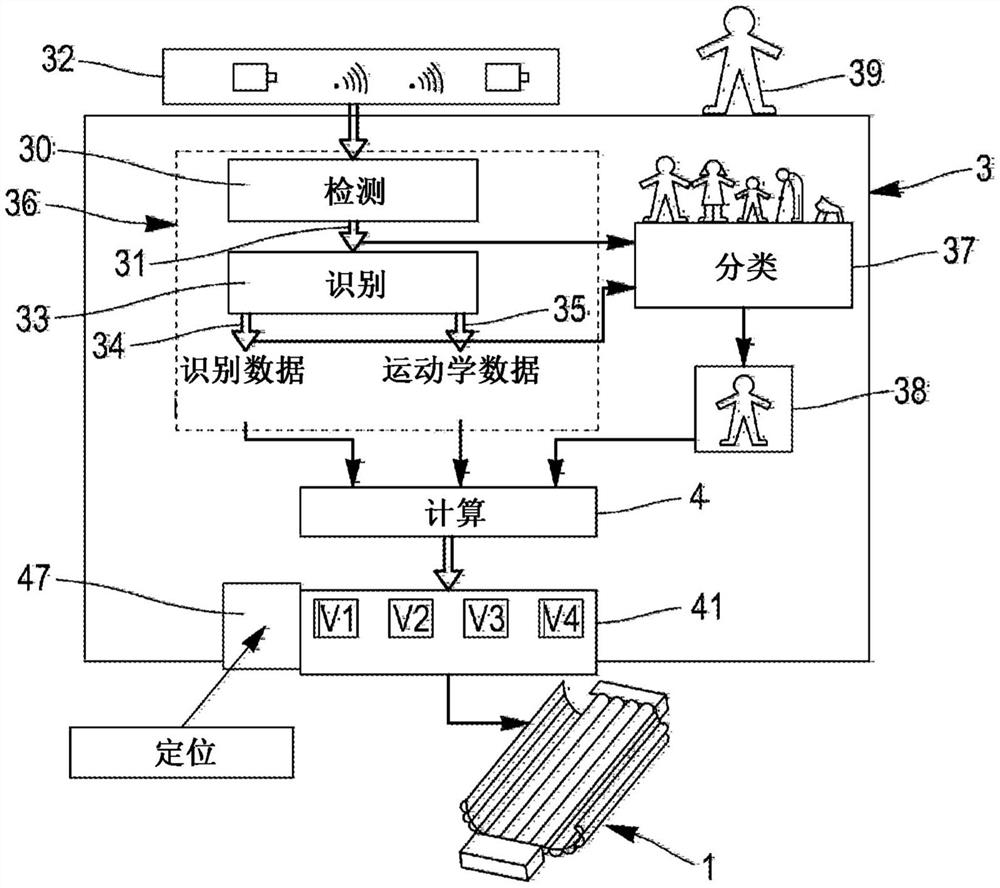
图3是根据本发明的用于控制展开的系统的一个示例性实施方式的功能图,
图4是根据本发明的用于保护行人的设备的示意图,该设备处于协作配置,
图5示意性地示出了外部可充气安全结构的为两个部分的第一配置,该外部可充气安全结构在根据本发明的行人保护设备中实现,
图6示意性地示出了外部可充气安全结构的为三个部分的第二配置,该外部可充气安全结构在根据本发明的行人保护设备中实现,
图7和图8示意性地示出了通过根据本发明的行人保护设备的外部可充气安全结构来处理行人的运动学,
图9A示意性地示出了在根据本发明的行人保护设备中实现的外部可充气结构的几何结构,
图9B是示出在处理大体型的男人的情况下对图9A的可充气结构的特定部分的选择性控制的计时图,
图10A示意性地示出了图9A的可充气结构的区域,这些区域在检测和处理小体型的女人的情况下将被激活,
图10B是示出在处理小体型的女人的情况下图9A的可充气结构的特定部分的选择性控制的计时图,
图11A示意性地示出了图9A的可充气结构的区域,这些区域在检测和处理儿童的情况下将被激活,
图11B是示出在处理小的儿童的情况下图9A的可充气结构的特定部分的选择性控制的计时图,
图12示意性地示出了用于实现在根据本发明的行人保护设备中实现的外部可充气安全结构的若干基本几何形状,
图13A、图13B和图13C示出了外部可充气安全结构的实现的实际示例,
图14示意性地示出了行人保护模块的特定实施方式,该行人保护模块在折叠模式下集成了气体发生器和可充气结构,
图15示意性地示出了容纳气体发生器的壳体的一个特定实施方式,可充气结构和供给阀固定在该气体发生器上,
图16示意性地示出了配备有控制阀的可充气结构的一个特定实施方式,以及
图17A和图17B分别示出了将行人保护模块集成在车辆的前表面中以及最初被容纳在行人保护模块中的外部可充气结构的展开的示例。
由于下面描述的实施方式决不是限制性的,因此如果行人保护模块的选择足以带来技术优点或者将本发明与现有技术区分开,则可以特别地考虑本发明的仅包括与其它描述的行人保护模块隔离的所描述的行人保护模块的这种选择(即使该选择在包含那些其它行人保护模块的短语内被隔离)的变型。这种选择将包括至少一个特征,优选地是没有结构细节的功能特征,或者如果结构细节的一部分单独足以带来技术优点或者足以将本发明与现有技术区分开,则仅具有结构细节的该部分。
根据本发明的保护设备可以用于配备在轻型汽车(图1)或公共运输车辆30(图2)上。在第一种情况下,该保护设备包括被集成在车辆的前表面中的保护模块2,该保护模块被设置成实现可充气结构1的展开和适当定位。在第二种情况下,该保护设备包括被集成在运输车辆30的前表面中的保护模块,该保护模块设置有用于在平移中移动展开的机械部件20,并且被致动以按适当的方式展开和定位可充气结构10。
保护设备可以借助于电动机械、机电或流体致动器动态地定位。该保护设备可以与提供三个自由度的旋转接头结合,并且其自身可从车辆的前方致动。
参考图3,根据本发明的用于控制展开的系统3被集成在车辆的行人保护设备中,该系统包括编程的检测单元30,以基于对源自装备在车辆上的一组32传感器的信号的处理来提供突然出现在车辆的前方的行人障碍物的检测数据31。
控制系统3还包括单元33,该单元用于将该障碍物39识别为行人,并用于确定所识别的该行人相对于车辆的运动学。该识别单元33处理检测数据31,并且反过来输出识别数据34和运动学数据35。
应当注意,检测单元30和识别单元33可以是配备在车辆上的驾驶员辅助系统36的组成部分。
控制系统3还包括分类单元37,该分类单元被设计成处理检测数据31和识别数据34,以便将所检测到和识别到的障碍物39分类到预定组的行人类别之中的给定行人类别38中。
分类单元37和识别单元33提供用于计算展开策略的单元4,该单元被编程为输出信号,该信号用于选择性地控制装备在车辆上的外部可充气安全结构1的定位47,并且用于填充41构成该外部可充气安全结构1的一组可充气袋42。
应当注意,分类单元37和计算单元4可以是控制系统3内的同一计算器的组成部分。甚至可以设想将检测单元、识别单元、分类单元和计算单元全部或部分集成在单个集成电子部件内。
参考图4,计算单元4经由一个或多个无线通信网络42实现数据库40和通信模块44到在“云”45中操作的服务器43。
数据库40适于存储学习数据,该学习数据(i)在行人保护系统的创建和评估阶段期间被收集,或者(ii)基于行人障碍物的检测和配备有行人保护系统的所连接的车辆46中的可充气结构的展开的事件被收集,或者(iii)基于经由一个或多个无线通信网络42被收集到在“云”45中操作的服务器43的数据被收集。
计算单元4利用(i)存储在数据库40中的学习数据、(ii)由分类单元37提供的数据、以及(iii)由识别单元33提供的运动学数据来实现人工智能技术。计算单元4反过来产生用于整个保护系统的一系列选择性控制信号41、47。
如图3和图4所示,根据本发明的用于控制展开的系统连接到装备在车辆上的视觉系统32,并且该视觉系统可能包括:
短距离和长距离前置相机
红外相机(0-30m)
激光雷达(0-100m)
超声(接近)传感器
雷达(30-100m)
超声(接近)传感器
在某些情况下,为了更快速和更可靠,根据本发明的控制系统还可以具有其自己的日间和夜间视觉装置。例如,被放置在挡风玻璃的顶部上的相机可以在实现保护系统的阶段期间跟踪行人的移动。
如图3中示意性示出的用于控制展开的系统3以进行中的方式接收和分析车辆的数据及其环境的数据。当它识别到危险情况时,它然后可以触发回避操纵、紧急制动,并且如果必要的话,接合保护系统的展开的连续阶段。
这些阶段由自动化系统提供的电信号激活,作为该自动化系统分析的情况的函数。由于对在危急事件之前和危急事件期间由自主车辆的引导系统或移动系统的驾驶员辅助系统的不同传感器接收的所有数据的分析,自动系统对每个事故配置提供特定响应。
用于控制和定位展开的该系统由于其人工智能而控制装备在车辆上的单个保护系统或若干保护系统的组合的空间和时间(时空)的激活。
与现有技术的系统不同,现有技术的系统在检测到撞击后基于预定算法一起触发空气缓冲垫的激活,用于控制展开的系统基于在撞击之前和撞击期间接收的信息来调节保护系统的响应。
来自装备在车辆的驾驶员辅助系统上的传感器的信息可以在行人保护设备展开之后干预行人保护设备本身。例如,被放置在挡风玻璃的顶部上的相机可以干预可充气结构的实现和展开。
所有这些数据在根据本发明的用于控制展开的系统中被合并和共享。
因此,根据本发明的用于控制展开的系统以恒定的方式利用每个人的经验被丰富和改进。开始时,用于控制展开的系统将确定与车辆撞击时的速度。如果这不为零,则该系统激活行人保护系统。
合并多传感器数据以用于识别行人障碍物。这些数据根据不同的源应该是同质的。仅处理对识别行人障碍物必要或有贡献的数据。
如图3中所示的识别单元33被配置成例如实现以下操作:
行人障碍物的位置:X/Y/Z坐标(或ρ/θ/φ),
行人障碍物的性质的识别:儿童、女人、男人、其它:动物、物体等。
身体质量的识别:很大、大、小:对身高和体重的估计,
行人障碍物的位置的检测:直立、躺着、弯腰、蹲着、处于侧面、在空中,
移动的检测:在行走、在骑自行车、在平衡车上、在滑旱冰、在滑板上、在摩托车上或任何其它移动装置上,
轨迹的估计:迎面而来的、垂直的、平行的,或相对于车辆的轨迹成一定角度,
例如,在t=0.5s时相对于车辆的相对速度和位置的确定,
附近的周围元素、其性质和轨迹的识别:车辆、卡车、摩托车/自行车、人行道、墙壁等,
车辆相对于地面的姿态的确定,
可选地,行人的运动学的跟踪。
参照图5,可充气结构1包括由彼此平行的一组相邻可充气袋5制成以便形成可充气垫子的第一部分1A和由横向地被布置成抵靠该垫子的端部边缘的可充气袋50制成的第二部分1B。为了产生包封效果,关于图5b袋在压力的作用下弯曲,该效果通过在前表面和后表面之间具有不同厚度的袋的各向异性结构来实现。
如下面将参照图12描述的,可充气袋5被布置成使得它们由于设置有阀/通气口或门的进入开口而能够彼此连通。
应当注意,门和阀/通气口可由独立的气体发生器代替。
在根据本发明的行人保护设备中实现的可充气结构的另一配置中,如图6.1和6.2所示,可充气结构6包括第一中心部分或袋6A、第二上部分或上袋6B(与图5(a)的部分1B相同)和第三下部分或下袋6C。
第一和第三部分或袋6A、6C具有可充气垫子结构。该部分或袋6A类似于图5(a)的部分1A,而第二部分或袋6B与图5(a)的部分1B相同。两个部分或袋6A、6C经由不同的阀独立地被加压。
还可以设置补充袋60以包围袋6C,从而给予其额外的刚性;这可以是各向异性的,如袋6B。
由C的U形袋提供的刚性使得在可充气结构中保持被拾取后重心在旋转接头下方的人。这可以被设计成升高袋的下部分。这种布置也能够拾取地面上的人。
如上所述,可充气结构6A或6A+6C可以是各向异性的,以便产生结构的弯曲形状,这种配置在突出风险的情况下是有利的。上表面相对于下表面被加强。这种加强可以被调整以有利于某些区域。同样,参照图13,该结构可以是梯形的。
更一般地,可充气结构的袋的几何形状可以根据车辆或特定策略而进行适应。
在本发明的框架中可以考虑不同的适应。例如,在可充气结构中横向袋存在于充气区的中间可以证明是有利的。
参照图6.2,还可以提出袋6A和6C部分重叠,以便确保可充气结构6在其中心对行人的更好保护。
袋1B或6B可以横向延长,并且它们可以是各向异性的,以便“升高”袋。
行人保护设备中实现的可充气结构由通常为圆柱形的袋制成,这些袋被组装在一起并通过调节的通气口连通。
作为示例,图5a的可充气结构由尺寸为140×220cm的主结构1A构成,该主结构包含管状形状的14个袋,其长度为220cm,直径为6cm。4cm的带子将袋连接在一起。
图6的可充气结构由两个袋6A构成;6C具有110×140cm的标称尺寸。袋6A和6C可在其相交的区域中重叠,以形成在该临界点处加强的保护区,参见图6.2和图15。
用于构造这些袋的优选解决方案之一是由两个织物带预制这些袋(图12)。袋120之间的中间部分被紧密地焊接,但这些接缝是不连续的,并且通道被布置用于定位阀或通气口以确保袋120’之间的连通(图12B)。折叠可以是对称的121、122(图12(A))或不对称的123、124(图12(C)和12(D))。在前一种情况下,可以减小袋之间的距离以确保可充气结构的弯曲,参见图12(F)。
图5中所示的袋1B的形式在图12(E)所示的一种配置中是各向异性的。袋1B的前表面是刚性的,后表面是柔性的。其在中心袋的顶部部分折叠以便封闭可充气结构(图5(b)),从而允许行人被保持在可充气结构(未示出)上。用于弯曲可充气结构的其它技术是可能的,特别是图12(f)中所示的技术。
根据行人的运动学对袋1B加压。
图16示出了阀的分布的示例:四个或五个阀V1将来自气体发生器(未示出)的气体传输到可充气结构的四个或五个中心袋。这些袋通过袋之间的自由通道彼此连通。四个阀V2供应前两个横向袋16B;其它袋通过自由通道彼此连通。阀V4供应袋16A。这同样适用于具有阀V3的袋16C。
图13A、图13B和图13C示出了可充气结构的配置的不同可能性。因此,通过逐渐加宽袋之间的带子,可以提供梯形形状(13B)。参照图13C,利用两种不同厚度的织物,可以使可充气结构137弯曲或弯折。
袋可以由PVC(聚氯乙烯)或用于制造
在另一种配置中,仅袋被放置在织物基体内部,从而确保可充气结构的形状。织物基体被调节到满足袋的机械保护和所需形状的需要。在这种情况下,尼龙6×6涂覆的氯丁橡胶或硅树脂粘合剂是优选的,但聚氨酯也是可能的。该技术允许加压功能与机械强度和可充气结构的形状的分离。这种配置允许使用具有不同强度的材料。
参照图14和图15,保护模块14包含可充气结构141、142,并且气体发生器15被包装在与模块14集成的密封壳体143中,并且可充气结构141、142固定到该密封壳体143。
保护模块固定到与车辆集成的旋转接头,可能是通过千斤顶(图1和图2),使得能够实现其在x、y、z方向上的可控的空间定向。
容纳气体发生器的壳体143具有三角形横截面的棱柱形形状(图15(a))。该壳体143的第一表面150(图15(b))构成第一板,该第一板支撑与可充气结构的下部分141和151的袋连通的各种阀。
如图5或图6中所述的袋在纵向上被折叠成三片。第一组四个或五个中心袋通过阀V1直接接收气体,而被折叠到该第一组上的成组的四个或五个袋将分别由四个阀或通气口V2供应。
图14中所示的可充气结构被折叠成两卷(“母语”),一个卷通过在模块的开口处形成的平台的引导而朝向前方展开,另一个卷朝向车辆的引擎盖向上展开。
因此,可充气结构被设计成首先轴向地展开,然后横向地展开。该结构的其它袋16A、16C由通气口或阀V3和V4供应。
保护模块的尺寸为40cm×20cm,深度为20至30cm。如图17A和图17B所示,该形状可以被调节成车辆前表面的配置。
气体发生器
若干技术可以确保结构的展开:
气体发生器包含推进剂作为其唯一的组成,调节推进剂的弹道特性以确保在超过50毫秒的时间内完全燃烧;
气体发生器包含由至少一种氧化剂装料和至少一种还原装料的混合物组成的单一组合物,所述至少一种氧化剂装料和所述至少一种还原装料的分解由被设计成确保在超过50毫秒内完全产生气体的供能装置控制;
气体发生器包括含有固体推进剂的第一腔室和含有第二组合物的第二腔室,所述第二组合物由至少一种氧化剂装料和至少一种还原装料的混合物组成,所述固体推进剂形成块,调节所述块的厚度和化学特性以确保气体在超过50毫秒内完全燃烧。
作为示例,气体发生器具有以下特征:
最后一种解决方案具有提供化学中性和无尘气体的优点。
压缩气体或压缩机也可单独使用或补充如上所述的气体发生器。
作为示例,相对于外部压力和内部压力,所述保护设备中的压力对于模块是1MPA(10巴),对于袋是0.02至0.05MPA。
现在将参照图7和图8描述在检测到成人7的人中的行人之后集成在车辆10中的行人保护设备的展开过程。
装备在车辆10上的检测系统,例如相机、激光雷达和雷达,已经预先检测到行人。安装在车辆10的驾驶员辅助系统内的计算单元中的算法已经将该行人识别为成人7。该人的运动学已经相对于车辆10的运动学进行了确定。检测数据和识别数据已经允许行人被分类到这样的类别中,即对于该类别,经验数据已经预先存储在承载在车辆10上的数据库中。
然后,计算单元根据分类类别产生选择性控制信号,该选择性控制信号去往位于车辆10的前表面中的安全模块。
该安全模块固定到旋转接头,该旋转接头本身可以定位在千斤顶上,该千斤顶使旋转接头向前移动,参见图2。
可充气结构1的初始展开所需的时间应该是使得该可充气结构在到达行人之前展开。当下部分71与行人的身体的底部接触时,行人翻转到可充气结构1的中心部分72上,并且由于车辆10的速度而被压平抵靠该中心部分。
此后,参照图8,可充气结构1的袋1B被展开,以便保护行人7的头部并将其保持在车辆上直到车辆停止。
在本发明的框架中可以考虑许多其它展开策略。
因此,在一个实际情况中,在识别碰撞风险并且实现具有紧急制动的激活的回避操纵之后,系统将与行人的碰撞识别为不可避免的。
撞击运动学的数量级为:
在35km/h或大约10m/s的速度下,在普通条件下的紧急制动时,停止时间被估计为1至1.5s,并且停止距离被估计为4.5至6m,
可充气结构的展开时间为300ms并且其内部压力为0.12至0.15MPA,
可充气结构的旋转接头位于距地面0.5m处,角度相对于车辆的轴为30°,这使得行人和可充气结构之间的接触点距离车辆1m,
在撞击之前如果没有保护系统,给出用于激活可充气结构的命令为距离车辆4m处,400ms内。
由系统提供的视觉运动学数据使得可以计算停止距离。如果这不足以避免碰撞,则应当激活保护系统。
如以下所示,可以减少用于激活系统的时间150ms。在这种情况下,在撞击之前如果没有保护系统,给出用于激活可充气结构的命令为距离车辆2.5m处,250ms内。
有效利用行人保护设备的累积经验和交换经验将带来根据本发明的展开控制系统的改进。作为示例,但不限于此,在图9A、图9B、图10A、图10B、图11A、图11B中示出的在以下三个示例中实现的可充气结构由通过阀V1供应的中心部分和通过阀V2供应的四个横向部分9DS、9DI、9ES、9EI构成,该中心部分由两个独立的袋9A、9C构成。
两个袋之间的空间减小,以便实现根据图12(F)的包封效果,并且在中心部分的任一侧的两个轴向结构或轴向袋9B、9F由阀V3和V4供应。
现在将参照图9A和图9B描述在识别为成人人类的情况下,在根据本发明的行人保护设备内选择性地展开外部可充气结构的过程。所检查的配置可以是1.75米和80公斤的成人7的配置,其静止站立且基本上以车辆为中心,距离车辆4米的距离。紧急制动已经被触发,并且车辆的初始速度是35km/h。
参照图9B,假设在初始时刻To,给出阀V1的选择性命令,以从气体发生器仅使上中心部分9A和下中心部分9C充气。同时或在此之前,选择性命令已经将模块轴向地和横向地定向,以便优化行人的处理。可充气结构9在时间T1与通常为男人7的行人障碍物接触。在与时间T1相隔几十毫秒的时间T2,男人7被保持抵靠两个充气的中心部分9A、9C,从而相对于道路形成初始角α。在随后的时间T3,可充气结构9朝向车辆的引擎盖翻转第二角度β。在由计算单元确定的下一时间T4,阀V4被选择性地命令以产生上端部部分9B的充气,并因此保持男人7并防止他向前移动。在同样由计算单元确定的下一时间T5,然后选择性地命令阀V2使适于朝向中心部分9A、9C折叠的横向部分9D和9E充气,直到男人7被至少部分地包封(时间T6)。最后,计算单元在时间T7发送选择性命令,以使阀V3将气体注射到下端部部分9F中,直到其充气,从而防止已被举起的男人7向下滑动。
该选择性命令可以按照命令和持续时间来修改操作的序列。例如,如果可充气结构需要被加强以处理行人,则阀V3的控制可利用阀V1的控制来激活。
现在将参照图10A和图10B描述在通过上述类型的可充气结构检测和处理1.6米和60公斤的小体型女人的情况下,实现集成了图9A的可充气结构的行人保护设备的示例。
该行人障碍物的先前识别将导致将女人分类到与用于装备在该结构上的阀的特定选择性命令对应的特定类别中。
这种行人障碍物与大体型男人的行人障碍物的区别主要在于,她的骨盆位于较低位置,并且她的重量较轻。为了确保对该行人障碍物的有效保护,重要的是她能够被可充气结构举起并且不从可充气结构弹回。
为此目的,在撞击后,当行人和车辆之间的相对速度被取消时,袋9D、9E的阀V2将打开,以便减小袋9A中的过度压力,并因此防止这种弹开。在这种配置中,位于后视镜的区域中的相机是特别有用的。
为了将小体型的行人保持在车辆上,将优先使下端部部分9F充气。
因此,假设在时间T10,响应于行人障碍物8的识别及其分类为小体型的女人的类别,计算单元已经发送了用于定位模块和阀V1控制下中心部分9C的充气的选择性命令。在时间T11,充气到足够的压力水平以确保预定的刚性的该下中心部分9C与行人障碍物8的下肢接触。几毫秒后,在时间T12,命令阀V1控制上中心部分9A充气以接收行人8的身体。可充气结构9通过动态效应翻转(时间T13),同时用于使下端部部分9F充气的阀V3被激活以将行人8保持在可充气结构9上。在时间T14,横向部分9D、9E然后通过阀V2的选择性命令而充气,以利于适于正被处理的人类障碍物8的形态的撞击区域80的上部充气。
现在将参照图11A和图11B描述通过上述类型的可充气结构处理被识别和分类为0.70米和11到12公斤的儿童的行人的具体示例。
在这种配置中,儿童不能走到车辆下方是至关重要的。为此,在时间T20,通过激活阀V1分别使下中心部分9C和下端部部分9F充气,以形成屏障(时间T21)和选择性充气的区域110,儿童11在接触时刻(时间T22)将抵靠该选择性充气的区域移动,并且通过旋转接头和/或通过横向U形各向异性袋60(图6)被基本上抬起。与此同时,下横向部分9DI、9EI被充气以完全包围儿童11,从而最佳地保护儿童免受外部危险。
在对应于儿童行人的一种配置中,例如10岁(1.30米,30kg)的儿童,袋被展开,但是人的重心靠近旋转接头。为了使儿童的重心在旋转接头上方,并因此保护儿童在接触时刻(时间T22)翻转到引擎盖上,引擎盖应当基本上升高。这可以通过旋转接头和/或通过横向U形各向异性袋60来实现,参见图6。
与此同时,下横向部分9DI、9EI被充气以便包围儿童11,从而最好地保护儿童免受外部危险。
使用情况1
我们将考虑图16或图5中所示类型的可充气结构,该可充气结构的尺寸为140×220cm。该结构包括管状形状的14个袋,袋的直径为6cm,长度为220cm。关于图16,控制阀由V1和V3表示,而其它阀不被调节。阀V4是校准的孔,以延迟袋16A的加压。
在这种使用情况下,行人是身高1.75米、体重75千克、直立站立在车辆前方的成年人。
当行人在初始时间T=0时距离车辆4m并且当车辆处于35km/h的速度时,给出展开的命令。车辆的停止距离大于该距离。
命令如下:
调节模块的位置并激活气体发生器,
激活阀V1,根据配置决定阀V3。
可充气结构是可操作的并且在T=300ms时与行人接触。袋16A由主结构的其它袋或通过独立的发生器逐渐被加压。
行人被翻转到可充气结构上并且他的头部在T=450-500ms时与可充气结构接触。
车辆的停止发生在T=1000ms。
在这种情况下,选择性控制实现以下步骤:
选择联接至阀V1的气体发生器的启动时间,
命令模块的位置的校正,
根据由检测装置分析的行人的重量的配置和地面的粗糙度,打开或不打开阀V3。
使用情况2
我们将考虑与使用情况1中相同的配置,但是行人在移动中,并且用于控制展开的系统认为他相对于车辆的中心交错。
旋转接头将确保模块在车辆的方向上和横向上的位置,以便使可充气结构居中在行人上。该系统还可具有控制的阀V2,并使第一侧优先。
使用情况3
我们将考虑与具有图6或图17A、图17B中描述的类型的可充气结构的使用情况1的情况相同的配置。
当行人距离车辆2.5m时,给出展开命令T=0。
命令如下:
调节模块的位置并激活气体发生器,
激活阀V1C和阀V3。可充气结构C可操作并且在时间T=150ms时与行人接触。
激活阀V1B,使得袋16A被逐渐加压。
然后行人在时间T=300-350ms时翻转到可充气结构上并且他的头部与可充气结构接触。
车辆的停止发生在时间T+1000ms。
然后,选择性控制没有进一步的命令要发送。
使用情况4
在该最后的配置中,该系统利用被放置在配备有根据本发明的保护设备的车辆的后视镜的水平处的相机,以便根据行人的运动学来优化袋的展开。根据行人的形态和重量,可以使袋16B更刚性或更柔软,并优化袋16A的充气。
根据本发明的保护设备因此可以处理以下配置:
行人相对于车辆处于移动(慢跑),
行人相对于车辆处于移动(自行车,轮滑,踏板车,独轮车)。
可以设想行人障碍物的其它配置:几个行人的组、带有推车或婴儿车的人等。
参考图17A和图17B,我们现在将示意性地描述在车辆17的前表面中实现根据本发明的行人保护设备146的示例。该保护设备146被布置在相对于地面大约50cm的高度处,直接在车辆17的散热器护栅的上部分170的后面。
行人保护设备146包括在密封外壳171内的卷起以用于可充气结构的两个部分141、142和容纳在棱柱形形式的壳体中的气体发生器模块143,该壳体包含气体发生器和用于充气的板,两个部分141、142的不同的袋固定到该壳体。
当用于控制配备在车辆17上的展开(图17A、图17B中未示出)的系统响应于行人障碍物的识别而将控制信号传输到保护设备146时,气体发生器模块通过一个或多个致动器(未示出)移动,以便确保可充气结构的适当定位,可充气结构的两个主要部分141、142经由位于发生器模块143的两个板上的阀从气体发生器选择性地且逐渐地被充气。
下部分141刚性地充气,以便从散热器护栅的上部分延伸到地面,从而确保安全地接收行人,而上部分142刚性地充气,以便从散热器护栅的上部分基本上延伸到挡风玻璃的顶部,从而防止行人与该挡风玻璃接触。
当然,本发明不限于刚刚描述的示例,并且在本发明的框架中可以设想许多其它配置。特别地,外部可充气结构可以包括与刚刚描述的袋不同数量的袋。这些袋的尺寸也可以适用于特定的用途。此外,阀的数量可以与刚刚描述的不同,并且阀的数量可以适用于构成外部可充气结构的袋的数量和配置。速度和距离仅作为示例给出;该保护系统可以适用于任何移动对象并且在宽范围的速度中。
由根据本发明的行人保护设备可以处理的障碍物不限于直立或躺卧的行人,而是还可以包括突然出现在车辆前方的任何种类的动物或物体。
最后,根据本发明的用于控制展开的系统还可以被实现为选择性地控制车辆的乘客车厢内部的气囊的充气,这可以因此受益于通过外部可充气结构的选择性控制而发动的人工智能能力。
- 用于控制装备在车辆上的外部可充气行人安全结构的展开的方法和系统以及集成所述系统的行人保护设备
- 用于车辆行人保护装置的控制方法和系统、处理器