一种多芯双头矩形连接器电缆的辅助插装装置
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及连接器技术领域,尤其涉及一种多芯双头矩形连接器电缆的辅助插装装置。
背景技术
在多芯双头矩形连接器电缆装配过程中,一头电缆装入矩形连接器后,另一头多根甩线需要根据线缆关系逐个插装入矩形连接器孔位,插装完成后两头连接器的线缆接线关系需要一一对应,对于9芯、15芯等芯数较少的双头电缆人工可直接根据线标和接线表关系逐一插装,对于25、37、66、100等芯数较多的双头矩形连接器电缆,人工进行插装时,甩线端不易清理线号,并且插装时连接器的孔位较多也不易定位,需要耗费大量人力和时间,并且容易出现错接、漏接等质量事故。
发明内容
本发明针对现有技术的不足,提供了一种多芯双头矩形连接器电缆的辅助插装装置。
本发明通过以下技术手段实现解决上述技术问题的:
一种多芯双头矩形连接器电缆的辅助插装装置,包括壳体、双轴模组、点状激光器、定位夹具、转接板、公共端镊子、144芯插头、一体上位机、PLC模块和内部电路;
所述壳体包括基座和机箱,所述机箱设置在基座上,所述基座上安装有双轴模组、点状激光器和定位夹具,所述基座上放置有转接板和公共端镊子,所述机箱内嵌有144芯插头、一体机、机箱内置PLC模块和内部电路;
所述双轴模组固定于基座上,所述双轴模组包括X轴模组和Y轴模组,所述Y轴模组垂直固定于X轴模组上,可控制沿X轴和Y轴两个方向运动;
所述点状激光器固定于Y轴模组上,所述点状激光器发射光垂直照射基座表面,所述点状激光器跟随双轴模组运动,照射所述定位夹具上不同连接器孔位;
所述转接板与所述144芯插头电性连接,所述144芯插头与所述PLC模块电性连接;
所述公共端镊子与机箱内部电路电性连接;
所述一体上位机识别电缆线号,控制双轴模组运动。
优选的,所述转接板为公座和母座矩形连接器,所述转接板与所述144芯插头电性连接。
优选的,所述一体上位机读取PLC寄存器的线号结果,所述一体上位机通过运动控制卡控制双轴模组运动,所述一体上位机自动识别电缆线号、语言播报电缆线号、界面显示电缆线号和电缆线号位置、控制双轴模组运动指示多种芯数双头矩形连接器电缆的连接器插装孔位位置。
优选的,所述公共端镊子与所述机箱内部电压电性连接,所述公共端镊子接触PLC点位。
优选的,所述双轴模组包括伺服电机、丝杆、滑块和限位光电开关,所述伺服电机上传动连接丝杆,所述丝杆上连接有滑块,所述限位光电开关电性连接伺服电机。
本发明的优点在于:采用双轴模组、点状激光、定位夹具及一体机构成,对于多芯双头矩形连接器电缆,人工用公共镊子逐一选取用线电缆,自动识别和播报电缆线号,模组带动点状激光器定位到夹具端固定的矩形连接器孔位上,人工根据激光指示对多芯矩形连接器电缆的另一端连接器进行电缆插装,在多芯矩形连接器电缆装配中,可自动识别和播报电缆线号、指示矩形连接器插装孔位,辅助插装,该设计体积小、可靠性高、节省人力物力。
附图说明
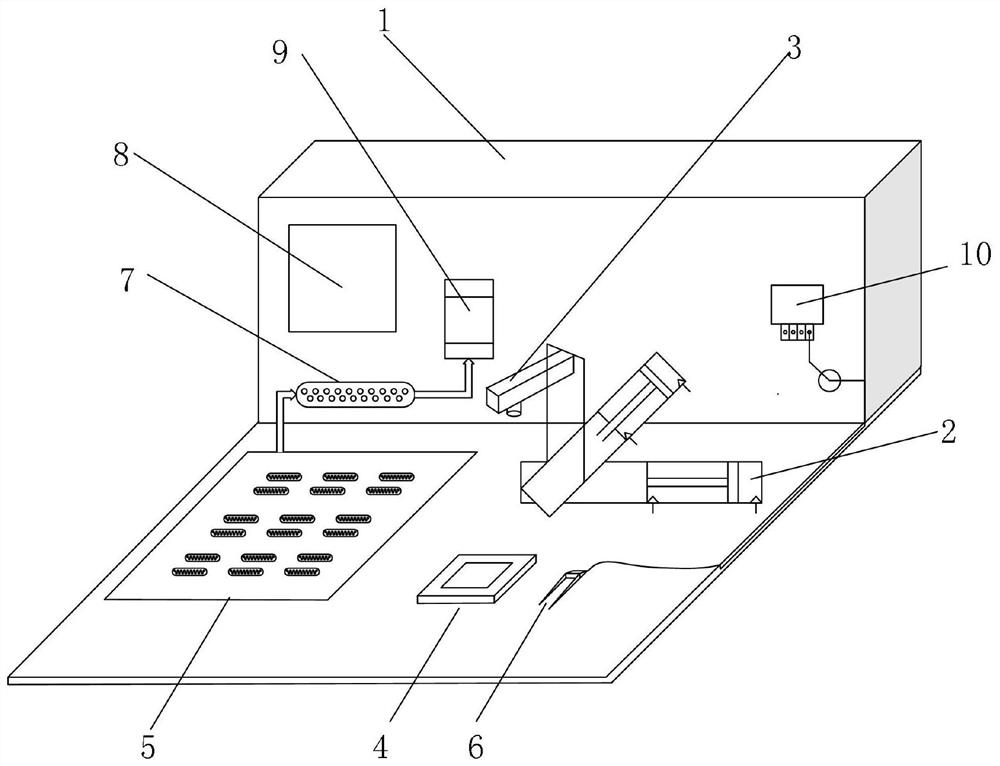
图1为本发明整体结构示意图。
图中标号:1、壳体,2、双轴模组,3、点状激光器,4、定位夹具,5、转接板,6、公共端镊子,7、144芯插头,8、一体上位机,9、PLC模块,10、内部电路。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
如图1所示,本实施例所述一种多芯双头矩形连接器电缆的辅助插装装置,包括壳体1、双轴模组2、点状激光器3、定位夹具4、转接板5、公共端镊子6、144芯插头7、一体上位机8、PLC模块9和内部电路10;
所述壳体1包括基座和机箱,所述机箱设置在基座上,所述基座上安装有双轴模组2、点状激光器3和定位夹具4,所述基座上放置有转接板5和公共端镊子6,所述机箱内嵌有144芯插头7、一体机8、机箱内置PLC模块9和内部电路10;
所述双轴模组2固定于基座上,所述双轴模组2包括X轴模组和Y轴模组,所述Y轴模组垂直固定于X轴模组上,可控制沿X轴和Y轴两个方向运动;
所述点状激光器3固定于Y轴模组上,所述点状激光器3发射光垂直照射基座表面,所述点状激光器3跟随双轴模组2运动,照射所述定位夹具4上不同连接器孔位;
所述转接板5与所述144芯插头7电性连接,所述144芯插头7与所述PLC模块9电性连接;
所述公共端镊子6与机箱内部电路10电性连接;
所述一体上位机8识别电缆线号,控制双轴模组运动。
所述转接板5为公座和母座矩形连接器,所述转接板5与所述144芯插头电性连接。
所述一体上位机8读取PLC寄存器的线号结果,所述一体上位机8通过运动控制卡控制双轴模组2运动,所述一体上位机8自动识别电缆线号、语言播报电缆线号、界面显示电缆线号和电缆线号位置、控制双轴模组2运动指示多种芯数双头矩形连接器电缆的连接器插装孔位位置。
所述公共端镊子6与所述机箱内部电压电性连接,所述公共端镊子6接触PLC点位。
所述双轴模组2包括伺服电机、丝杆、滑块和限位光电开关,所述伺服电机上传动连接丝杆,所述丝杆上连接有滑块,所述限位光电开关电性连接伺服电机。
使用时,转接板5上的多个连接器孔位与144芯插头孔位安装孔位顺序全部一一对应电连接起来,144芯插头7孔位与PLC的144个点位按顺序一一对应连接起来,将公共端镊子6与机箱内部参考电压连接,用公共端镊子触碰PLC的点位,线号输入有效,用公共端镊子6夹取甩线端一个线缆,甩线端的线缆连接入内部参考电压,另一端装好连接器的一个孔位对应连接器甩线端的线缆,连接器的对应孔位连接至PLC模块9中,PLC模块9对应点位输入信号有效,PLC识别出甩线端线缆的线号,写入内部寄存器,一体上位机8读取内部寄存器线号,语音播报线号,在界面显示线号以及对应芯数矩形连接器上的孔位。
一体上位机8编写多种芯数双头矩形连接器电缆插装位置机种,每个机种根据对应的矩形连接器确定孔位坐标,连接器孔位的计算过程:将连接器固定在定位夹具上,移动双轴模组2至点状激光器3可照射在第一个孔位上,将此坐标作为第一孔位的XY坐标,根据第一个孔位的位置和矩形连接器孔位分布规律,计算所有孔位的分布位置坐标,一体上位机识别出甩线电缆线号后,根据事先定义的孔位坐标,发出脉冲控制双轴模组2运动孔位坐标上,指示矩形连接器对应孔位的插装位置。
需要说明的是,在本文中,如若存在第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种多芯双头矩形连接器电缆的辅助插装装置
- 一种光纤连接器陶瓷插芯装纤设备